






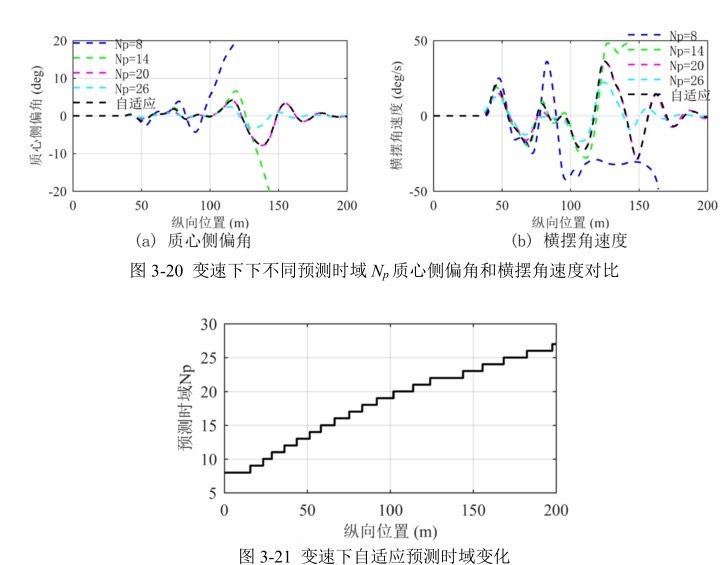
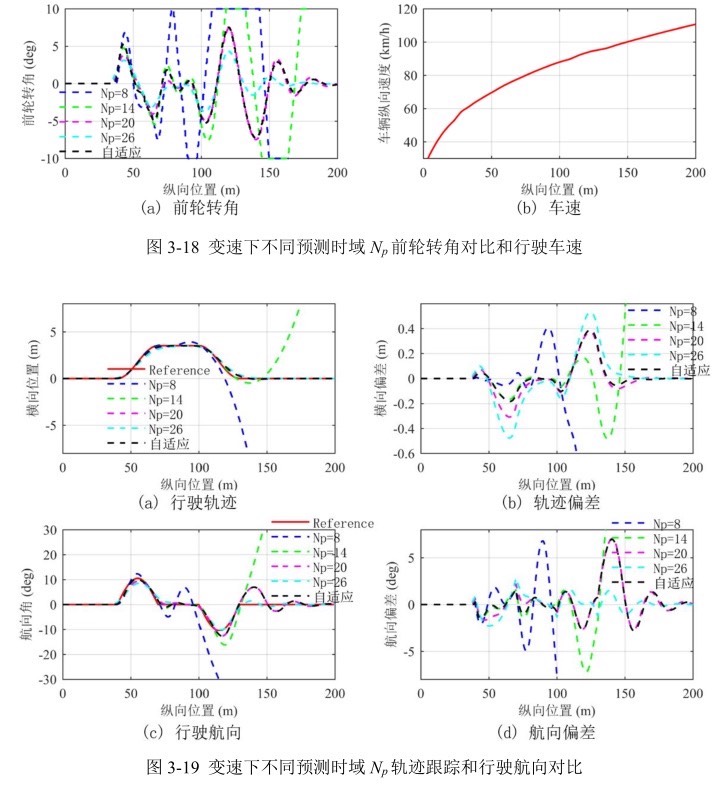
基于车速的变预测时域的MPC自适应轨迹跟踪控制,能够预测时域的, 类似驾驶员模型中的预瞄距离,在不同的车速下,预瞄控制器采用不同预瞄距离产生的控制效果不同,通过carsim与simulink联合仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。
有详细的lunwen分析说明和资料
ID:19180683710008880
想剁手书屋14
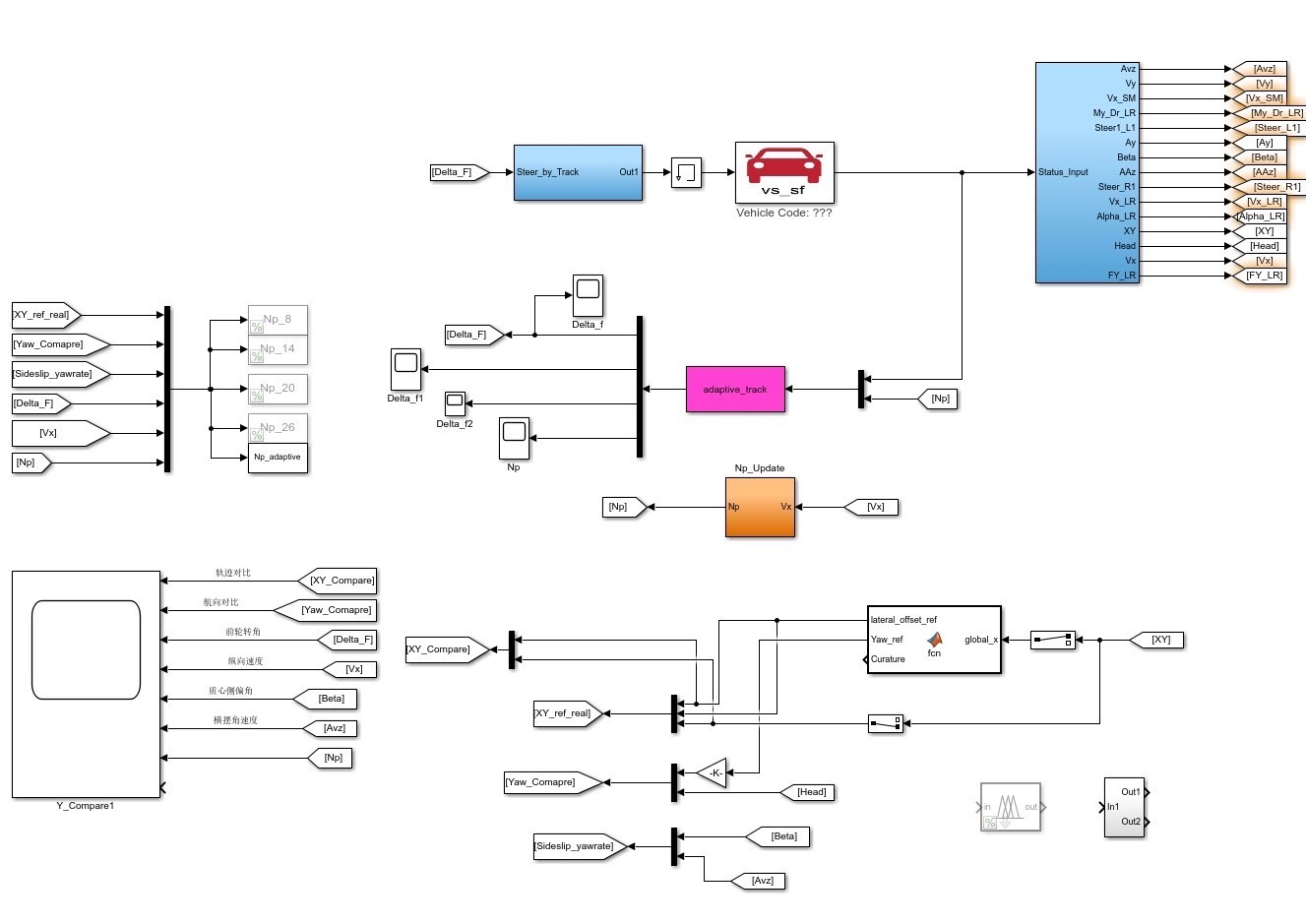
基于车速的变预测时域的MPC自适应轨迹跟踪控制是一种能够预测时域的控制方法,类似于驾驶员模型中的预瞄距离。不同车速下,预瞄控制器采用不同预瞄距离会产生不同的控制效果。本文通过carsim与simulink联合仿真,对改进后的轨迹跟踪控制器进行了详细分析。
首先,本文介绍了MPC(Model Predictive Control,模型预测控制)的基本原理和特点。MPC是一种基于模型的控制方法,它通过对系统进行建模,并在每个控制周期内对未来一段时间内系统的行为进行优化,从而实现更精确的控制。在轨迹跟踪控制中,MPC可以通过预测车辆的运动轨迹,提前进行控制,从而使车辆更准确地跟踪期望轨迹。
