






一、简介
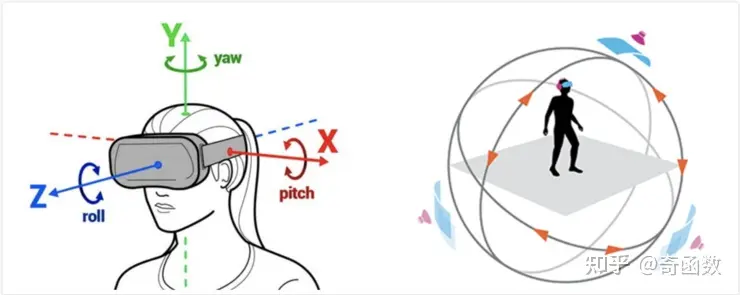
6DoF(Six degrees of freedom tracking,六自由度追踪)是指用户可以在物理空间内任何位置、任何方向自由地观看节目素材。 用户移动可以被传感器或输入控制器捕获到,同时支持用户空间位移和头部姿态变化。典型的应用场景是用户自由走动并同时通过 HMD 观看 VR 视频内容。
3DoF与6DoF技术对比图一
3DoF与6DoF技术对比图二
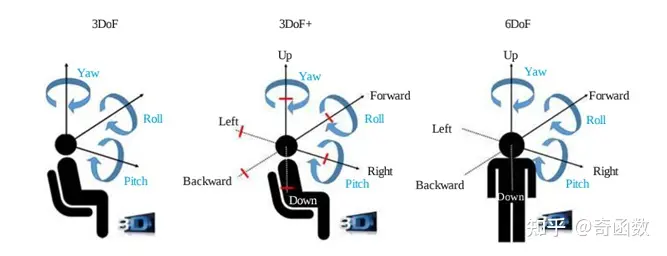
1、3DoF的VR眼镜(设备),是指该VR设备可以检测到头部向不同方向的转动,但是不能检测到头部的前后左右的空间位移。
2、6DoF的VR眼睛(设备),指除了检测头部的转动带来的视野角度变化外,还能够检测到由于身体移动带来的上下前后左右位移的变化。
3、6DoF= 绕x轴旋转(pitch,俯仰)、绕y轴旋转(yaw,偏航) 、绕x轴旋转(roll,滚转)、沿x轴左右移动(运动)、沿y轴前后移动(波动)、沿z轴上下移动(升降)。
4、6DoF使用的惯性测量单元由3 轴加速度计+3 轴陀螺仪组成。
解释一下自由度,自由度与刚体在空间中的运动相关。可以理解为物体移动的不同基本方式。
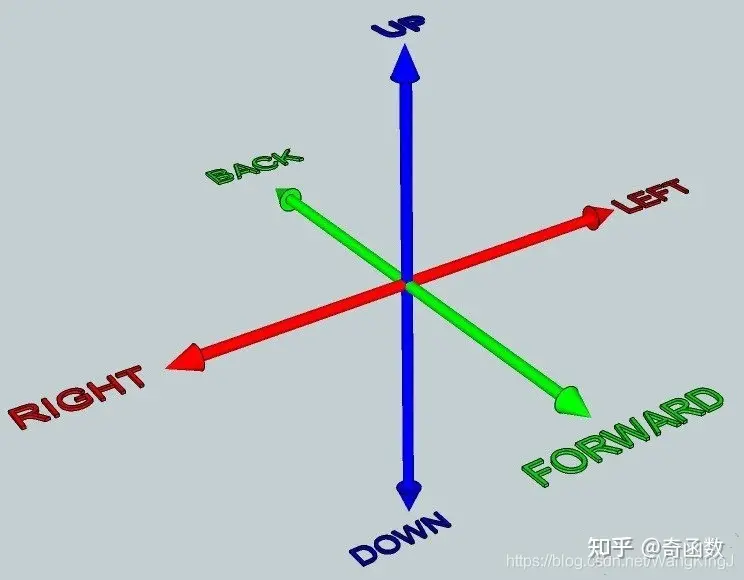
自由度方向
自由度一共有6个,可以分为两种类型:平移和旋转。
1. 平移运动
刚体可以在3个自由度中平移:向前/后,向上/下,向左/右

