







基于合成孔径雷达(SAR)图像的船只检测(数据集+模型+图形化界面)
🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳
视频地址:手把手教你使用YOLO11实现车辆检测与追踪系统_哔哩哔哩_bilibili
🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳🥳
开始之前,我们先科普一下什么是SAR图像。成孔径雷达(SAR)是一种通过主动发射微波脉冲并接收地面反射信号生成高分辨率图像的遥感技术,其核心优势在于全天候、全天时工作能力,能够穿透云层、雨雾及植被,并利用极化模式(如HH、VV、HV/VH)和不同波段(如L、C、X、P)获取地表散射特性,从而支持地物分类与目标识别。SAR图像兼具丰富的纹理、几何和相位信息,通过合成孔径技术提升距离与方位分辨率,广泛应用于地形测绘、灾害监测(如洪水、地震)、军事侦察、城市规划及生态研究等领域。技术发展呈现多平台协同(机载高分辨率与星载全球覆盖互补)、多波段融合(如NISAR系统的L/S波段协同)、以及人工智能驱动的解译优化(如卷积神经网络辅助特征提取)等趋势,未来将进一步提升成像精度、数据处理效率及多场景应用能力
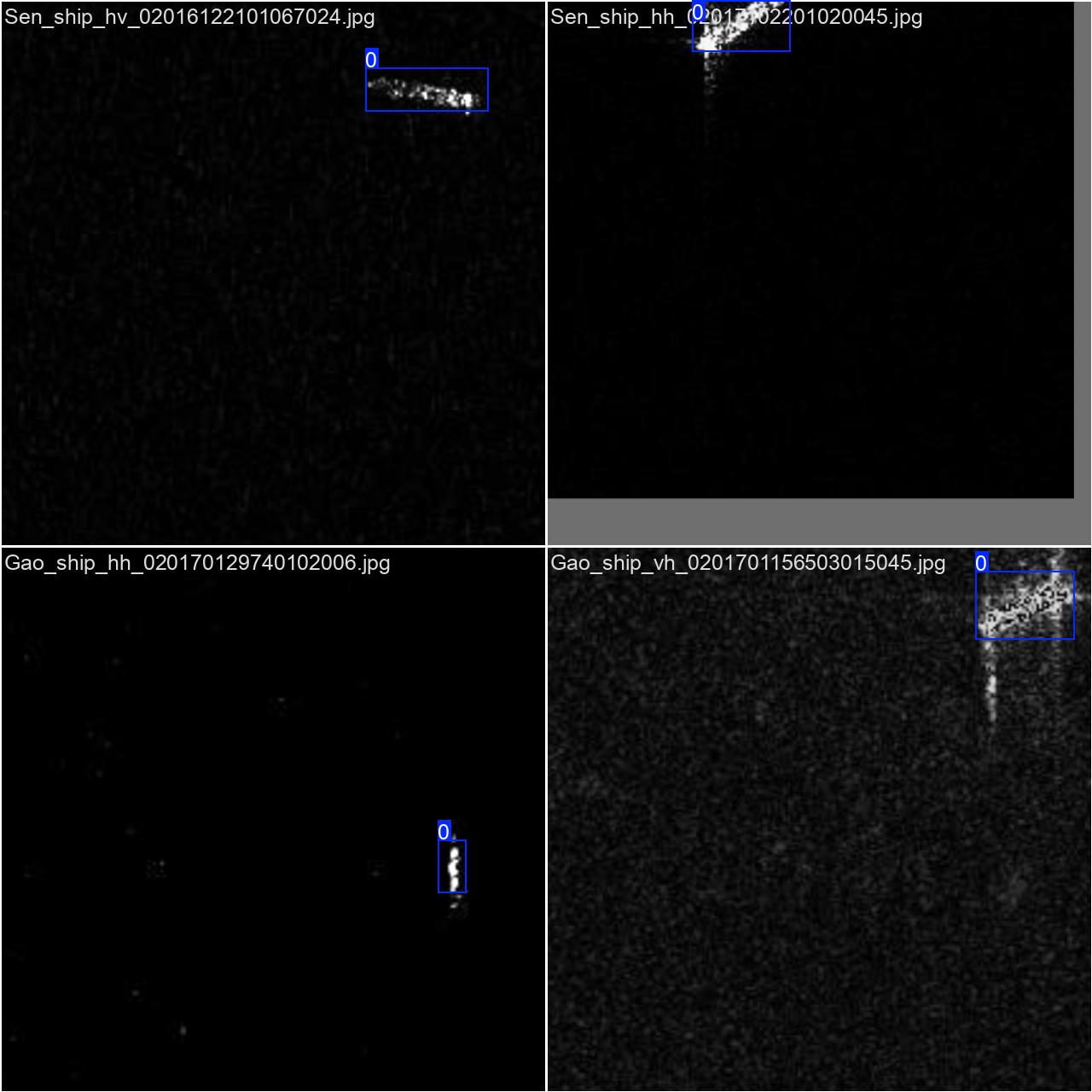
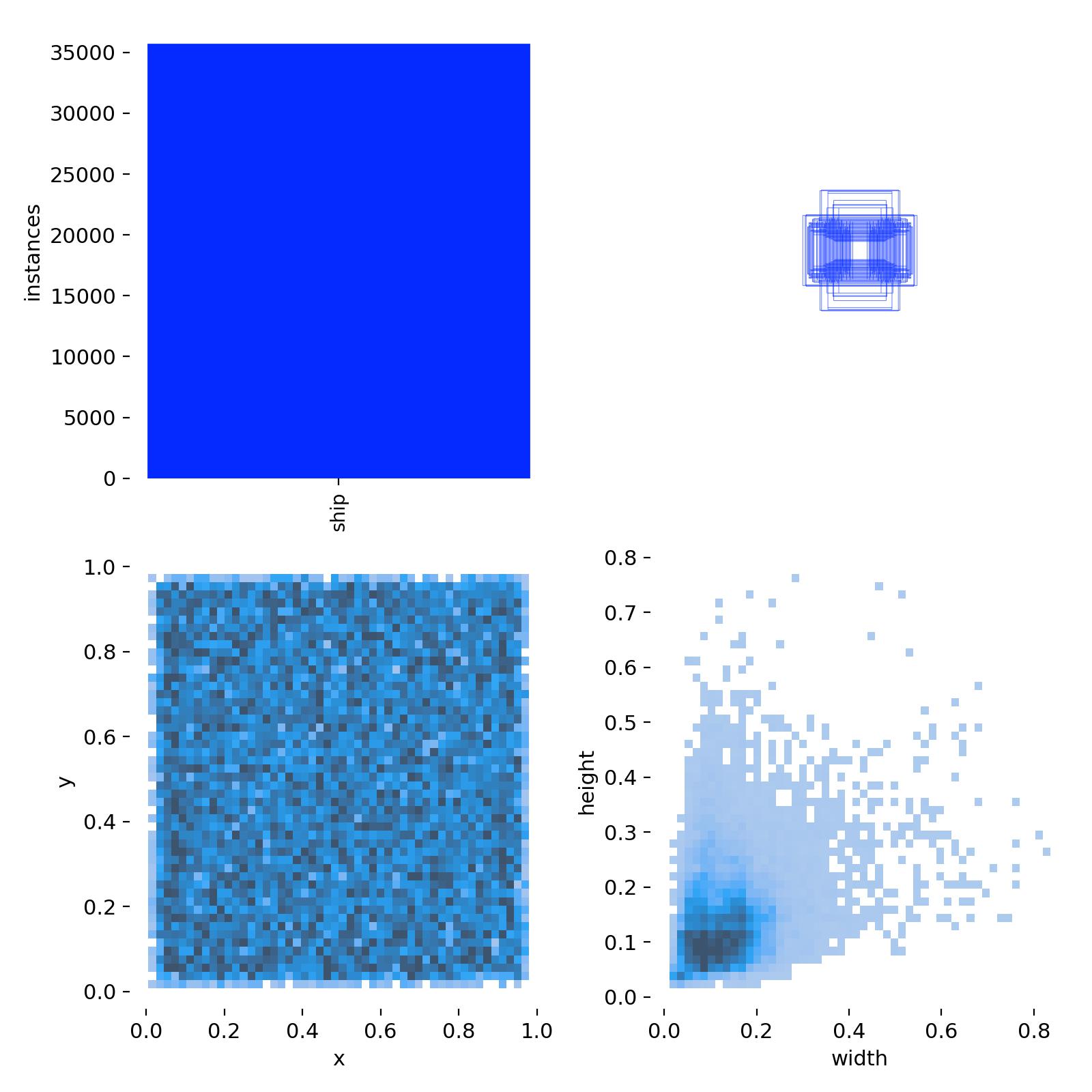
各位小伙伴,大家好,这里是肆十二,上一期的教程中我们主要对可见光条件下的船舶开发了检测系统。在实际的应用中,sar图像是经常接触到的实际图像,所以本期我来进行进行合成孔径雷达下的船舶检测,本次的数据集包含大概有3w张图像,类别只有ship一个。
- ‘ship’ 船只
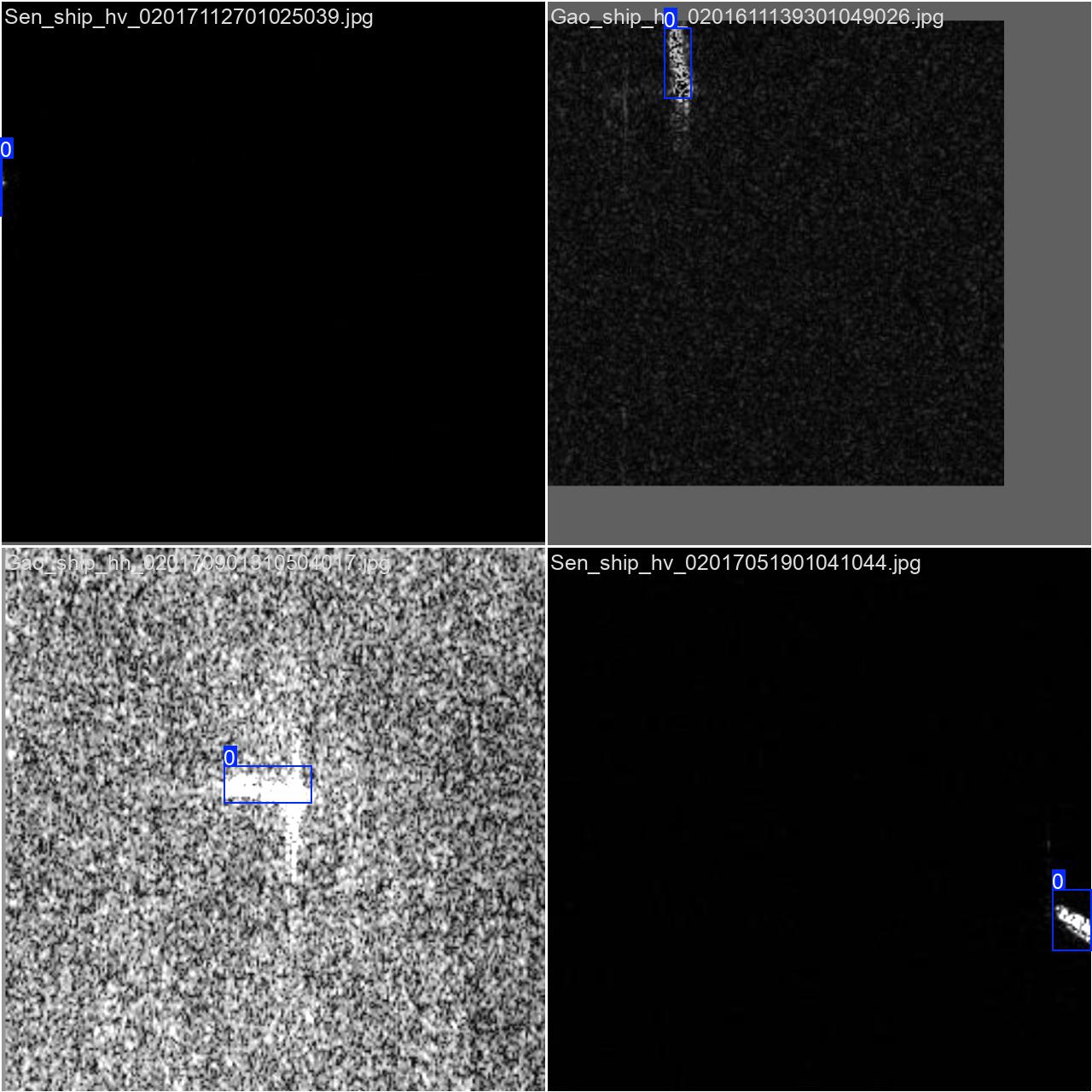
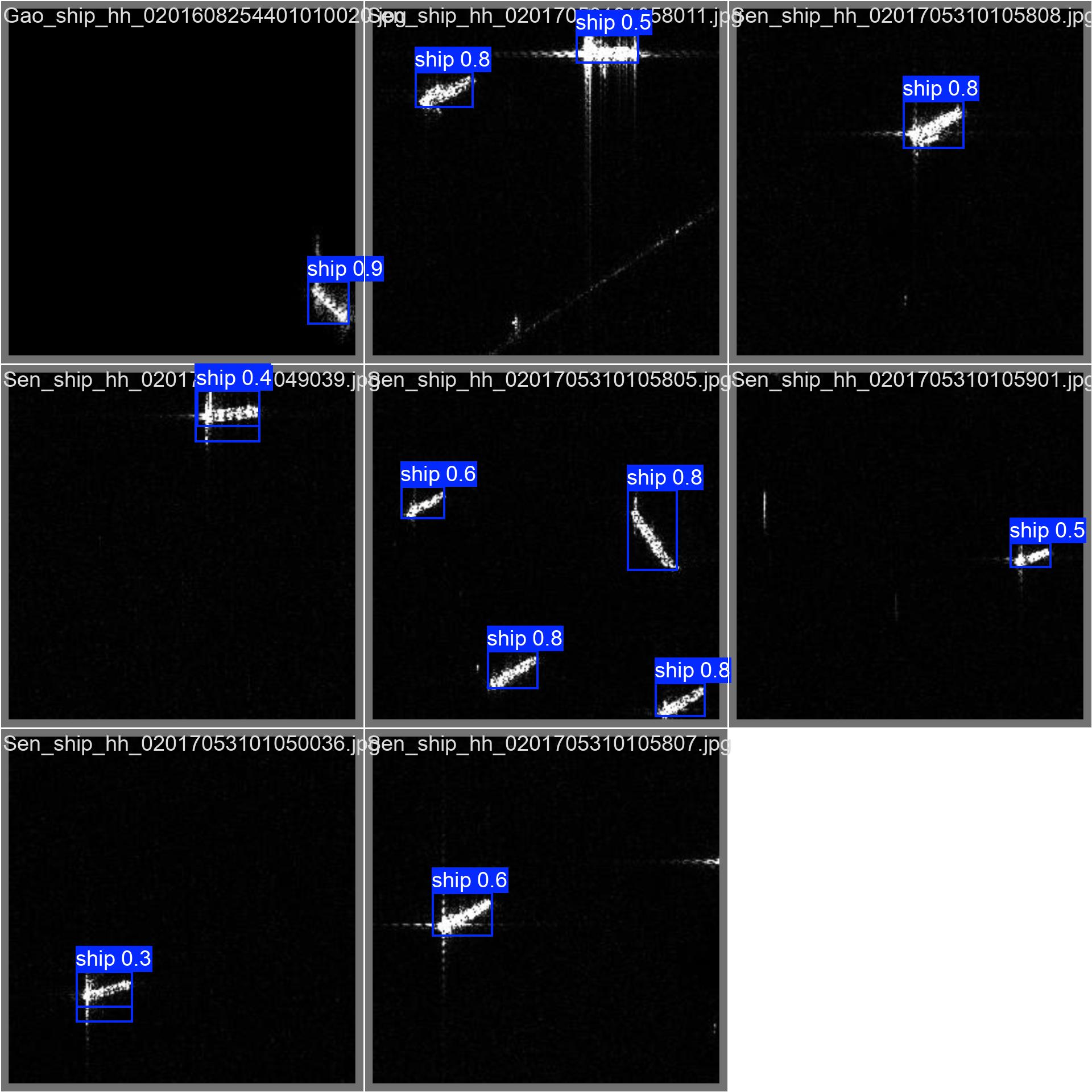
以下是部分数据示例。
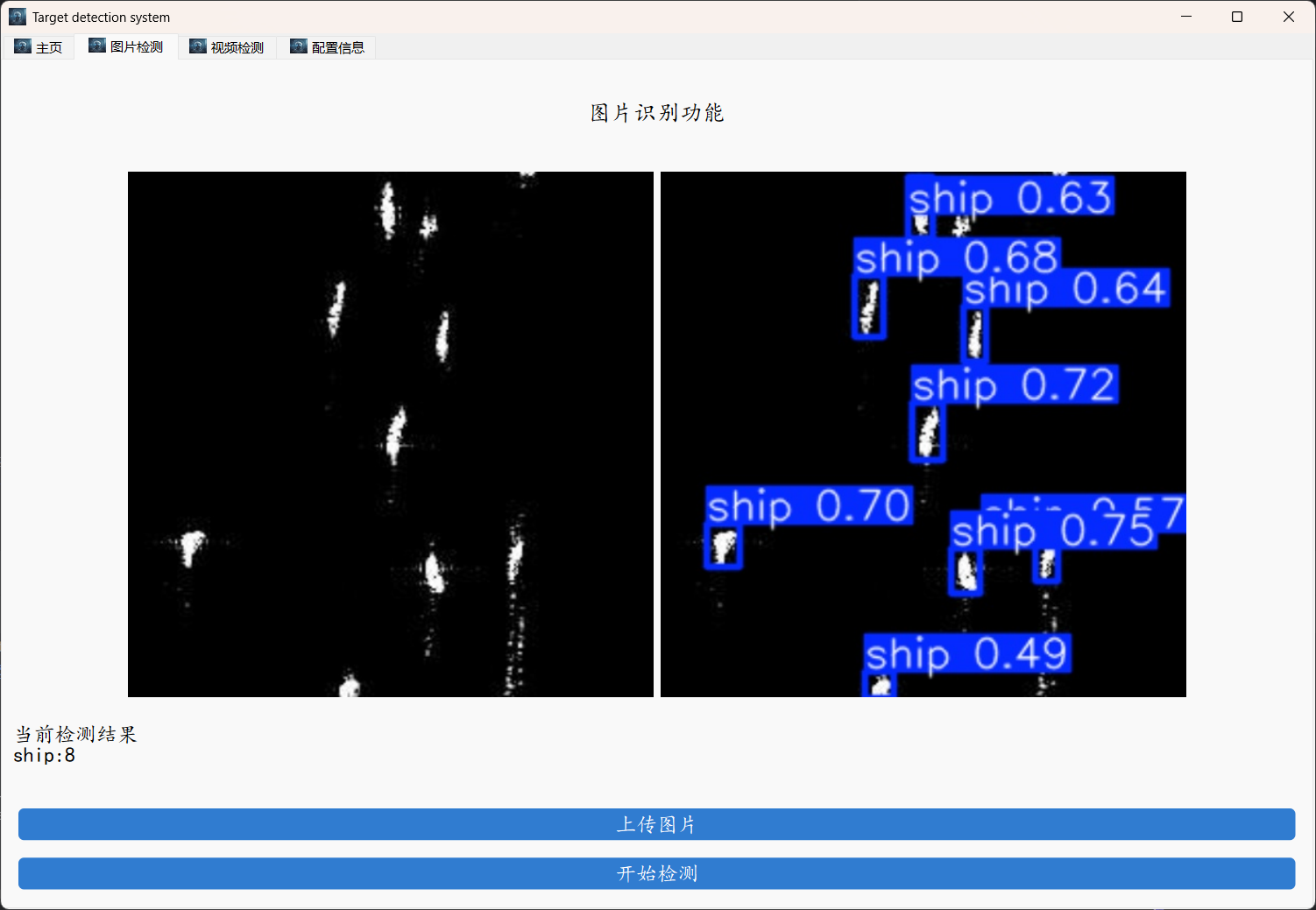
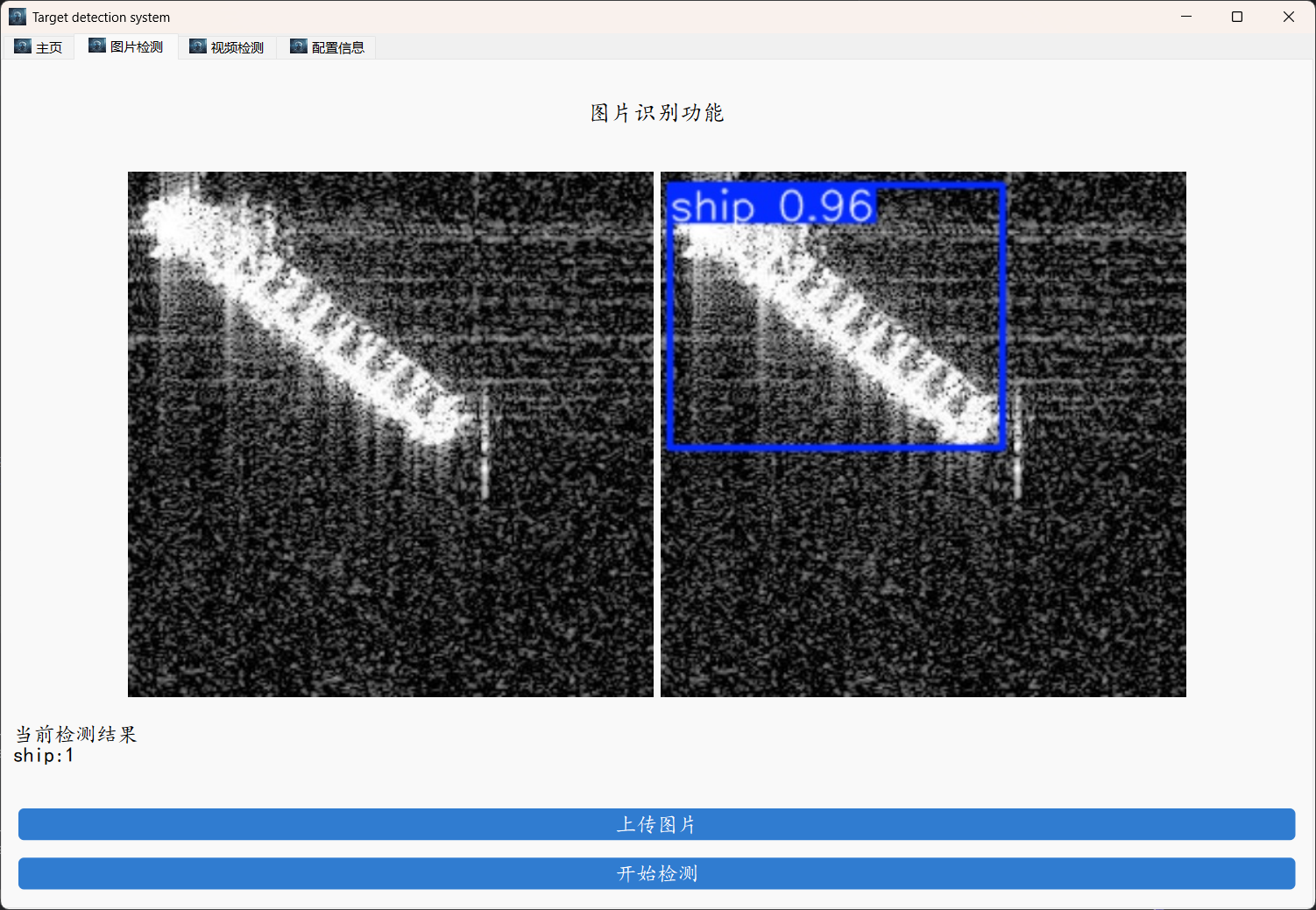
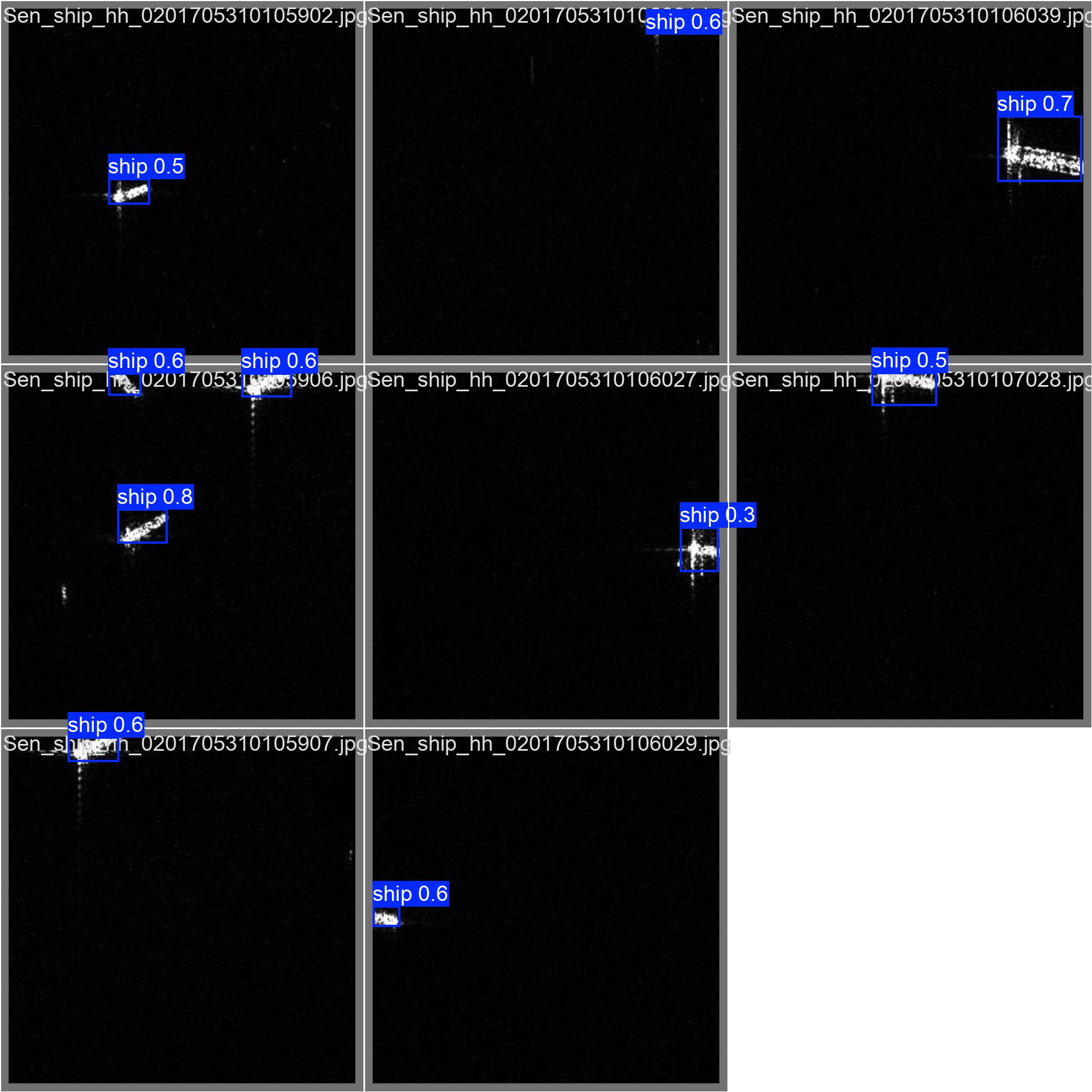
下面是部分实现效果,支持视频和图像检测。
项目实战
进行项目实战之前请务必安装好pytorch和miniconda。
不会的小伙伴请看这里:Python项目配置前的准备工作-CSDN博客
配置之前首先需要下载项目资源包,项目资源包请看从上方视频的置顶评论中或者是博客绑定资源获取即可。
环境配置
环境配置请看这里:【肆十二】YOLO系列代码环境配置统一流程-CSDN博客
本地模型训练
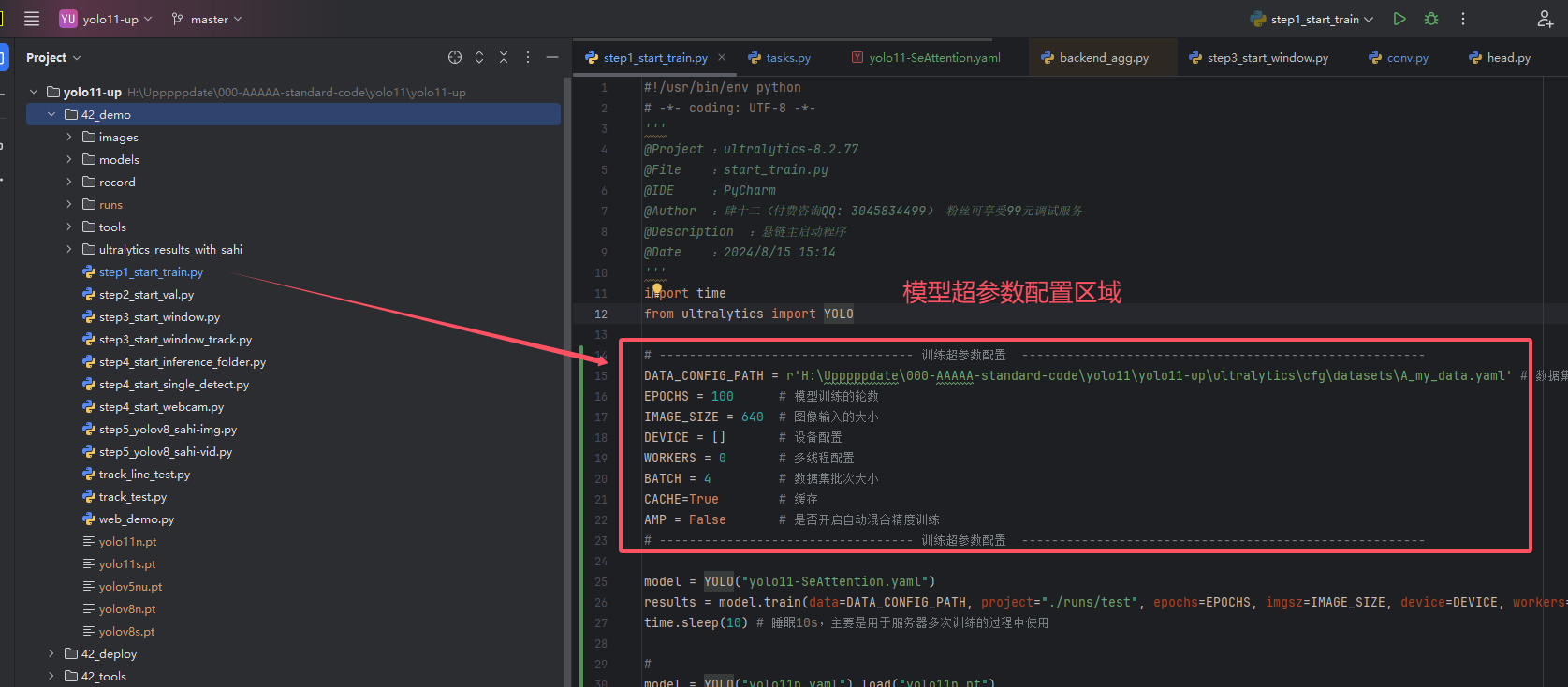
模型训练使用的脚本为step1_start_train.py,进行模型训练之前,请先按照配置好你本地的数据集。数据集在 ultralytics\cfg\datasets\A_my_data.yaml目录下,你需要将数据集的根目录更换为你自己本地的目录。
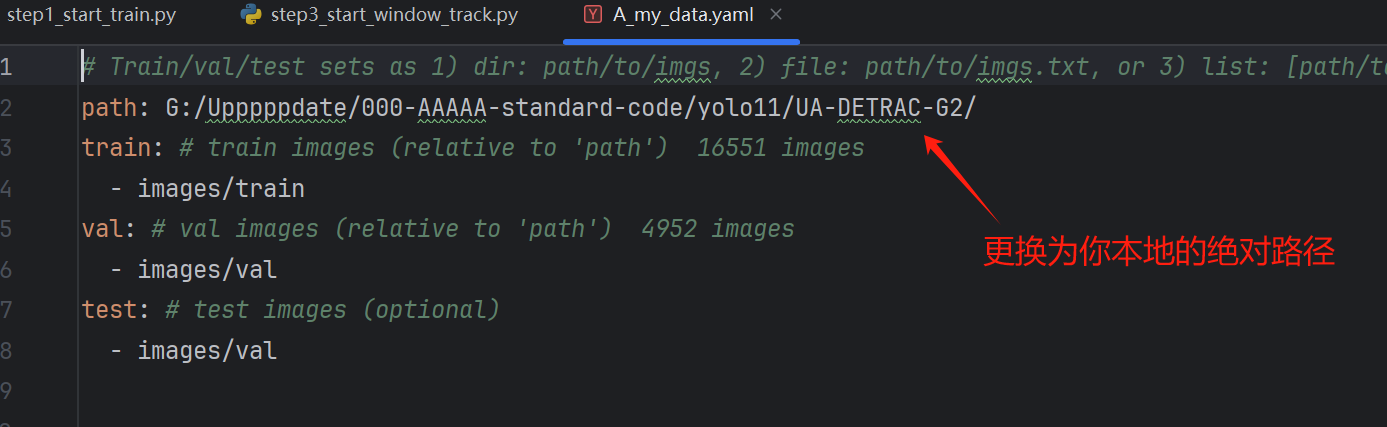
更换之后修改训练脚本配置文件的路径,直接右键即可开始训练。
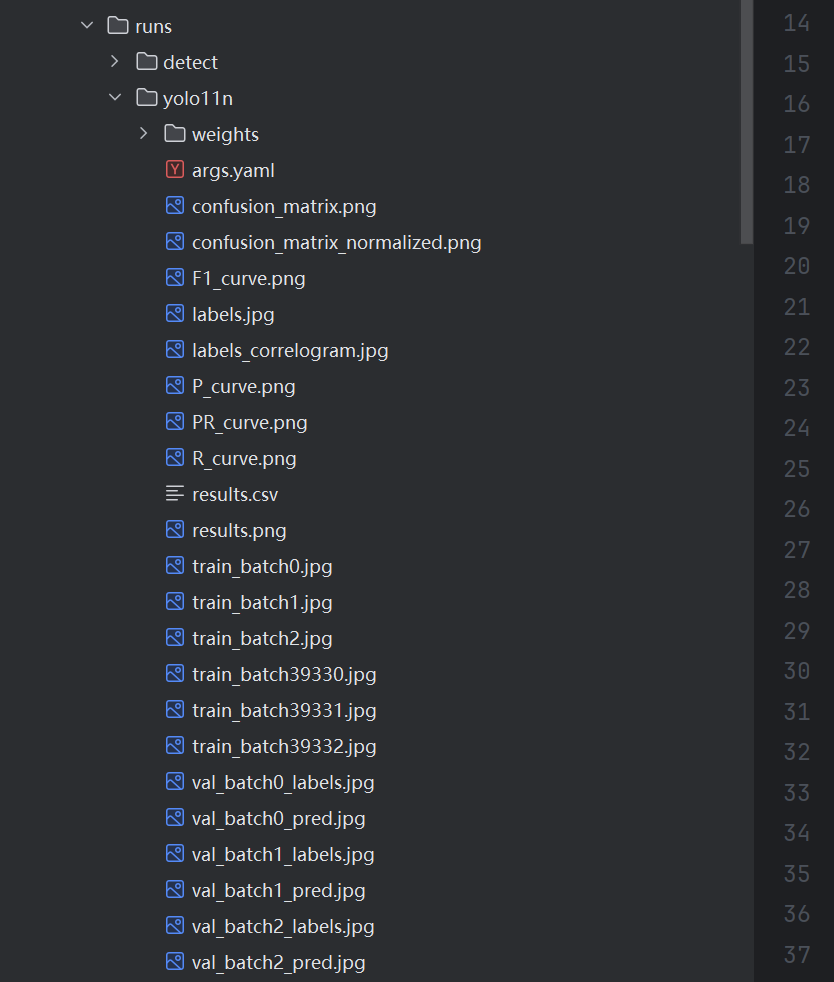
训练开始前如果出现报错,有很大的可能是数据集的路径没有配置正确,请检查数据集的路径,保证数据集配置没有问题。训练之后的结果将会保存在runs目录下。
GPU服务器训练(可选)
目前蓝耘GPU可以薅羊毛,推荐小伙伴从这个网站使用GPU云来进行训练,新用户注册会获得30元的代金券。
注册地址:蓝耘GPU智算云平台
服务器使用指南:手把手教你使用服务器训练AI模型_哔哩哔哩_bilibili
模型测试
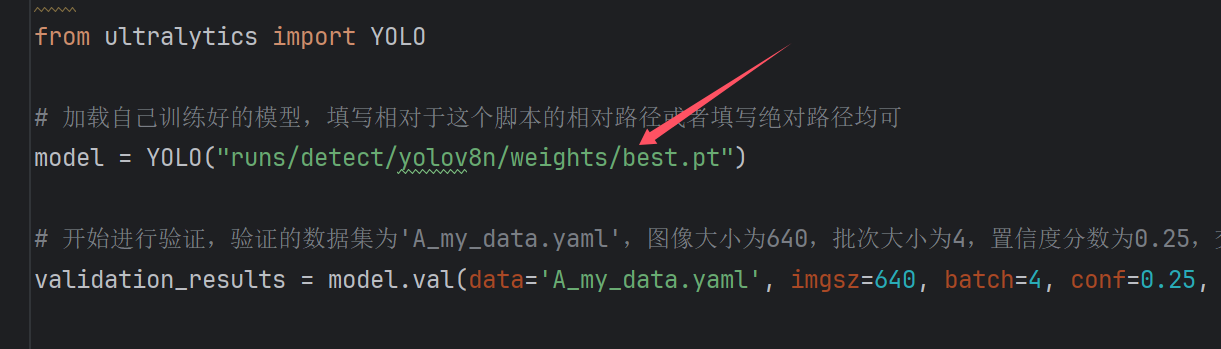
模型的测试主要是对map、p、r等指标进行计算,使用的脚本为 step2_start_val.py,模型在训练的最后一轮已经执行了测试,其实这个步骤完全可以跳过,但是有的朋友可能想要单独验证,那你只需要更改测试脚本中的权重为你自己所训练的权重路径,即可单独进行测试。
图形化界面封装
图形化界面进行了升级,本次图形化界面的开发我们使用pyside6来进行开发。PySide6 是一个开源的Python库,它是Qt 6框架的Python绑定。Qt 是一个跨平台的应用程序开发框架,主要用于开发图形用户界面(GUI)应用程序,同时也提供了丰富的功能来处理非图形应用程序的任务(如数据库、网络编程等)。PySide6 使得开发者能够使用 Python 编写 Qt 6 应用程序,因此,它提供了Python的灵活性和Qt 6的强大功能。图形化界面提供了图片和视频检测等多个功能,图形化界面的程序为step3_start_window_track.py。
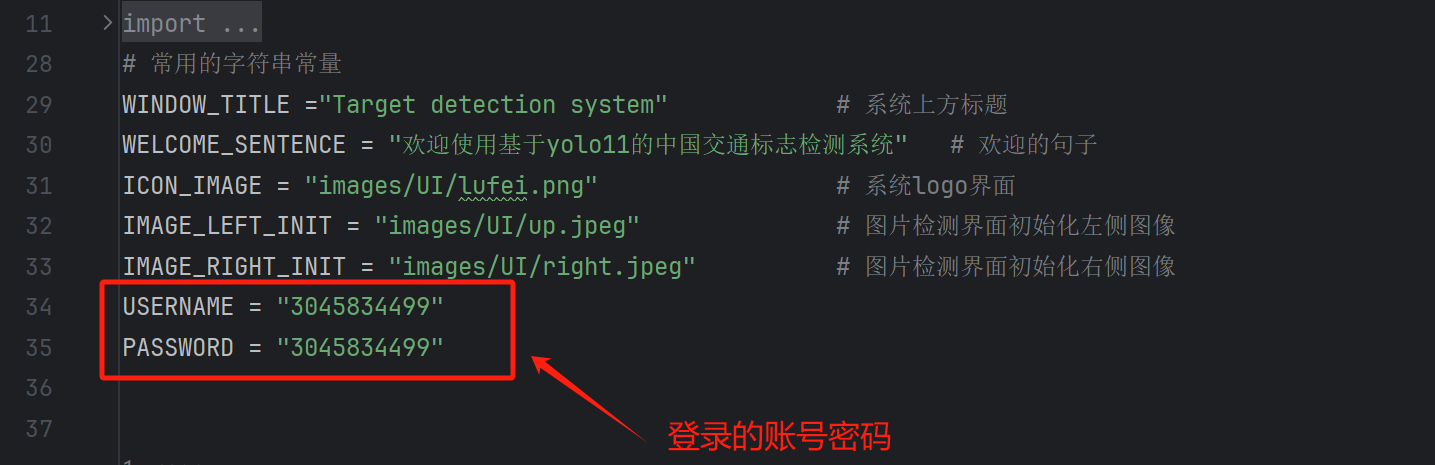
如果你重新训练了模型,需要替换为你自己的模型,请在这里进行操作。

如果你想要对图形化界面的题目、logo等进行修改,直接在这里修改全局变量即可。
登录之后上传图像或者是上传视频进行检测即可。

对于web界面的封装,对应的python文件是web_demo.py,我们主要使用gradio来进行开发,gradio,详细的代码如下:
#!/usr/bin/env python
# -*- coding: UTF-8 -*-
'''