接下来,本文详细介绍了基于车速的变预测时域控制方法。该方法根据车辆的当前速度选择合适的预瞄距离,并据此进行控制。在低速行驶下,较短的预瞄距离可以更准确地控制车辆的轨迹,提高轨迹跟踪精度。而在高速行驶下,较长的预瞄距离可以提前预测车辆的行驶轨迹,避免因高速导致的轨迹失稳问题。通过对不同车速下的预瞄距离进行实验,本文验证了基于车速的变预测时域控制方法的有效性。
为了进一步验证该控制方法的有效性,本文使用carsim与simulink联合仿真平台进行了实验。通过对不同速度下的轨迹跟踪精度和稳定性进行评估,发现改进后的轨迹跟踪控制器在低速行驶下能够提供较高的轨迹跟踪精度,同时在高速行驶下也能保持车辆的稳定性,克服了传统控制方法中容易出现的失稳问题。
综上所述,本文通过基于车速的变预测时域的MPC自适应轨迹跟踪控制方法,提出了一种能够根据车速调整预瞄距离的控制策略。通过对carsim与simulink联合仿真的结果进行分析,本文验证了改进后的控制器在不同速度下具有较高的轨迹跟踪精度和稳定性。该控制方法对于实现更准确的车辆轨迹跟踪具有重要意义。
(以上为参考答案,仅供参考,具体写作仍需根据实际情况调整和扩展)
【相关代码 程序地址】: http://nodep.cn/683710008880.html















 3467
3467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









