









文章目录
前言
cartographer不能实时显示三维点云地图, 这是大家公认的cartographer 3d建图的弊端. ————李太白
本文实现的cartographer二维点云地图的构建是基于对李太白三维点云地图代码的修改。本人小白一枚,由于论文内容需要,急求cartographer的二维点云地图,但是大佬只做了三维点云地图的构建,无奈自己上手改,最终花不少时间才搞出来,希望能帮到同样处境的同学。——感谢李太白学长
原文链接:李太白三维点云地图
一、修改思路
还是TrajectoryNode
struct TrajectoryNode {
struct Data {
common::Time time;
// Transform to approximately gravity align the tracking frame as
// determined by local SLAM.
Eigen::Quaterniond gravity_alignment;
// Used for loop closure in 2D: voxel filtered returns in the
// 'gravity_alignment' frame.
sensor::PointCloud filtered_gravity_aligned_point_cloud;
// Used for loop closure in 3D.
sensor::PointCloud high_resolution_point_cloud;
sensor::PointCloud low_resolution_point_cloud;
Eigen::VectorXf rotational_scan_matcher_histogram;
// The node pose in the local SLAM frame.
transform::Rigid3d local_pose;
};
common::Time time() const { return constant_data->time; }
// This must be a shared_ptr. If the data is used for visualization while the
// node is being trimmed, it must survive until all use finishes.
std::shared_ptr<const Data> constant_data;
// The node pose in the global SLAM frame.
transform::Rigid3d global_pose;
};
既然要构建二维点云地图,就需要获取二维点云,原文中,点云是通过sensor::PointCloud high_resolution_point_cloud获取的,就像注释中写的:Used for loop closure in 3D.
二维点云是通过sensor::PointCloud filtered_gravity_aligned_point_cloud获取的,但是注意它的注释:Used for loop closure in 2D: voxel filtered returns in the ‘gravity_alignment’ frame,也就是说二维点云与三维点云不同,三维点云是建立在local坐标系下的,而二维点云是建立在gravity_alignment坐标系下的。
再往上看,发现有:Eigen::Quaterniond gravity_alignment,它的数据类型为:Eigen::Quaterniond,也就是四元数,再加上注释的说明可以确定,这是二维点云由local坐标系转到gravity_alignment坐标系转角的四元数表示。
换句话来说,如果试图将点云像原文中那样直接移动到global坐标系下,结果是糟糕的。所以需要先将点云由gravity_alignment坐标系转到local坐标系,再由local转到global,才能构建出理想的点云地图
二、计算步骤
1.gravity_alignment 坐标系到local坐标系
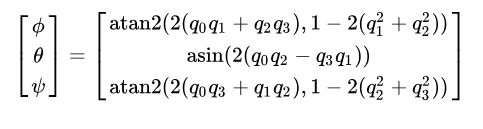
1) 四元数转欧拉角
四元数gravity_alignment中含有的数值为:x,y,z,w,分别对应下图中的
q
1
,
q
2
,
q
3
,
q
0
q_1,q_2,q_3,q_0
q1,q2,q3,q0
ψ
,
θ
,
ϕ
\psi,\theta,\phi
ψ,θ,ϕ 分表表示转角Yaw、Pitch、Roll,在二维问题中我们只需要关注转角Roll\
2)点云坐标逆转Roll(由gravity_alignment坐标系转local坐标系)
旋转矩阵: [ c o s ( − ϕ ) − s i n ( − ϕ ) s i n ( − ϕ ) c o s ( − ϕ ) ] \begin{bmatrix} cos(-\phi) & -sin(-\phi)\\ sin(-\phi) & cos(-\phi) \end{bmatrix} \quad [cos(−ϕ)sin(−ϕ)−sin(−ϕ)cos(−ϕ)]
2.local坐标系到global坐标系
与原文相同的操作
RangefinderPoint range_finder_point = global_pose.cast<float>() * point;
node_point_cloud->push_back(pcl::PointXYZ(
range_finder_point.position.x(),
range_finder_point.position.y(),
range_finder_point.position.z()));
}
————————————————
版权声明:本文为CSDN博主「李太白lx」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/tiancailx/article/details/120280113
三、具体替换代码步骤
1.map_builder_bridge.h
添加public的函数, 如下所示:
std::shared_ptr<MapById<NodeId, TrajectoryNode>> GetTrajectoryNodes();
在cartographer_ros命名空间下添加引用:
using ::cartographer::mapping::NodeId;
using ::cartographer::mapping::MapById;
using ::cartographer::mapping::TrajectoryNode;
头文件:
#include "absl/synchronization/mutex.h"
#include "cartographer/mapping/map_builder_interface.h"
#include "cartographer/mapping/pose_graph_interface.h"
#include "cartographer/mapping/proto/trajectory_builder_options.pb.h"
#include "cartographer/mapping/trajectory_builder_interface.h"
#include "cartographer/mapping/id.h"
#include "cartographer/mapping/trajectory_node.h"
#include "cartographer_ros/node_options.h"