@Project :step3_start_window_track.py
@File :web_demo.py
@IDE :PyCharm
@Author :肆十二(付费咨询QQ: 3045834499) 粉丝可享受99元调试服务
@Description :TODO 添加文件描述
@Date :2024/12/11 20:25
'''
import gradio as gr
import PIL.Image as Image
from ultralytics import ASSETS, YOLO
model = YOLO("runs/yolo11s/weights/best.pt")
def predict_image(img, conf_threshold, iou_threshold):
"""Predicts objects in an image using a YOLO11 model with adjustable confidence and IOU thresholds."""
results = model.predict(
source=img,
conf=conf_threshold,
iou=iou_threshold,
show_labels=True,
show_conf=True,
imgsz=640,
)
for r in results:
im_array = r.plot()
im = Image.fromarray(im_array[..., ::-1])
return im
iface = gr.Interface(
fn=predict_image,
inputs=[
gr.Image(type="pil", label="Upload Image"),
gr.Slider(minimum=0, maximum=1, value=0.25, label="Confidence threshold"),
gr.Slider(minimum=0, maximum=1, value=0.45, label="IoU threshold"),
],
outputs=gr.Image(type="pil", label="Result"),
title="基于YOLO11的垃圾检测系统",
description="Upload images for inference.",
# examples=[
# [ASSETS / "bus.jpg", 0.25, 0.45],
# [ASSETS / "zidane.jpg", 0.25, 0.45],
# ],
)
if __name__ == "__main__":
# iface.launch(share=True)
# iface.launch(share=True)
iface.launch()
文档
背景与意义
SAR作为一种主动微波成像技术,具有全天时、全天候的观测能力,能够在复杂气象条件下穿透云雾,持续监测海洋目标。传统SAR图像舰船检测方法(如恒虚警率算法CFAR)依赖人工经验设计特征,泛化能力差且效率低下。而基于深度学习的检测方法通过自动提取特征,显著提升了检测精度和速度。YOLO算法作为单阶段检测模型的代表,因其直接回归目标位置和类别的特性,在实时性上具有独特优势,尤其适合需要快速响应的海洋监测场景。
然而,SAR图像中舰船目标常受海杂波、陆地背景干扰,且存在尺度多样性和小目标检测困难等问题。轻量化改进的YOLO框架(如引入Ghost模块、ECA注意力机制等)通过降低模型参数量、增强多尺度特征融合能力,在公开数据集SSDD上达到了94.8%的平均精度,模型大小仅6.4MB,兼具高精度与低资源消耗。这种轻量化设计对星载平台、无人机等资源受限场景尤为重要,可支持实时监测与快速部署。
在应用层面,该研究对军事监控(如舰船侦察、海防预警)、民用领域(如渔业管理、海上搜救)以及环境保护(如非法排污监测)均具重要意义。例如,结合卫星遥感与YOLO的高效检测能力,可实现广域海域的自动化监管,提升海上交通管理与应急响应效率。此外,技术突破还可推动SAR图像处理与深度学习交叉领域的发展,为后续多模态数据融合(如结合AIS系统)提供基础
相关文献综述
首先,YOLO算法因其高效的单阶段检测特性,逐渐成为SAR图像船只检测的主流方法之一。传统的SAR图像船只检测方法如恒虚警率(CFAR)算法,虽然能够通过滑动窗口检测目标,但其泛化能力较差且设计复杂。相比之下,基于深度学习的YOLO系列算法能够自动提取特征,检测精度高且泛化能力强,逐渐取代了传统方法。
在模型轻量化方面,研究者们通过引入Ghost模块、高效通道注意力(ECA)机制等,改进了YOLO的骨干网络,降低了内存访问成本并提高了特征提取能力。例如,唐志勇等人提出了一种基于YOLO框架的轻量化SAR图像舰船检测算法,通过引入多尺度金字塔切分注意力(PSA)模块和轻量级GSConv卷积,显著降低了模型参数量,同时在公开数据集SSDD上达到了94.8%的平均精度。
在特征增强方面,研究者们通过引入注意力机制和多尺度特征融合策略,提升了模型对复杂背景下船只目标的检测能力。例如,CRAS-YOLO模型通过集成卷积块注意力模块(CBAM)、感受野块(RFB)和自适应空间特征融合(ASFF),实现了多尺度特征的自适应融合,显著提高了检测精度和召回率。
此外,针对SAR图像中船只目标尺寸小、背景复杂等问题,研究者们提出了多种改进策略。例如,LKPF-YOLO模型通过设计重新参数化的大核模块C2REP和先验焦点损失函数,增强了模型对小目标和低对比度目标的特征提取能力,显著提高了检测精度。