平移运动
2. 旋转运动
刚体在3个自由度中旋转:纵摇(Pitch)、横摇(Roll)、垂摇(Yaw)

旋转运动
因此,3种类型的平移自由度+3种类型的旋转自由度 = 6自由度
在任意一个自由度中,物体可以沿两个“方向”自由运动。例如,电梯限制在1个自由度中(垂直平移),但电梯能够在这个自由度中上下运动。同样,摩天轮限制在1个自由度中,但这是旋转自由度,所以摩天轮能够朝相反的方向旋转。
我们可以继续举例子,比如说主题公园。碰碰车总共有3个自由度:它只能在3轴中的2条里平移(无法像电梯那样上下移动);然后它只能以一种方式旋转(无法像飞机那样纵摇和垂摇)。 所以2个平移+1个旋转=3自由度。
无论有多复杂,刚体的任何可能性运动都可以通过6自由度的组合进行表达。 例如在你用球拍击打网球的时候,球拍的复杂运动可以表示为平移和旋转的组合。
原文致敬:6-DoF相关基础知识整理_WangKingJ的博客-CSDN博客
二、AR眼镜上实现6DoF追踪
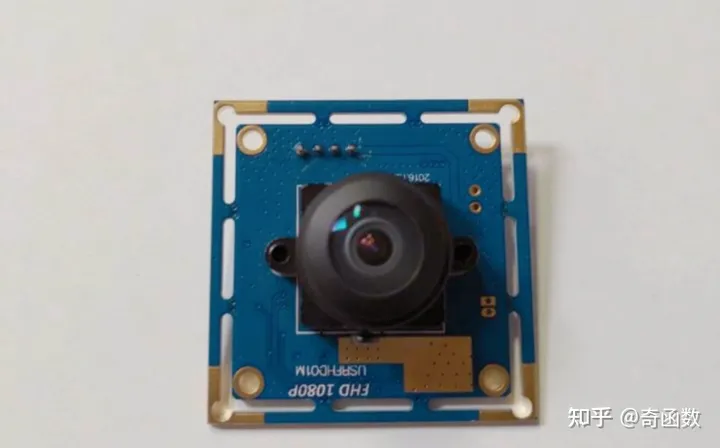
1、单摄像头
● 硬件成本低
● 易于集成到多种眼镜设计中
● 需要更专业的优化和定制
● 适用于偏静态场景