#include "cartographer_ros/sensor_bridge.h"
#include "cartographer_ros/tf_bridge.h"
#include "cartographer_ros/trajectory_options.h"
#include "cartographer_ros_msgs/SubmapEntry.h"
#include "cartographer_ros_msgs/SubmapList.h"
#include "cartographer_ros_msgs/SubmapQuery.h"
#include "cartographer_ros_msgs/TrajectoryQuery.h"
#include "geometry_msgs/TransformStamped.h"
#include "nav_msgs/OccupancyGrid.h"
2.map_builder_bridge.cc
在 cartographer_ros/cartographer_ros/map_builder_bridge.cc 中的最下面, 添加如下函数
std::shared_ptr<MapById<NodeId, TrajectoryNode>> MapBuilderBridge::GetTrajectoryNodes() {
std::shared_ptr<MapById<NodeId, TrajectoryNode>> trajectory_nodes =
std::make_shared<MapById<NodeId, TrajectoryNode>>(
map_builder_->pose_graph()->GetTrajectoryNodes());
return trajectory_nodes;
}
具体函数有什么含义,就去看原文吧
3.node.h
在 node.h 中添加如下私有的成员变量
::ros::Publisher point_cloud_map_publisher_;
absl::Mutex point_cloud_map_mutex_;
bool load_state_ = false;
size_t last_trajectory_nodes_size_ = 0;
sensor_msgs::PointCloud2 ros_point_cloud_map_;
添加如下的共有的成员函数
void PublishPointCloudMap(const ::ros::WallTimerEvent& timer_event);
4.node.cc
添加头文件的引入以及变量名的引入
#include "cartographer/mapping/id.h"
#include "cartographer/mapping/trajectory_node.h"
#include "cartographer/sensor/point_cloud.h"
#include "pcl/point_cloud.h"
#include "pcl/point_types.h"
#include "pcl_conversions/pcl_conversions.h"
#include <pcl/io/pcd_io.h>
namespace cartographer_ros {
namespace carto = ::cartographer;
using carto::transform::Rigid3d;
using TrajectoryState =
::cartographer::mapping::PoseGraphInterface::TrajectoryState;
// lx add
using ::cartographer::mapping::NodeId;
using ::cartographer::mapping::MapById;
using ::cartographer::mapping::TrajectoryNode;
using ::cartographer::sensor::RangefinderPoint;
在构造函数中, 添加如下代码(use_trajectory_builder_3d换成use_trajectory_builder_2d)
if (node_options_.map_builder_options.use_trajectory_builder_2d()) {
point_cloud_map_publisher_ =
node_handle_.advertise<sensor_msgs::PointCloud2>(
"point_cloud_map", kLatestOnlyPublisherQueueSize, true);
}
在构造函数的最后, 为发布点云函数添加定时器, 设置为1秒种执行一次.(原文是10秒一次,但是我感觉一秒两次视觉上比较爽)
if (node_options_.map_builder_options.use_trajectory_builder_2d()) {
wall_timers_.push_back(node_handle_.createWallTimer(
::ros::WallDuration(0.5), // 10s
&Node::PublishPointCloudMap, this));
}
将之前声明的 PublishPointCloudMap 这个函数进行实现(主要改动区域)
void Node::PublishPointCloudMap(const ::ros::WallTimerEvent& timer_event) {
// 纯定位时不发布点云地图
if (load_state_ || point_cloud_map_publisher_.getNumSubscribers() == 0) {
return;
}
// 只发布轨迹id 0 的点云地图
constexpr int trajectory_id = 0;
// 获取优化后的节点位姿与节点的点云数据
std::shared_ptr<MapById<NodeId, TrajectoryNode>> trajectory_nodes =
map_builder_bridge_.GetTrajectoryNodes();
// 如果个数没变就不进行地图发布
size_t trajectory_nodes_size = trajectory_nodes->SizeOfTrajectoryOrZero(trajectory_id);
if (last_trajectory_nodes_size_ == trajectory_nodes_size)
return;
last_trajectory_nodes_size_ = trajectory_nodes_size;
absl::MutexLock lock(&point_cloud_map_mutex_);
pcl::PointCloud<pcl::PointXYZ>::Ptr point_cloud_map(new pcl::PointCloud<pcl::PointXYZ>());
pcl::PointCloud<pcl::PointXYZ>::Ptr node_point_cloud(new pcl::PointCloud<pcl::PointXYZ>());
// 遍历轨迹0的所有优化后的节点
auto node_it = trajectory_nodes->BeginOfTrajectory(trajectory_id);
auto end_it = trajectory_nodes->EndOfTrajectory(trajectory_id);
float cosphi;
float sinphi;