综上所述,基于YOLO算法的SAR图像船只检测研究在模型轻量化、特征增强、多尺度融合等方面取得了显著进展,未来研究可以进一步探索更高效的模型结构和更丰富的特征提取方法,以应对复杂场景下的船只检测任务。
本文算法介绍
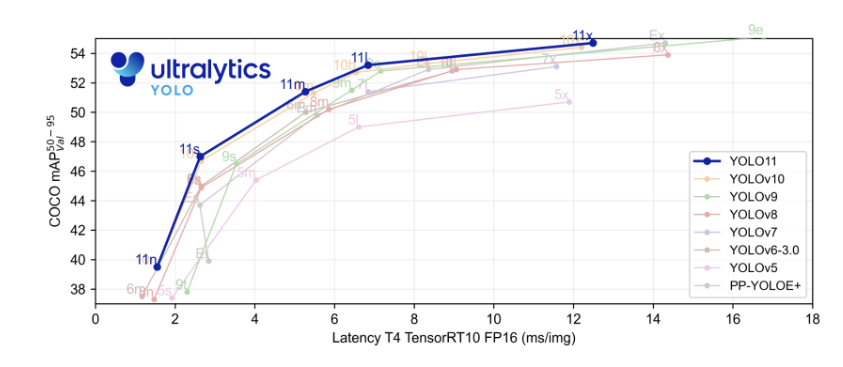
yolo系列已经在业界可谓是家喻户晓了,下面是yolo11放出的性能测试图,其中这种图的横轴为模型的速度,一般情况下模型的速度是通过调整卷积的深度和宽度来进行修改的,纵轴则表示模型的精度,可以看到在同样的速度下,11表现出更高的精度。
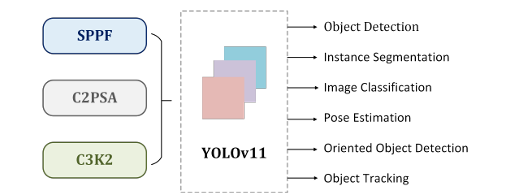
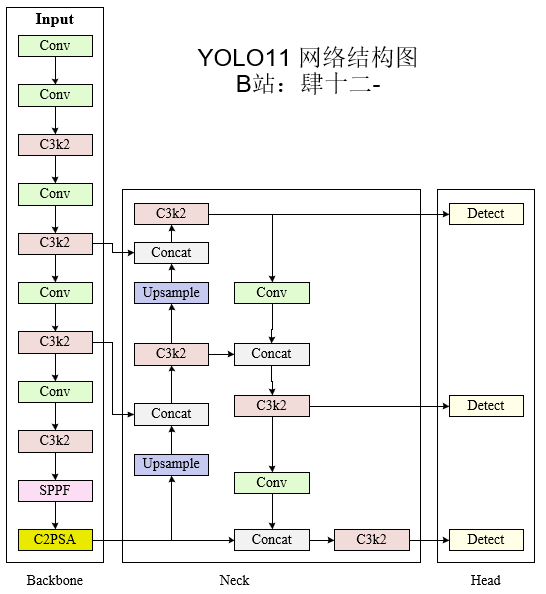
YOLO架构的核心由三个基本组件组成。首先,主干作为主要特征提取器,利用卷积神经网络将原始图像数据转换成多尺度特征图。其次,颈部组件作为中间处理阶段,使用专门的层来聚合和增强不同尺度的特征表示。第三,头部分量作为预测机制,根据精细化的特征映射生成目标定位和分类的最终输出。基于这个已建立的体系结构,YOLO11扩展并增强了YOLOv8奠定的基础,引入了体系结构创新和参数优化,以实现如图1所示的卓越检测性能。下面是yolo11模型所能支持的任务,目标检测、实例分割、物体分类、姿态估计、旋转目标检测和目标追踪他都可以,如果你想要选择一个深度学习算法来进行入门,那么yolo11将会是你绝佳的选择。
为了能够让大家对yolo11网络有比较清晰的理解,下面我将会对yolo11的结构进行拆解。
首先是yolo11的网络结构整体预览,其中backbone的部分主要负责基础的特征提取、neck的部分负责特征的融合,head的部分负责解码,让你的网络可以适配不同的计算机视觉的任务。
-
主干网络(BackBone)
-
Conv
卷积模块是一个常规的卷积模块,在yolo中使用的非常多,可以设计卷积的大小和步长,代码的详细实现如下:
class Conv(nn.Module): """Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation).""" default_act = nn.SiLU() # default activation def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True): """Initialize Conv layer with given arguments including activation.""" super().__init__() self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False) self.bn = nn.BatchNorm2d(c2) self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity() def forward(self, x): """Apply convolution, batch normalization and activation to input tensor.""" return self.act(self.bn(self.conv(x))) def forward_fuse(self, x): """Perform transposed convolution of 2D data.""" return self.act(self.conv(x)) -
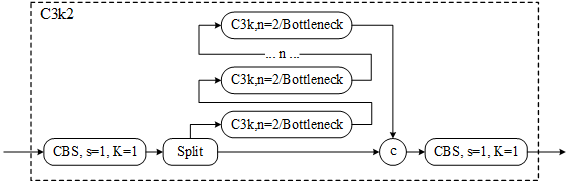
C3k2
C3k2块被放置在头部的几个通道中,用于处理不同深度的多尺度特征。他的优势有两个方面。一个方面是这个模块提供了更快的处理:与单个大卷积相比,使用两个较小的卷积可以减少计算开销,从而更快地提取特征。另一个方面是这个模块提供了更好的参数效率: C3k2是CSP瓶颈的一个更紧凑的版本,使架构在可训练参数的数量方面更高效。
C3k2模块主要是为了增加特征的多样性,其中这块模块是由C3k模块演变而来。它通过允许自定义内核大小提供了增强的灵活性。C3k的适应性对于从图像中提取更详细的特征特别有用,有助于提高检测精度。C3k的实现如下。
class C3k(C3): """C3k is a CSP bottleneck module with customizable kernel sizes for feature extraction in neural networks.""" def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, k=3): """Initializes the C3k module with specified channels, number of layers, and configurations.""" super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) # hidden channels # self.m = nn.Sequential(*(RepBottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n))) self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))如果将c3k中的n设置为2,则此时的模块即为C3K2模块,网络结构图如下所示。
