






smart3d的Omega,phi,kappa与旋转矩阵R及映射
Omega,phi,kappa
Smart3d的角元素与摄影测量书上的角元素有两点不同
1. 摄影测量中Phi角是顺时针的
2. Smart3D的z轴是朝下的,而摄影测量书上的z轴是朝上的(影响到phi,omega的大小(+或-PI)以及kappa角的正负)
omega相当于绕x轴逆时针旋转omega角
phi相当于绕y轴逆时针旋转phi角
kappa相当于绕z轴逆时针旋转kappa角
注意:角元素的单位一定要注意,到底是角度还是弧度一定要注意
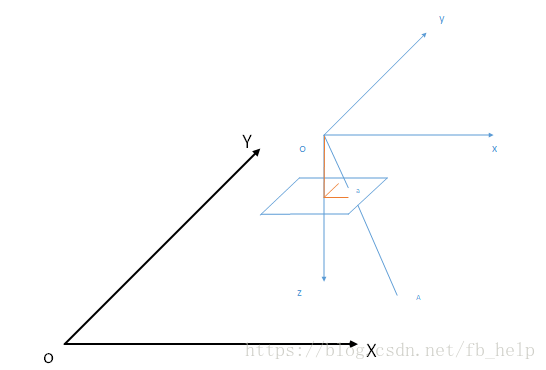
经验证,在CGCS2000坐标系下的smart3d的坐标系的初始指向如图:
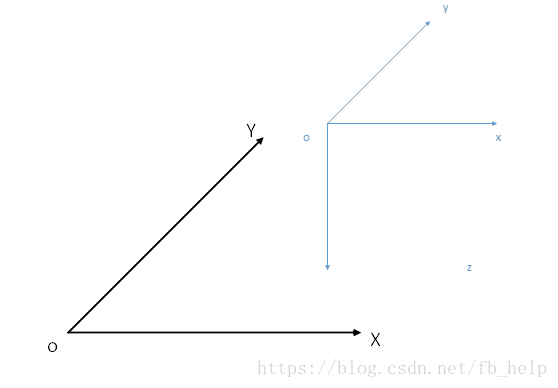
黑色坐标系为投影坐标系,即物方坐标系,蓝色为smart3d初始各轴的指向。
Ps:
逆时针:右手拇指与某个轴的指向相同,握拳的方向就是逆时针,绕某个轴逆时针转动可以想象成右手握住该轴,拇指指向与该轴相同并握拳。
旋转矩阵R
既然摄影测量书上的phi,omerga和kappa与smart3d上的角元素不同,那么就不能直接套用书上的公式了,下面就介绍怎么根据smart3d的导出的角元素计算旋转矩阵。
已经过验证:
这里以smart3D输出的phi,omerga和kappa为标准,旋转矩阵求法:
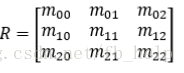
- R是行优先,即:
- R的计算:

- R的意义
这里的R是由物方算到像方的,如果是像方算到物方需要R取逆,即转置。R和T定义了坐标系之间的转换(尺度一至)即,任意两笛卡尔坐标系可以通过R和T进行变换,这里的R是物方到像方的R即物方坐标系到像方坐标系的映射旋转矩阵。如果再已知T,就可以计算物方点的坐标,在像方坐标系(像空间坐标系)下的坐标。
小插曲
不同角度影像在物方某平面的投影:
omega = 0,phi =0,kappa=0
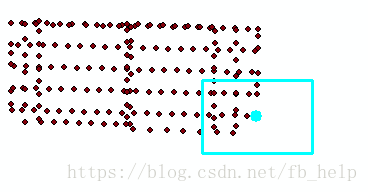
omega = 30°,phi =0,kappa=0
omega = 0,phi = 30°,kappa=0