for (; node_it != end_it; ++node_it) {
auto& trajectory_node = trajectory_nodes->at(node_it->id);
auto& filtered_gravity_aligned_point_cloud = trajectory_node.constant_data->filtered_gravity_aligned_point_cloud;
auto& test = trajectory_node.constant_data->gravity_alignment;
auto& global_pose = trajectory_node.global_pose;
if (trajectory_node.constant_data != nullptr) {
node_point_cloud->clear();
node_point_cloud->resize(filtered_gravity_aligned_point_cloud.size());
// 遍历点云的每一个点, 进行坐标变换
for (const RangefinderPoint& point :
filtered_gravity_aligned_point_cloud.points()) {
//std::cout << test.coeffs().z() << std::endl;
double x = test.coeffs().x();
double y = test.coeffs().y();
double z = test.coeffs().z();
double w = test.coeffs().w();
cosphi = cos(atan2(2*(z*w + x*y),1 - 2*(y*y + z*z)));
sinphi = sin(atan2(2*(z*w + x*y),1 - 2*(y*y + z*z)));
//std::cout << cosphi << " " << sinphi << std::endl;
double point_x = point.position.x() * cosphi + point.position.y() * sinphi;// + global_pose.translation().x();//point_x = point.position.x() * cosphi + point_x - point.position.y() * sinphi;
double point_y = -point.position.x() * sinphi + point.position.y() * cosphi;//+ global_pose.translation().y();//point_x = point.position.x() * sinphi + point_x - point.position.y() * sinphi;
//std::cout << point_x << " " << point.position.x() << std::endl;
//point.position.x() = point_x;
//point.position.y() = point_y;
RangefinderPoint range_finder_point_pre;
range_finder_point_pre.position.x() = point_x;
range_finder_point_pre.position.y() = point_y;
range_finder_point_pre.position.z() = 0;
RangefinderPoint range_finder_point = global_pose.cast<float>() * range_finder_point_pre;//global_pose.cast<float>() *
//std::cout << global_pose.rotation().coeffs().x()<< global_pose.rotation().coeffs().y() << global_pose.rotation().coeffs().z() << global_pose.rotation().coeffs().w() << std::endl;
//std::cout << global_pose.translation().x() << std::endl;
//exit(-1);
node_point_cloud->push_back(pcl::PointXYZ(
range_finder_point.position.x(), range_finder_point.position.y(),
range_finder_point.position.z()));
}
// 将每个节点的点云组合在一起
*point_cloud_map += *node_point_cloud;
}
} // end for
ros_point_cloud_map_.data.clear();
pcl::toROSMsg(*point_cloud_map, ros_point_cloud_map_);
ros_point_cloud_map_.header.stamp = ros::Time::now();
ros_point_cloud_map_.header.frame_id = node_options_.map_frame;
LOG(INFO) << "publish point cloud map";
point_cloud_map_publisher_.publish(ros_point_cloud_map_);
}
将HandleWriteState函数改写一下(我直接默认save_pcd为true)
constexpr bool save_pcd = true;
if (node_options_.map_builder_options.use_trajectory_builder_3d() &&
save_pcd) {
absl::MutexLock lock(&point_cloud_map_mutex_);
const std::string suffix = ".pbstream";
std::string prefix =
request.filename.substr(0, request.filename.size() - suffix.size());
LOG(INFO) << "Saving map to pcd files ...";
pcl::PointCloud<pcl::PointXYZ>::Ptr pcl_point_cloud_map(new pcl::PointCloud<pcl::PointXYZ>());
pcl::fromROSMsg(ros_point_cloud_map_, *pcl_point_cloud_map);
pcl::io::savePCDFileASCII(prefix + ".pcd", *pcl_point_cloud_map);
LOG(INFO) << "Pcd written to " << prefix << ".pcd";
}
}
外面的CMakeLists.txt中添加:
find_package(PCL REQUIRED COMPONENTS common io)
4.结果展示
德意志博物馆数据集




写在最后
如有错误 欢迎指出
另外,李想学长的课讲的挺好的















 164
164











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