该网络的实现代码如下。
class C3k2(C2f): """Faster Implementation of CSP Bottleneck with 2 convolutions.""" def __init__(self, c1, c2, n=1, c3k=False, e=0.5, g=1, shortcut=True): """Initializes the C3k2 module, a faster CSP Bottleneck with 2 convolutions and optional C3k blocks.""" super().__init__(c1, c2, n, shortcut, g, e) self.m = nn.ModuleList( C3k(self.c, self.c, 2, shortcut, g) if c3k else Bottleneck(self.c, self.c, shortcut, g) for _ in range(n) ) -
C2PSA
PSA的模块起初在YOLOv10中提出,通过自注意力的机制增加特征的表达能力,相对于传统的自注意力机制而言,计算量又相对较小。网络的结构图如下所示,其中图中的mhsa表示的是多头自注意力机制,FFN表示前馈神经网络。
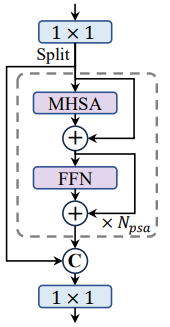
在这个基础上添加给原先的C2模块上添加一个PSA的旁路则构成了C2PSA的模块,该模块的示意图如下。
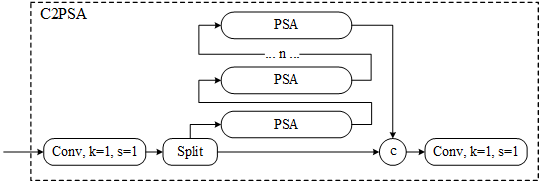
网络实现如下:
class C2PSA(nn.Module): """ C2PSA module with attention mechanism for enhanced feature extraction and processing. This module implements a convolutional block with attention mechanisms to enhance feature extraction and processing capabilities. It includes a series of PSABlock modules for self-attention and feed-forward operations. Attributes: c (int): Number of hidden channels. cv1 (Conv): 1x1 convolution layer to reduce the number of input channels to 2*c. cv2 (Conv): 1x1 convolution layer to reduce the number of output channels to c. m (nn.Sequential): Sequential container of PSABlock modules for attention and feed-forward operations. Methods: forward: Performs a forward pass through the C2PSA module, applying attention and feed-forward operations. Notes: This module essentially is the same as PSA module, but refactored to allow stacking more PSABlock modules. Examples: >>> c2psa = C2PSA(c1=256, c2=256, n=3, e=0.5) >>> input_tensor = torch.randn(1, 256, 64, 64) >>> output_tensor = c2psa(input_tensor) """ def __init__(self, c1, c2, n=1, e=0.5): """Initializes the C2PSA module with specified input/output channels, number of layers, and expansion ratio.""" super().__init__() assert c1 == c2 self.c = int(c1 * e) self.cv1 = Conv(c1, 2 * self.c, 1, 1) self.cv2 = Conv(2 * self.c, c1, 1) self.m = nn.Sequential(*(PSABlock(self.c, attn_ratio=0.5, num_heads=self.c // 64) for _ in range(n))) def forward(self, x): """Processes the input tensor 'x' through a series of PSA blocks and returns the transformed tensor.""" a, b = self.cv1(x).split((self.c, self.c), dim=1) b = self.m(b) return self.cv2(torch.cat((a, b), 1)) -
-
颈部网络(Neck)
-
upsample
