






全开源代码 BLDC PMSM FOC 有感 无感 滑膜 霍尔 编码器
基于STM32F1的有传感器和无传感驱动
直流无刷电机有传感器和无传感驱动程序,
无传感的实现是基于反电动势过零点实现的,有传感的霍尔实现。
永磁同步电机有感无感程序,有感为霍尔FOC和编码器方式,
无感为换滑模观测器方式。
有原理图和文档
ID:2615677134735901
左手指月
全开源代码 BLDC PMSM FOC 有感 无感 滑膜 霍尔 编码器
本文将围绕开源代码、BLDC(无刷直流电机)、PMSM(永磁同步电机)、FOC(磁场定向控制)等关键词展开探讨。主要介绍基于STM32F1开发板的有传感器和无传感器驱动程序,并重点关注直流无刷电机的有传感器和无传感器的实现方法。
在直流无刷电机驱动中,无传感器驱动是基于反电动势过零点实现的。反电动势是指电机运行时产生的电动势,当电机转子通过过零角度时,反电动势为零,可以通过检测反电动势过零点来确定电机的转子位置。相比于传统的有传感器驱动,无传感器驱动方案具有更低的成本和更高的可靠性。
有传感器驱动方案则是通过霍尔传感器实现的。霍尔传感器是一种能够检测磁场变化的传感器,可以用于测量电机转子位置。通过读取霍尔传感器的输出信号,可以准确地确定电机的转子位置,从而实现精准控制。
本文还将介绍永磁同步电机的有传感器和无传感器程序。在有传感器方案中,可以采用霍尔FOC和编码器方式进行控制。霍尔FOC是通过读取霍尔传感器的输出信号来实现电机控制,编码器方式则是通过读取编码器的输出信号。而在无传感器方案中,可以采用换滑模观测器方式进行控制。换滑模观测器是一种基于滑模变量的观测器,通过观测电机转子位置的滑模变量来实现控制。
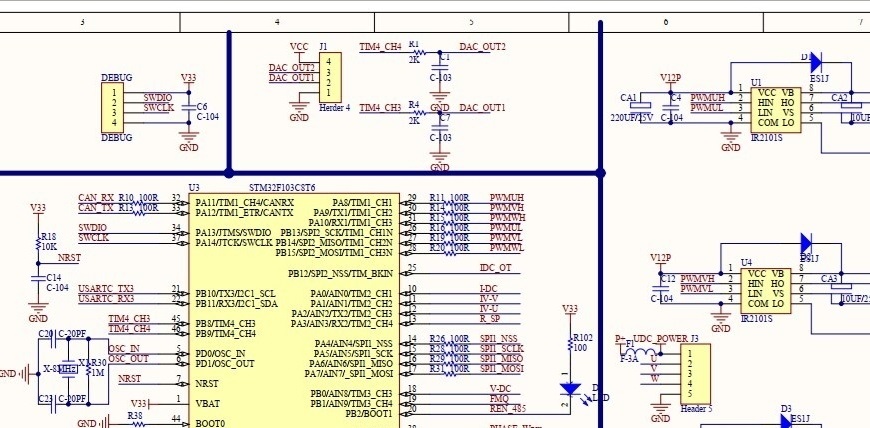
最后,本文还提供了相应的原理图和文档供读者参考。这些资源将帮助读者更好地理解和应用BLDC和PMSM的驱动程序。
总结来说,本文以全开源代码为基础,详细介绍了基于STM32F1开发板的有传感器和无传感器驱动程序。通过深入探讨直流无刷电机和永磁同步电机的驱动方案,读者可以更好地理解和应用这些技术,并在实际项目中得到应用。同时,本文提供的原理图和文档也为读者提供了宝贵的参考资料。
(字数:606)
以上相关代码,程序地址:http://coupd.cn/677134735901.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









