






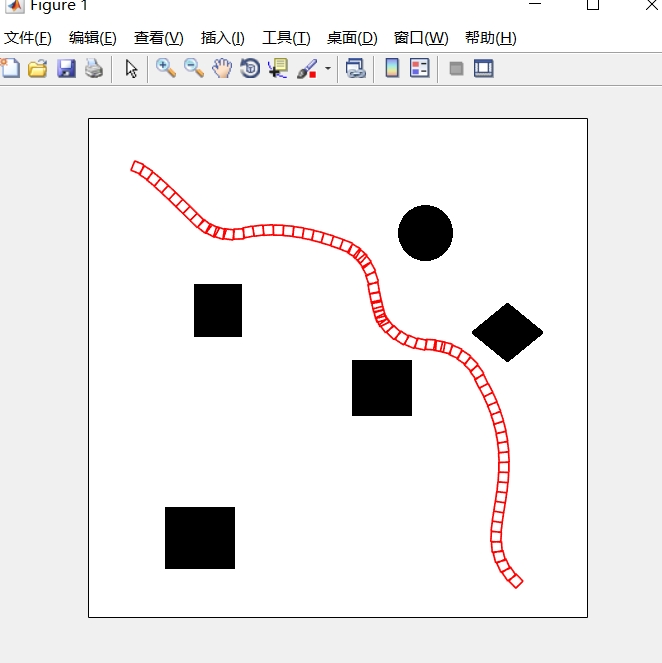
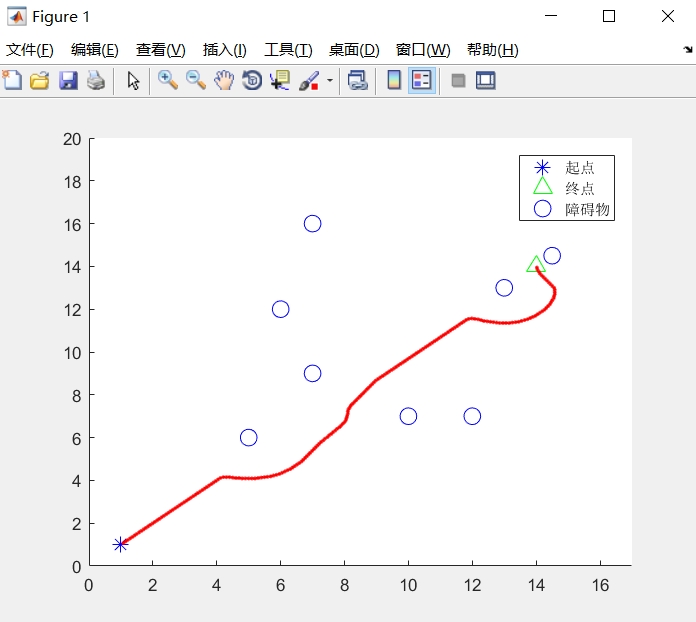
人工势场法路径规划matlab代码,下图为人工势场法,人工势场法改进。
内容包括两种方法编写人工势场法,注释挺详细的,还有文档对公式方法进行解释。
还有A*,rrt等代码。
ID:889664961119807
yjjyzzZ
人工势场法是一种常用于路径规划的算法。它通过模拟物体间相互作用的力场,将路径规划问题转化为搜索最优力场路径的问题。在本文中,我们将详细介绍人工势场法路径规划的原理和实现方法,并提供了MATLAB代码的编写示例。
首先,让我们来介绍人工势场法的基本原理。人工势场法中的物体可以分为两类:障碍物和目标点。障碍物具有排斥力,目标点则具有吸引力。通过在环境中引入障碍物和目标点产生的力场,我们可以将机器人的路径规划问题转化为在力场中搜索最优路径的问题。
在编写人工势场法的代码时,我们需要注意以下几点。首先,我们需要对环境中的障碍物进行建模,并为其赋予适当的排斥力。障碍物的排斥力会随着机器人与其距离的减小而增加,使机器人避开障碍物。
其次,我们需要为目标点设置吸引力。目标点的吸引力会随着机器人与其距离的减小而增强,吸引机器人朝向目标点。
在编写代码时,我们可以利用向量的计算来模拟力场的作用。对于障碍物产生的排斥力,我们可以使用一种函数来描述它的衰减规律。通过计算机器人与障碍物的距离,并利用该函数计算排斥力的大小,并与机器人的速度方向相反。而目标点的吸引力可以通过计算机器人与目标点的距离,并将其作为机器人的速度方向。
在文档中,我们详细介绍了人工势场法的数学原理和算法流程,并通过注释对代码进行了详细解释。我们还提供了A*算法和RRT算法的代码示例,这些算法也常用于路径规划问题。
使用人工势场法进行路径规划有其优点和局限性。优点在于其简单易懂的原理和实现方式,以及对环境变化的适应性较强。然而,人工势场法也存在一些局限性,例如容易陷入局部最优解、难以处理复杂环境等。
综上所述,人工势场法是一种常用的路径规划算法。本文通过介绍人工势场法的原理和实现方法,并提供了MATLAB代码示例,希望能够帮助读者更好地理解和应用该算法。最后,我们鼓励读者在实践中不断优化和改进人工势场法,并结合其他路径规划算法,以获得更高效和准确的路径规划结果。
相关的代码,程序地址如下:http://nodep.cn/664961119807.html
















 905
905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