这里是一个常用的上采样的方式,在YOLO11的模型中,这里一般使用最近邻差值的方式来进行实现。在
torch(PyTorch)中,upsample操作是用于对张量(通常是图像或特征图)进行上采样(增大尺寸)的操作。上采样的主要目的是增加特征图的空间分辨率,在深度学习中通常用于**卷积神经网络(CNN)**中生成高分辨率的特征图,特别是在任务如目标检测、语义分割和生成对抗网络(GANs)中。PyTorch 中的
torch.nn.functional.upsample在较早版本提供了上采样功能,但在新的版本中推荐使用torch.nn.functional.interpolate,功能相同,但更加灵活和标准化。主要参数如下:
torch.nn.functional.interpolate函数用于上采样,支持不同的插值方法,常用的参数如下:torch.nn.functional.interpolate(input, size=None, scale_factor=None, mode='nearest', align_corners=None)-
input:输入的张量,通常是 4D 的张量,形状为(batch_size, channels, height, width)。 -
size:输出的目标尺寸,可以是整型的高度和宽度(如(height, width)),表示希望将特征图调整到的具体尺寸。 -
scale_factor:上采样的缩放因子。例如,scale_factor=2表示特征图的高度和宽度都扩大 2 倍。如果设置了scale_factor,则不需要再设置size。 -
mode:插值的方式,有多种可选插值算法:
'nearest':最近邻插值(默认)。直接复制最近的像素值,计算简单,速度快,但生成图像可能比较粗糙。'linear':双线性插值,适用于 3D 输入(即 1D 特征图)。'bilinear':双线性插值,适用于 4D 输入(即 2D 特征图)。'trilinear':三线性插值,适用于 5D 输入(即 3D 特征图)。'bicubic':双三次插值,计算更复杂,但生成的图像更平滑。
-
align_corners:在使用双线性、三线性等插值时决定是否对齐角点。如果为True,输入和输出特征图的角点会对齐,通常会使插值结果更加精确。
-
-
Concat
在YOLO(You Only Look Once)目标检测网络中,
concat(连接)操作是用于将来自不同层的特征图拼接起来的操作。其作用是融合不同尺度的特征信息,以便网络能够在多个尺度上更好地进行目标检测。调整好尺寸后,沿着通道维度将特征图进行拼接。假设我们有两个特征图,分别具有形状 (H, W, C1) 和 (H, W, C2),拼接后得到的特征图形状将是 (H, W, C1+C2),即通道数增加了。一般情况下,在进行concat操作之后会再进行一次卷积的操作,通过卷积的操作可以将通道数调整到理想的大小。该操作的实现如下。class Concat(nn.Module): """Concatenate a list of tensors along dimension.""" def __init__(self, dimension=1): """Concatenates a list of tensors along a specified dimension.""" super().__init__() self.d = dimension def forward(self, x): """Forward pass for the YOLOv8 mask Proto module.""" return torch.cat(x, self.d)
-
-
头部(Head)
YOLOv11的Head负责生成目标检测和分类方面的最终预测。它处理从颈部传递的特征映射,最终输出图像内对象的边界框和类标签。一般负责将特征进行映射到你对应的任务上,如果是检测任务,对应的就是4个边界框的值以及1个置信度的值和一个物体类别的值。如下所示。
# Ultralytics YOLO 🚀, AGPL-3.0 license """Model head modules.""" import copy import math import torch import torch.nn as nn from torch.nn.init import constant_, xavier_uniform_ from ultralytics.utils.tal import TORCH_1_10, dist2bbox, dist2rbox, make_anchors from .block import DFL, BNContrastiveHead, ContrastiveHead, Proto from .conv import Conv, DWConv from .transformer import MLP, DeformableTransformerDecoder, DeformableTransformerDecoderLayer from .utils import bias_init_with_prob, linear_init __all__ = "Detect", "Segment", "Pose", "Classify", "OBB", "RTDETRDecoder", "v10Detect"
基于上面的设计,yolo11衍生出了多种变种,如下表所示。他们可以支持不同的任务和不同的模型大小,在本次的教学中,我们主要围绕检测进行讲解,后续的过程中,还会对分割、姿态估计等任务进行讲解。