单摄像头
视频摄像头是AR眼镜的常用组件,主要用于拍摄高分辨率的照片和视频。在外观和可用性方面,将单个相机安装在眼镜上相对简单。
但是,视频摄像机通常以低频率(<60fps,大多数<30fps)运行,无法在运动中捕捉的高质量图像。 “果冻效应”和其他扭曲使得位置追踪失败。
2、单眼鱼眼摄像头
● 为6DoF追踪所预留的传感器
● 持续高频刷新6DoF追踪结果
● 会出现尺度漂移,使得虚拟物体会在场景中意外移动
单鱼眼摄像头
一些AR眼镜会配备用于6DOF追踪的单个鱼眼镜头。此解决方案会产生一些额外的功耗,但通常会为设备提供更好的6DOF追踪效果。鱼眼摄像头的高相机帧更新率(> 90fps)和全局快门功能,可以使得SLAM系统在运动场景中保持可靠的追踪位置。但单个鱼眼摄像机应放置在眼镜前面,这会产生一些设计限制。
单鱼眼摄像头比较不足的的地方在于它所支持的场景规模有限。一旦移动范围过大,SLAM系统就容易产生尺度漂移,导致虚拟对象在场景中意外移动。
3、双目鱼眼摄像头
● 高功耗
● 追踪、尺度估算准确
● 眼镜的工业设计会面临挑战
基于双目鱼眼的6DoF追踪系统已被不同的AR / VR头戴式设备制造商证明是一种可以量产的解决方案,高通已经使用双目鱼眼视觉在其VR头盔上展示了高质量的6DoF位置追踪功能。
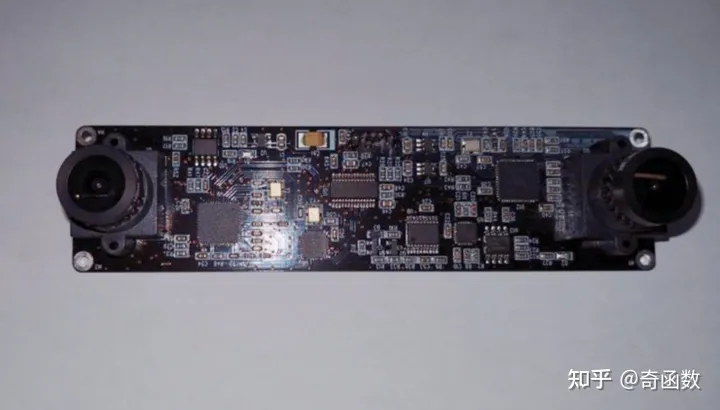
双目鱼眼摄像头模组
由于它提供实时的地图初始化、强大的追踪和对环境尺度的准确测量,因此额外增加摄像机所产生的功耗和成本是值得的。与单眼解决方案相比,双目鱼眼摄像头可以更快地扩展场景,并能更准确的测量环境尺度从而防止漂移。即使传感器数量加倍,计算复杂度也不比单眼视觉系统高很多。但该方案的实现需要高质量优化和定制工作,并且功耗高、发热大,需要更强的系统和硬件支持。
4、运用边缘计算
● 成本高昂
● 能实现高质量的6DoF追踪
● 稳定性高,可兼容不同平台

英特尔推的定位追踪实感摄像头T265 可在边缘执行计算任务
边缘计算在AR设备中变得越来越流行,例如,Hololens已经通过边缘计算来运行其SLAM功能,使CPU和OS在用户应用程序上更高效地工作。对于轻量级AR眼镜,通过边缘计算来运行SLAM不仅可以减少计算负荷,还可以使AR眼镜兼容不同类型的主机平台。
这个解决方案的最优之处就在于,它可以在任何主机平台上均衡性能,无需定制优化算法。然而,轻量级AR眼镜通过边缘计算运行6DoF并不容易。这些类型的AR眼镜上的芯片通常仅设计用于驱动显示器并传输传感器数据而无剩余资源用于其他计算工作。因此可行的解决方案是将成熟的6DoF追踪模块集成到AR眼镜板上。
目前还没有关于哪种解决方案对于轻型眼镜“完美”的结论。设计人员需要根据AR眼镜的应用场景,来定义其产品的功能和预期用途,以便做出最佳的软硬件选择。
随着轻量级AR眼镜的逐渐普及,具有6DoF追踪功能的产品是能够给消费者带去优质体验的基础,也是AR产品走向千家万户的关键技术之一。
作者:霍志宇,美国密苏里大学计算机和电子工程系博士毕业,研究机器人及人机交互方向。现就职于位于美国旧金山的Rokid R-Lab,担任研究科学家。
方案致敬:看不懂6DoF,还想谈AR?深入浅出讲解6DoF四种流行方案 | 雷峰网
三、其他知识
1、姿态与旋转矩阵:
Tam Alex:(番外)姿态与旋转矩阵(I)112 赞同 · 16 评论文章编辑
2、3D-2D:PnP算法原理:
3D-2D:PnP算法原理_Andy是个男子名的博客-CSDN博客blog.csdn.net/u014709760/article/details/88029841编辑
3、六自由度系统(6DOF)自由度计算公式及算法解析:
六自由度系统(6DOF)自由度计算公式及算法解析-天誉科技六自由度平台www.6dof.cc/jishufuwu/135.html编辑

















 1051
1051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









