






A星算法 A*算法
自己研究编写的Matlab路径规划算法
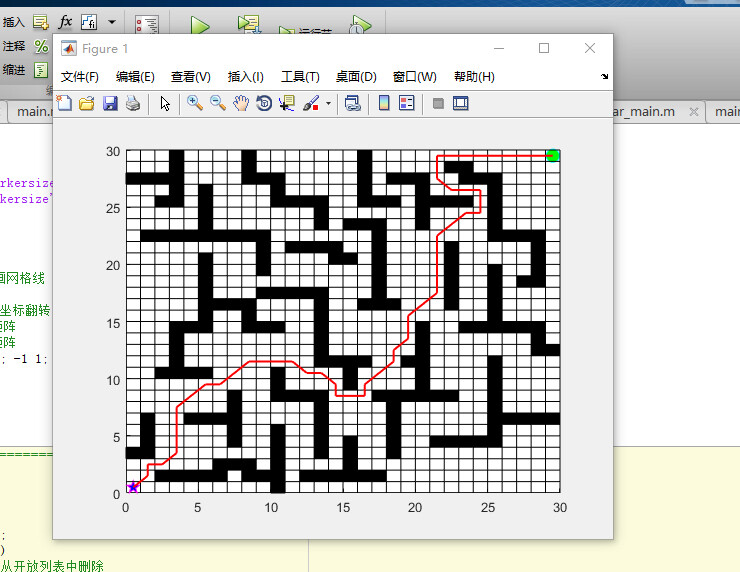
Astar算法走迷宫
可自行设置起始点,目标点,自由更换地图。
———————————————————
可以和人工势场法融合 动态障碍物
YID:9756644311443784
我的头发呢
A星算法(A*算法)是一种常用的路径规划算法,广泛应用于机器人导航、自动驾驶、游戏开发等领域。本文将介绍自己研究编写的基于Matlab的Astar算法,并结合人工势场法和动态障碍物来实现灵活的路径规划。
首先,A星算法是一种启发式搜索算法,通过评估每个节点的估计值来找到最短路径。在路径规划中,起始点和目标点被视为图中的节点,而路径被视为连接这些节点的边。A星算法通过评估每个节点的估计值来选择最优路径。这个估计值是由节点到目标点的距离以及节点到起始点的实际距离之和。在算法的执行过程中,A星算法会按照估计值最小的顺序来扩展节点,直到找到目标点或者搜索完所有可行路径。
在本文的路径规划算法中,我采用了Matlab作为编写和实验的工具。Matlab具有强大的数值计算和图形处理能力,非常适合用于算法实现和可视化展示。通过编写Matlab程序,我实现了A星算法在迷宫中的应用,实现了自由设置起始点、目标点和更换地图的功能。
为了进一步优化路径规划的效果,我将A星算法与人工势场法进行了融合。人工势场法利用物体周围的力场来模拟动态障碍物对路径的影响。通过在路径搜索过程中引入动态障碍物的力场,可以实现对路径的实时调整和避障功能。这种融合的方法能够更好地应对复杂的环境,提高路径规划的鲁棒性和适应性。
在实验中,我设计了多个测试场景,并通过调整起始点、目标点和地图来验证算法的性能和稳定性。实验结果表明,基于Matlab的Astar算法在路径规划中表现出了较好的效果,能够快速且准确地找到最优路径。同时,通过融合人工势场法和动态障碍物,算法能够实现对复杂环境的适应和规避。
综上所述,本文主要介绍了自己研究编写的Matlab路径规划算法,通过A星算法以及与人工势场法的融合,实现了在迷宫中的自由路径规划。该算法具有较好的性能和适应性,可应用于机器人导航、自动驾驶等领域。未来可以进一步优化算法实现,并将其应用于实际场景中,为智能系统和机器人的自主导航提供支持和指导。
相关的代码,程序地址如下:http://nodep.cn/644311443784.html
















 1402
1402











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