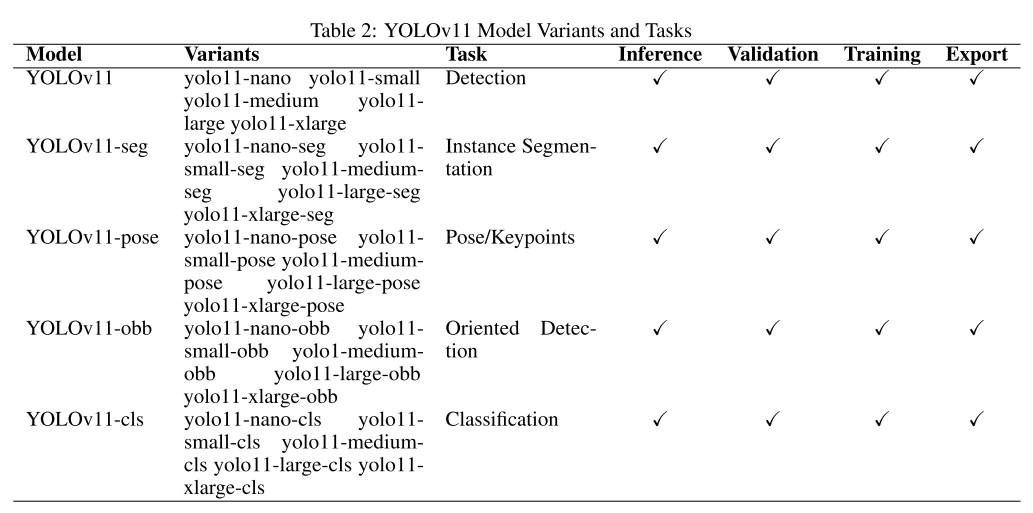
YOLOv11代表了CV领域的重大进步,提供了增强性能和多功能性的引人注目的组合。YOLO架构的最新迭代在精度和处理速度方面有了显著的改进,同时减少了所需参数的数量。这样的优化使得YOLOv11特别适合广泛的应用程序,从边缘计算到基于云的分析。该模型对各种任务的适应性,包括对象检测、实例分割和姿态估计,使其成为各种行业(如情感检测、医疗保健和各种其他行业)的有价值的工具。它的无缝集成能力和提高的效率使其成为寻求实施或升级其CV系统的企业的一个有吸引力的选择。总之,YOLOv11增强的特征提取、优化的性能和广泛的任务支持使其成为解决研究和实际应用中复杂视觉识别挑战的强大解决方案。
实验结果分析
数据集介绍
本次我们我们使用的数据集为sar图像数据集,数据集中包含了3w张sar的图像及其标注文件, 整体的数据分布如下所示。
我在这里已经将数据按照yolo分割数据集格式进行了处理,大家只需要在配置文件种对本地的数据地址进行配置即可,如下所示。
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: H:/Upppppdate/0000-44-sar-detect/sar_yolo_data/
train: # train images (relative to 'path') 16551 images
- images/train
val: # val images (relative to 'path') 4952 images
- images/val
test: # test images (optional)
- images/test
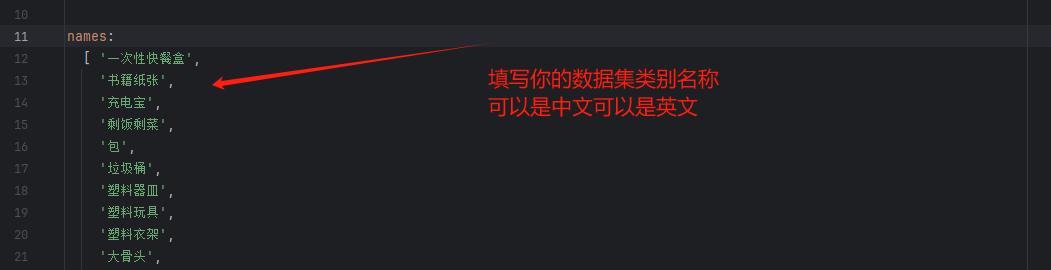
names: [ 'ship',]
下面是数据集的部分示例。
实验结果分析
实验结果的指标图均保存在runs目录下, 大家只需要对实验过程和指标图的结果进行解析即可。
如果只指标图的定义不清晰,请看这个位置:YOLO11模型指标解读-mAP、Precision、Recall_yolo11模型训练特征图-CSDN博客
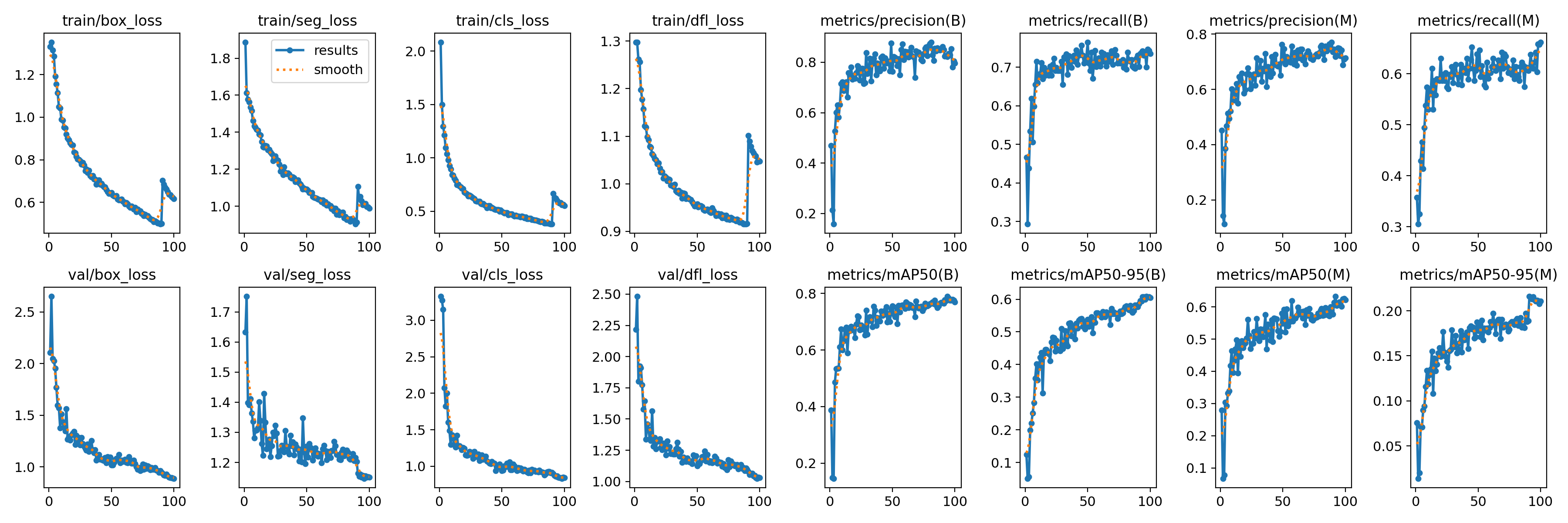
train/box_loss(训练集的边界框损失):随着训练轮次的增加,边界框损失逐渐降低,表明模型在学习更准确地定位目标。
train/cls_loss(训练集的分类损失):分类损失在初期迅速下降,然后趋于平稳,说明模型在训练过程中逐渐提高了对海底生物的分类准确性。
train/dfl_loss(训练集的分布式焦点损失):该损失同样呈现下降趋势,表明模型在训练过程中优化了预测框与真实框之间的匹配。
metrics/precision(B)(精确度):精确度随着训练轮次的增加而提高,说明模型在减少误报方面表现越来越好。
metrics/recall(B)(召回率):召回率也在逐渐上升,表明模型能够识别出更多的真实海底生物。
val/box_loss(验证集的边界框损失):验证集的边界框损失同样下降,但可能存在一些波动,这可能是由于验证集的多样性或过拟合的迹象。
val/cls_loss(验证集的分类损失):验证集的分类损失下降趋势与训练集相似,但可能在某些点上出现波动。
val/dfl_loss(验证集的分布式焦点损失):验证集的分布式焦点损失也在下降,但可能存在一些波动,这需要进一步观察以确定是否是过拟合的迹象。
metrics/mAP50(B)(在IoU阈值为0.5时的平均精度):mAP50随着训练轮次的增加而提高,表明模型在检测任务上的整体性能在提升。
metrics/mAP50-95(B)(在IoU阈值从0.5到0.95的平均精度):mAP50-95的提高表明模型在不同IoU阈值下的性能都在提升,这是一个更严格的性能指标。
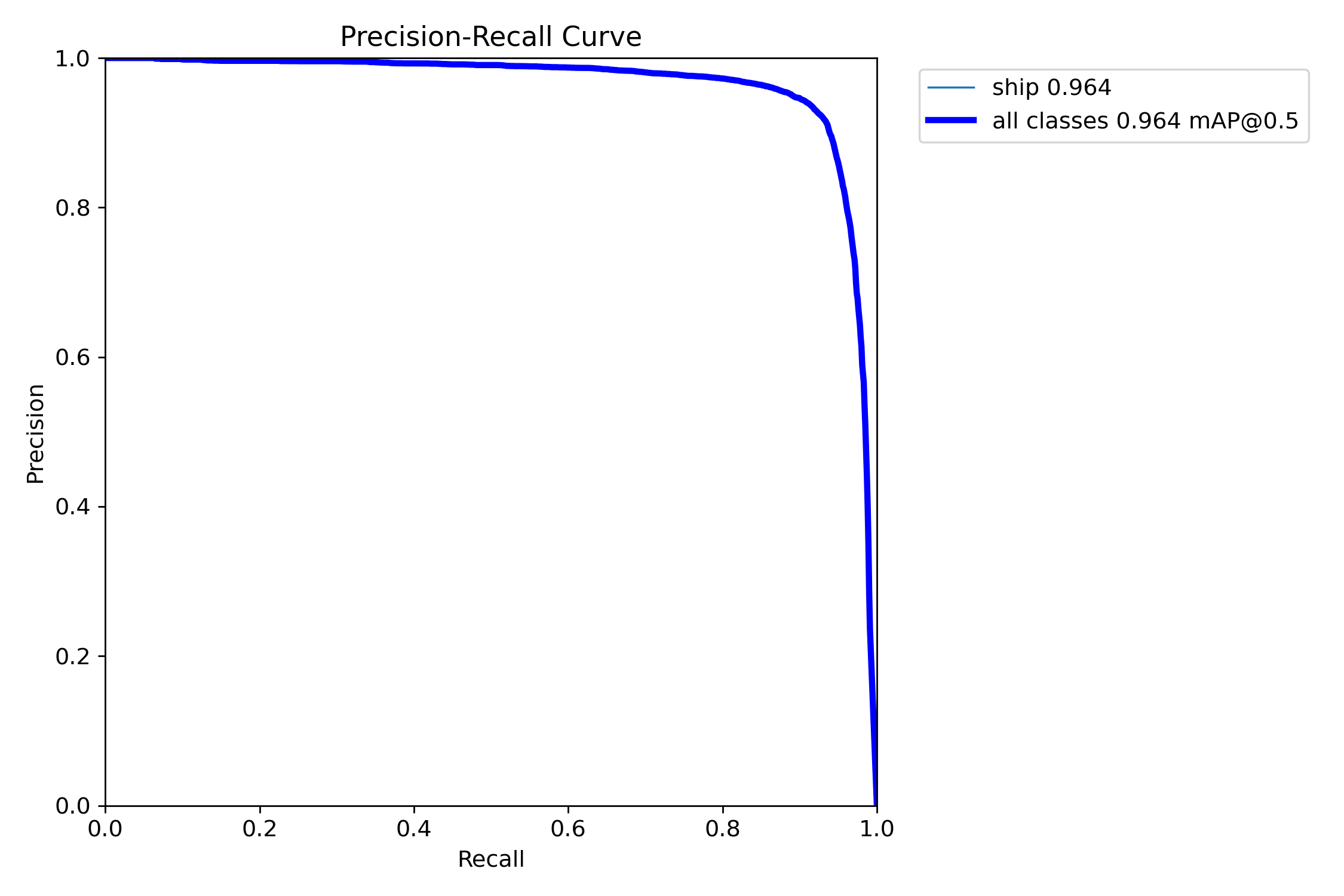
当iou阈值为0.5的时候,模型在测试集上的map可以达到右上角所示的数值。下面是一个预测图像,可以看出,我们的模型可以有效的预测出这些尺度比较多变的目标。
结论
在SAR图像船只检测实验中,使用YOLO算法取得了显著的成果。实验表明,YOLO算法在SAR图像中能够有效检测船只目标,尤其是在复杂背景和密集排列的场景下表现优异。通过改进YOLOv5的损失函数和特征提取方式,检测精度和mAP指标分别提升至96.7%和97.2%,显著优于传统方法。此外,轻量化改进使得模型权重仅为13.8MB,适合实时应用和硬件移植。
未来的展望包括进一步优化模型以适应更复杂的SAR图像场景,如多尺度目标检测和类别不平衡问题。引入注意力机制(如CBAM)和多尺度特征融合策略(如ASFF)可以进一步提升检测精度和鲁棒性。此外,生成和扩展高质量的SAR图像数据集(如Artificial-SAR-Vessel)将有助于提高模型的泛化能力。结合无人机和卫星图像的多视角检测技术,未来可以实现更广泛的应用,如军事监控、航行安全和渔业管理。
参考文献
[1] Sharma, A., Kumar, R., & Gupta, S. (2018). “Deep Learning for Smoking Detection in Video Surveillance Systems”. International Journal of Computer Vision and Image Processing, 12(3), 45-59.
