







 本文详细介绍了电动汽车永磁同步电机的几种常见控制策略:开环控制、矢量控制、直接转矩控制和智能控制。开环控制简单但精度不足,适合基本调速;矢量控制能精确控制动态响应,适用于大范围调速;直接转矩控制响应快速,适用于电动车辆;智能控制则是未来发展趋势,有望提升系统整合性能。各种控制策略各有优势,适应不同的电动汽车工况需求。
本文详细介绍了电动汽车永磁同步电机的几种常见控制策略:开环控制、矢量控制、直接转矩控制和智能控制。开环控制简单但精度不足,适合基本调速;矢量控制能精确控制动态响应,适用于大范围调速;直接转矩控制响应快速,适用于电动车辆;智能控制则是未来发展趋势,有望提升系统整合性能。各种控制策略各有优势,适应不同的电动汽车工况需求。
论文《基于电动汽车永磁同步电动机的控制策略》 聂光辉
常见的对永磁同步电机的控制方式有恒压频比开环控制、失量控制、直线转矩控制和智能控制等控制方式。分别实现在不同行驶场合下对永磁同步电机的起动、加速、正转、反转及能量回收的控制。
近些年来,交流电机上常用的控制方式有开环控制、矢量控制、直接转矩控制及智能控制等,这些控制方式既能用于交流异步电机,同时也能用于在我国具有得天独后发展前景的永磁同步电机上。
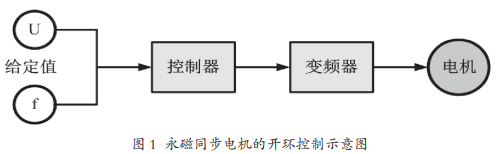
1 永磁同步电机的开环控制
永磁同步电机的开环控制(VVVF)是交流电动机变频调速最基本的控制方式,简称变频调速系统,也称恒压频比开环控制。
永磁同步电机的开环控制原理是控制器对给定或者预先设定好的电压及频率进行分析和计算,然后控制输入变频器的三相正弦交流电压值及频率,使之随给定或者预先设定好的电压及频率的变化而变化,从而改变定子绕组的磁场旋转速率,转子的旋转速度也随之改变,也就改变了电机的转速,如图 1 所示。
开环控制在基频(指电机在额定扭矩时的频率)以下的调速过程中的转差率不随转速的变化而变化,电动机的机械特性比较硬,调速范围宽,无论高速还是低速时工作效率都比较高。
但由于该种控制方式没有位置传感器检测转子速度和位置的信号,属于开环控制,因此难以准确控制电磁转矩,在电动汽车行驶中开空调或者上坡时,突加的负荷可能会导致转子转速降低,甚至是停转。所以不适合对电动汽车上的永磁同步电机进行控制。
2 矢量控制
矢量控制(VC)最初应用于异步电机,后来
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1461
1461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