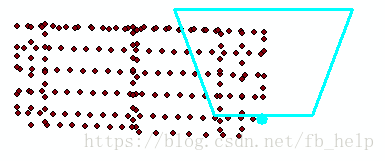
omega = 30°,phi =30°,kappa=0
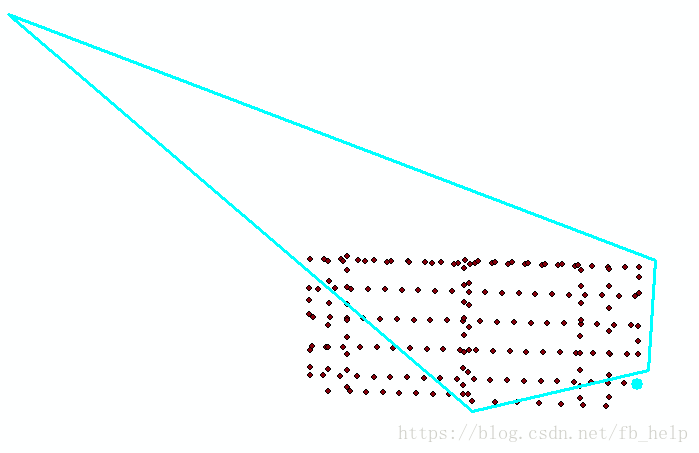
omega = 45°,phi =45°,kappa=0
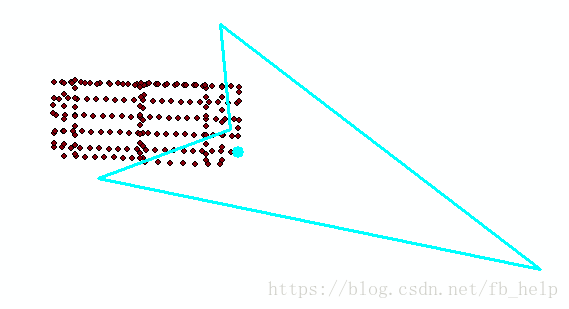
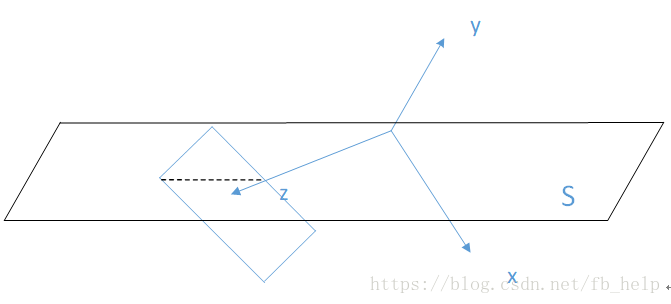
产生如此图形的原因是,像片的一角超出了摄影中心所在的xy平面,导致有一角发生了“反投“,因为投影到地面上一平面,当有的点超出摄影时所在的平面S时,就会反投。
对比omega = 30°,phi =30°,kappa=0,前三个角都在平面S下,所有正常,只有一个角在S平面上,发生了反投。
物方到像方的映射
物方到像方的映射怎么算
由于普通相机拍摄时,是以x轴向右,y轴向上,z轴向上的方式进行摄像的,小孔成像的原理就是将现实世界投向屏幕,成倒立等大的像,它的坐标系的定义:一般x轴指向相片的右侧,y轴指向相片的上测,由右手系推知z轴指向相片的上面(指向摄影中心),但我们存储二维影像时是以x轴向上,y轴向下,的方式存储的。成像和存储之间必然不同,存在转换关系。
Smart3D的计算公式


详细介绍见smart3d用户手册camera model
Smart3d在像片平面,始终遵循x向左,y向下的标准,都是以此方式为基准。这种方式也是像片像素在内存中的存储的排列方式。后面称此坐标系为标准坐标系。
变换公式:
x = x0 + f*(mat.a1*(X - Xs) + mat.a2*(Y - Ys) + mat.a3*(Z - Zs)) / (mat.c1*(X - Xs) + mat.c2*(Y - Ys) + mat.c3*(Z - Zs));
y = y0 + f*(mat.b1*(X - Xs) + mat.b2*(Y - Ys) + mat.b3*(Z - Zs)) / (mat.c1*(X - Xs) + mat.c2*(Y - Ys) + mat.c3*(Z - Zs));
mat即为上面计算的旋转矩阵R;X,Y,Z是物方坐标,Xs,Ys,Zs是相机中心坐标;注意,这里的x0,y0指的是以标准坐标系下的x0,y0;
这样计算出来的x,y也是在标准坐标系下的x,y,可以直接存入影像。
另外C是相机在世界坐标系下的坐标。
世界点坐标转相机坐标:XCamera = R(Xworld-C)
而在计算机视觉中
世界点坐标转相机坐标:XCamera = RXworld+t
因此C!=t。
t=-RC,t是相机原点在世界坐标系下的坐标。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