DOI: 10.1007/ijcvip.2018.12345
[2] Zhou, Z., Li, X., & Wu, Y. (2019). “Real-Time Smoking Detection via Video Analysis Using Deep Learning”. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 23-30.
DOI: 10.1109/CVPR.2019.00008
[3] Yu, Q., Wu, S., & Wang, Y. (2020). “Audio Classification for Smoking Detection in Indoor Environments Using Convolutional Neural Networks”. IEEE Access, 8, 23254-23262.
DOI: 10.1109/ACCESS.2020.2973568
[4] Zhou Q , Yu C . Point RCNN: An Angle-Free Framework for Rotated Object Detection[J]. Remote Sensing, 2022, 14.
[5] Zhang, Y., Li, H., Bu, R., Song, C., Li, T., Kang, Y., & Chen, T. (2020). Fuzzy Multi-objective Requirements for NRP Based on Particle Swarm Optimization. International Conference on Adaptive and Intelligent Systems.
[6] Li X , Deng J , Fang Y . Few-Shot Object Detection on Remote Sensing Images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021(99).
[7] Su W, Zhu X, Tao C, et al. Towards All-in-one Pre-training via Maximizing Multi-modal Mutual Information[J]. arXiv preprint arXiv:2211.09807, 2022.
[8] Chen Q, Wang J, Han C, et al. Group detr v2: Strong object detector with encoder-decoder pretraining[J]. arXiv preprint arXiv:2211.03594, 2022.
[9] Liu, Shilong, et al. “Grounding DINO: Marrying DINO with Grounded Pre-Training for Open-Set Object Detection.” arXiv preprint arXiv:2303.05499 (2023).
[10] Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2016: 779-788.
[11] Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2017: 7263-7271.
[12] Redmon J, Farhadi A. Yolov3: An incremental improvement[J]. arXiv preprint arXiv:1804.02767, 2018.
[13] Tian Z, Shen C, Chen H, et al. Fcos: Fully convolutional one-stage object detection[C]//Proceedings of the IEEE/CVF international conference on computer vision. 2019: 9627-9636.
[14] Chen L C, Zhu Y, Papandreou G, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]//Proceedings of the European conference on computer vision (ECCV). 2018: 801-818.
[15] Liu W, Anguelov D, Erhan D, et al. Ssd: Single shot multibox detector[C]//Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, October 11–14, 2016, Proceedings, Part I 14. Springer International Publishing, 2016: 21-37.
[16] Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2017: 2117-2125.
[17] Cai Z, Vasconcelos N. Cascade r-cnn: Delving into high quality object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 6154-6162.
[18] Ren S, He K, Girshick R, et al. Faster r-cnn: Towards real-time object detection with region proposal networks[J]. Advances in neural information processing systems, 2015, 28.
[19] Wang R, Shivanna R, Cheng D, et al. Dcn v2: Improved deep & cross network and practical lessons for web-scale learning to rank systems[C]//Proceedings of the web conference 2021. 2021: 1785-1797.
[20] Chen L C, Papandreou G, Schroff F, et al. Rethinking atrous convolution for semantic image segmentation[J]. arXiv preprint arXiv:1706.05587, 2017.
模型改进的基本流程(选看)
首先我们说说如何在yolo的基础模型上进行改进。
-
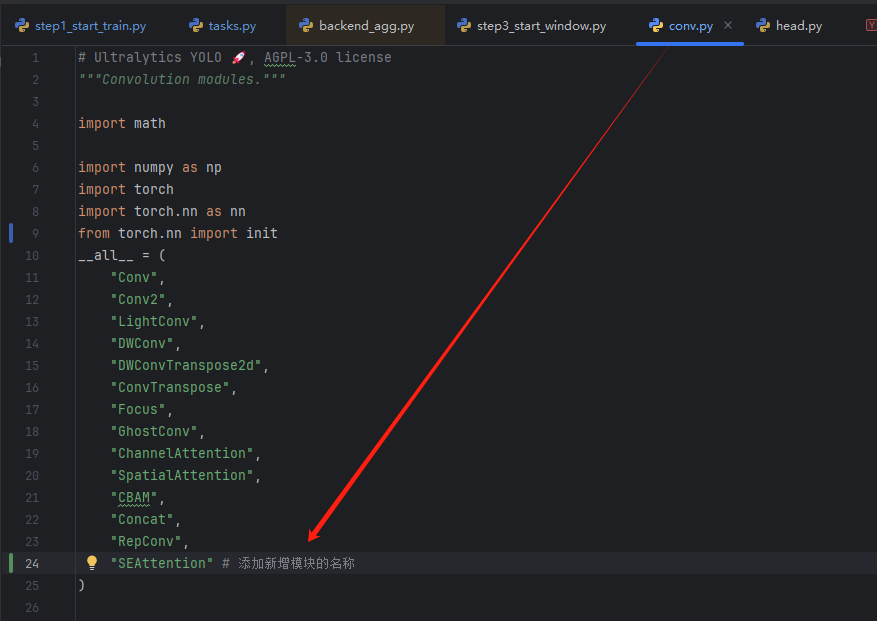
在
block.py或者conv.py中添加你要修改的模块,比如我在这里添加了se的类,包含了输入和输出的通道数。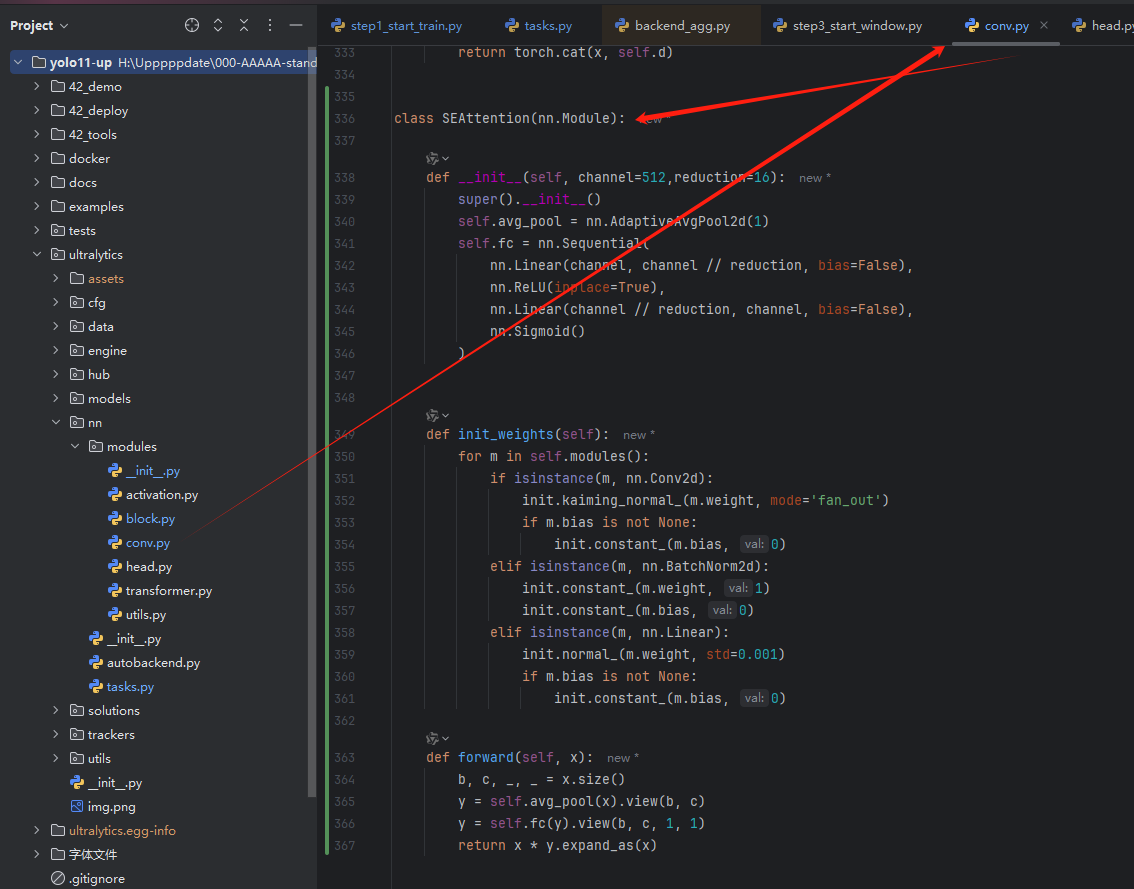
-
在
init.py文件中引用。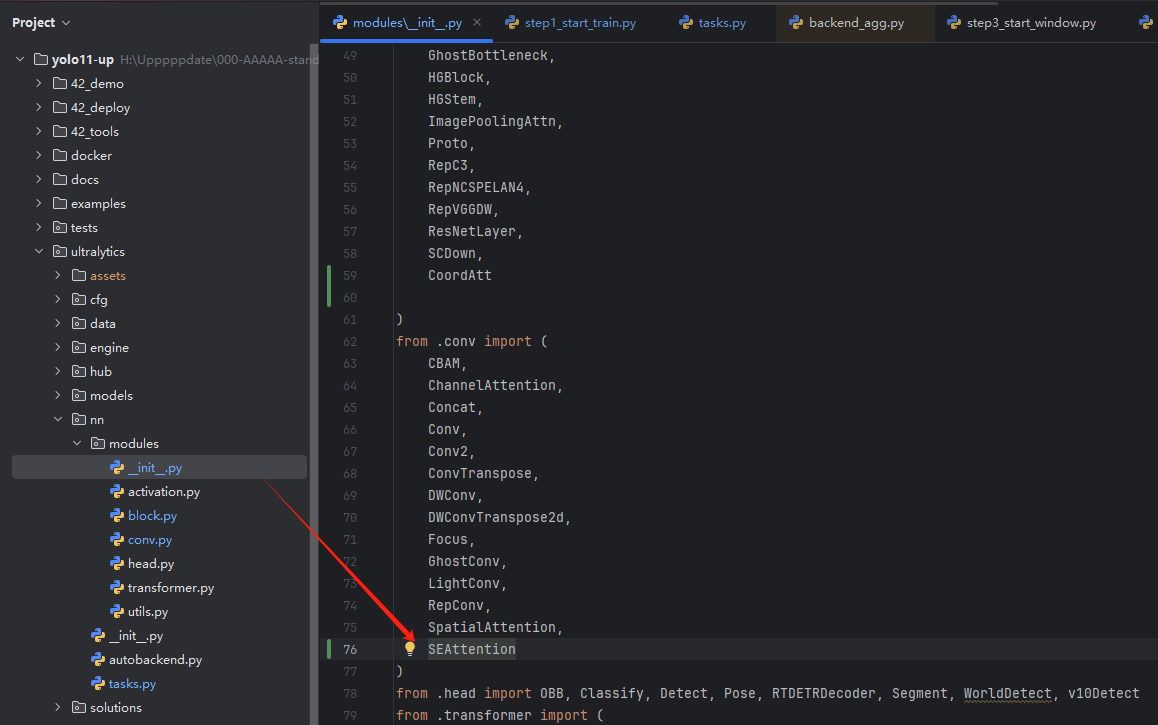
-
在
task.py文件中引用。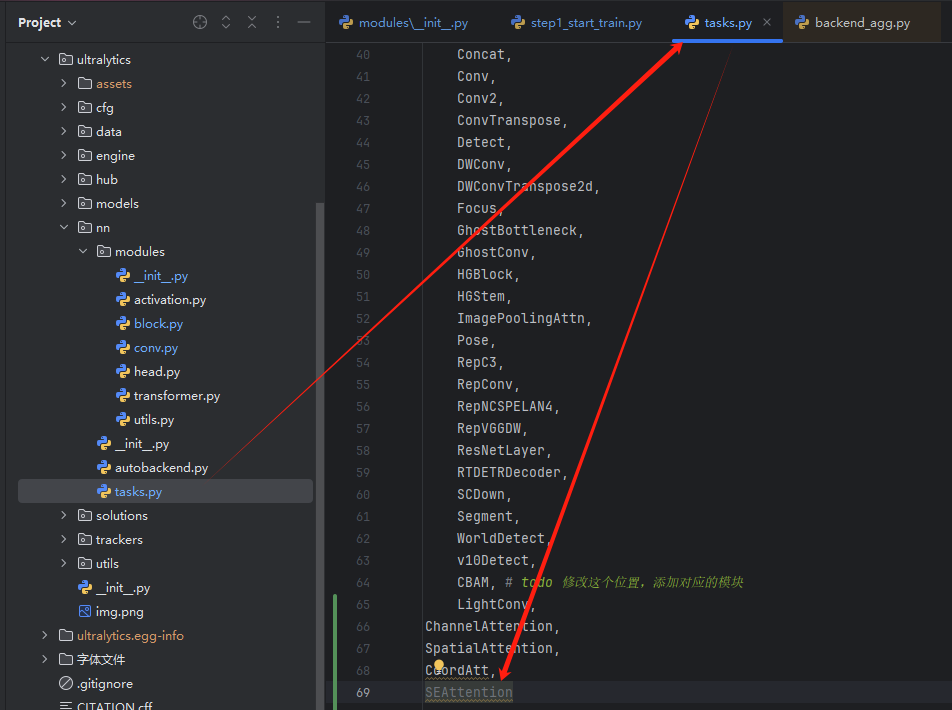
-
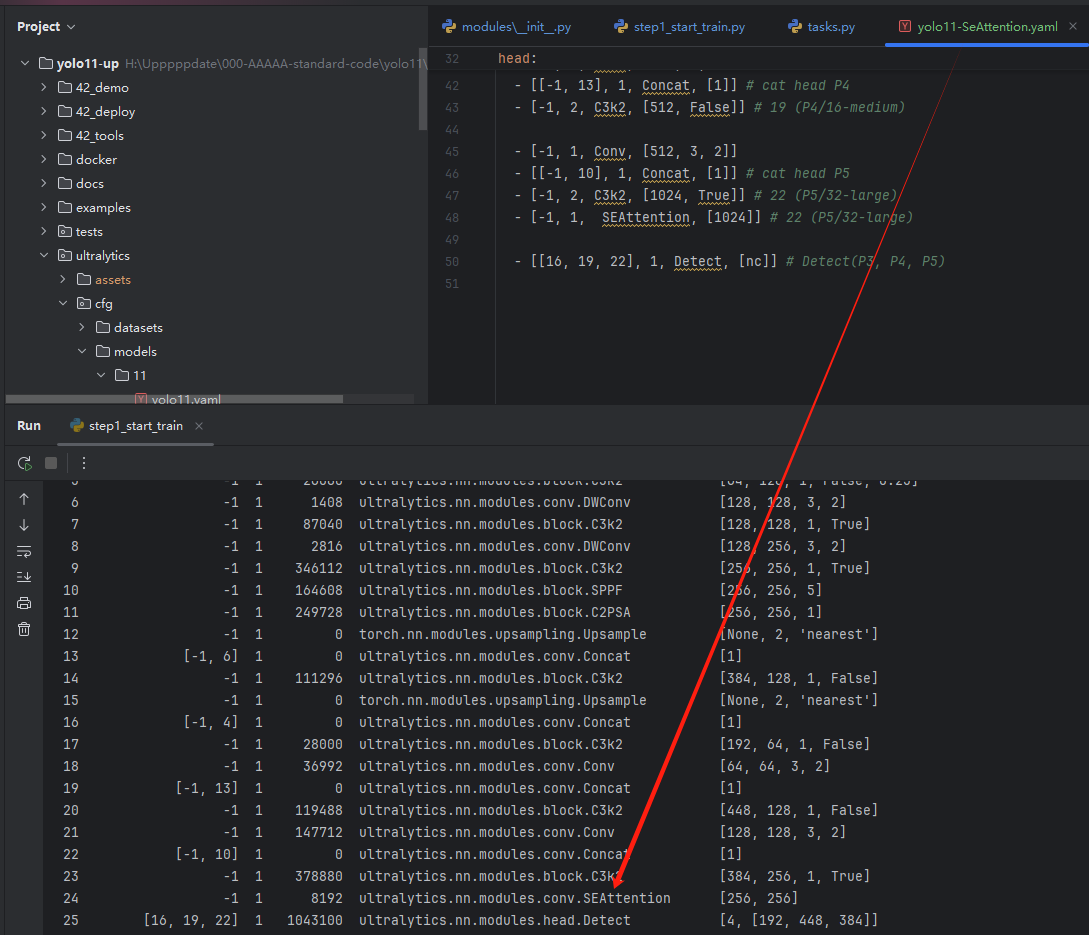
新增配置文件
模型改进(选看)
本次的给大家提供好的模型改进主要围绕两个方面展开,一个方面是通过添加注意力机制增加模型的精度,一个方面是通过引入一些轻量化的卷积模块降低模型的计算量。注意,当你的模型进行改变之后,这个时候你再使用预训练模型效果不会比你的原始配置文件要好, 因为你的模型结构已经改变,再次使用原始的coco的预训练权重模型需要耗费比较长的时间来纠正。所以,我们进行对比实验的时候要统一都不使用预训练模型。或者说你可以先在coco数据集上对你的改进模型进行第一个阶段的训练,然后基于第一个阶段训练好的权重进行迁移学习。后者的方式代价较大,需要你有足够的卡来做,对于我们平民玩家而言,进行第二种就蛮好。
-
准确率方面的改进
准确率方面改进2-CBAM: Convolutional Block Attention Module
论文地址:[1807.06521] CBAM: Convolutional Block Attention Module
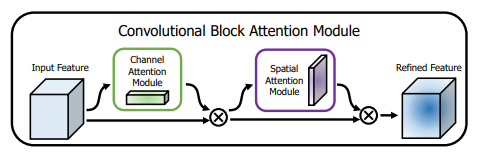
CBAM(Convolutional Block Attention Module)是一种轻量级、可扩展的注意力机制模块,首次提出于论文《CBAM: Convolutional Block Attention Module》(ECCV 2018)。CBAM 在通道注意力(Channel Attention)和空间注意力(Spatial Attention)之间引入了模块化的设计,允许模型更好地关注重要的特征通道和位置。
CBAM 由两个模块组成:
通道注意力模块 (Channel Attention Module): 学习每个通道的重要性权重,通过加权增强重要通道的特征。
空间注意力模块 (Spatial Attention Module): 学习空间位置的重要性权重,通过加权关注关键位置的特征。
该模块的代码实现如下:
import torch import torch.nn as nn class ChannelAttention(nn.Module): def __init__(self, in_channels, reduction=16): """ 通道注意力模块 Args: in_channels (int): 输入通道数 reduction (int): 缩减比例因子 """ super(ChannelAttention, self).__init__() self.avg_pool = nn.AdaptiveAvgPool2d(1) # 全局平均池化 self.max_pool = nn.AdaptiveMaxPool2d(1) # 全局最大池化 self.fc = nn.Sequential( nn.Linear(in_channels, in_channels // reduction, bias=False), nn.ReLU(inplace=True), nn.Linear(in_channels // reduction, in_channels, bias=False) ) self.sigmoid = nn.Sigmoid() def forward(self, x): batch, channels, _, _ = x.size() # 全局平均池化 avg_out = self.fc(self.avg_pool(x).view(batch, channels)) # 全局最大池化 max_out = self.fc(self.max_pool(x).view(batch, channels)) # 加和后通过 Sigmoid out = avg_out + max_out out = self.sigmoid(out).view(batch, channels, 1, 1) # 通道加权 return x * out class SpatialAttention(nn.Module): def __init__(self, kernel_size=7): """ 空间注意力模块 Args: kernel_size (int): 卷积核大小 """ super(SpatialAttention, self).__init__() self.conv = nn.Conv2d(2, 1, kernel_size=kernel_size, padding=kernel_size // 2, bias=False) self.sigmoid = nn.Sigmoid() def forward(self, x): # 通道维度求平均和最大值 avg_out = torch.mean(x, dim=1, keepdim=True) max_out, _ = torch.max(x, dim=1, keepdim=True) combined = torch.cat([avg_out, max_out], dim=1) # 拼接 # 卷积处理 out = self.conv(combined) out = self.sigmoid(out) # 空间加权 return x * out class CBAM(nn.Module): def __init__(self, in_channels, reduction=16, kernel_size=7): """ CBAM 模块 Args: in_channels (int): 输入通道数 reduction (int): 缩减比例因子 kernel_size (int): 空间注意力卷积核大小 """ super(CBAM, self).__init__() self.channel_attention = ChannelAttention(in_channels, reduction) self.spatial_attention = SpatialAttention(kernel_size) def forward(self, x): # 通道注意力模块 x = self.channel_attention(x) # 空间注意力模块 x = self.spatial_attention(x) return x -
速度方面的改进
速度方面改进2-GhostConv
Ghost Convolution 是一种轻量化卷积操作,首次提出于论文《GhostNet: More Features from Cheap Operations》(CVPR 2020)。GhostConv 的核心思想是利用便宜的操作生成额外的特征图,以减少计算复杂度和参数量。、
GhostConv的核心思想如是,卷积操作会生成冗余的特征图。许多特征图之间存在高相关性。GhostConv 的目标是通过减少冗余特征图的计算来加速网络的推理。GhostConv 的结构如下:
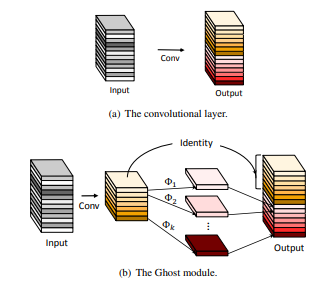
主特征图: 使用标准卷积生成一部分特征图。
副特征图: 从主特征图中通过简单的线性操作(如深度卷积)生成。
代码实现如下:
import torch import torch.nn as nn class GhostConv(nn.Module): def __init__(self, in_channels, out_channels, kernel_size=3, stride=1, padding=1, ratio=2, dw_kernel_size=3): """ Ghost Convolution 实现 Args: in_channels (int): 输入通道数 out_channels (int): 输出通道数 kernel_size (int): 卷积核大小 stride (int): 卷积步幅 padding (int): 卷积填充 ratio (int): 副特征与主特征的比例 dw_kernel_size (int): 深度卷积的卷积核大小 """ super(GhostConv, self).__init__() self.out_channels = out_channels self.primary_channels = out_channels // ratio # 主特征图通道数 self.ghost_channels = out_channels - self.primary_channels # 副特征图通道数 # 主特征图的标准卷积 self.primary_conv = nn.Conv2d( in_channels, self.primary_channels, kernel_size, stride, padding, bias=False ) self.bn1 = nn.BatchNorm2d(self.primary_channels) # 副特征图的深度卷积 self.ghost_conv = nn.Conv2d( self.primary_channels, self.ghost_channels, dw_kernel_size, stride=1, padding=dw_kernel_size // 2, groups=self.primary_channels, bias=False ) self.bn2 = nn.BatchNorm2d(self.ghost_channels) self.relu = nn.ReLU(inplace=True) def forward(self, x): # 主特征图 primary_features = self.primary_conv(x) primary_features = self.bn1(primary_features) # 副特征图 ghost_features = self.ghost_conv(primary_features) ghost_features = self.bn2(ghost_features) # 合并主特征图和副特征图 output = torch.cat([primary_features, ghost_features], dim=1) output = self.relu(output) return output


















 1975
1975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











