







前言
提示:这里可以添加本文要记录的大概内容:
目前已经学习了GPIO的输入输出,但是没有完整的显示信息,最便宜的显示就是串口。
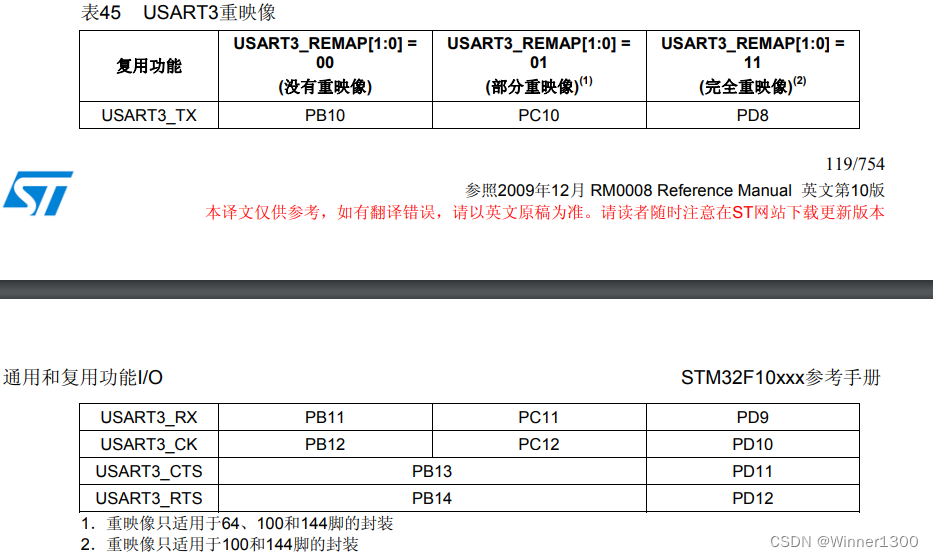
000 -111
AVR单片机 已经学会过了,
提示:以下是本篇文章正文内容,下面案例可供参考
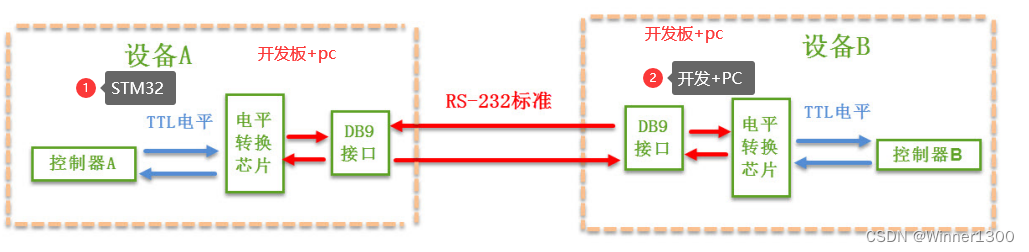
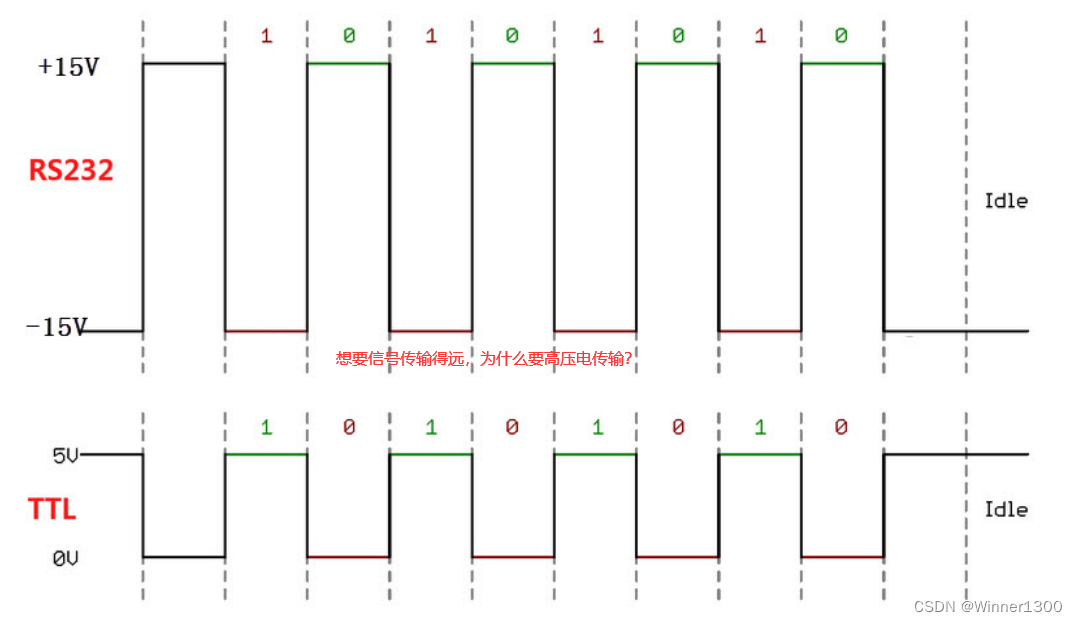
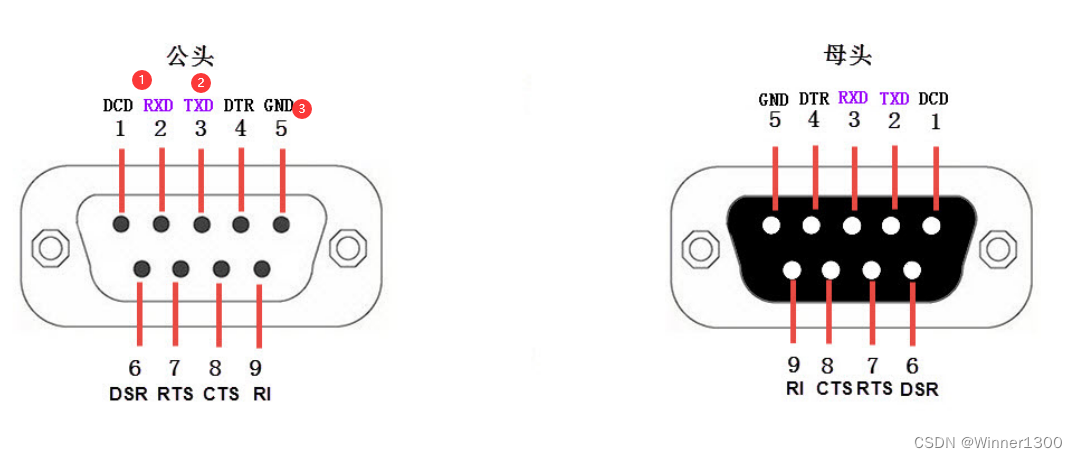
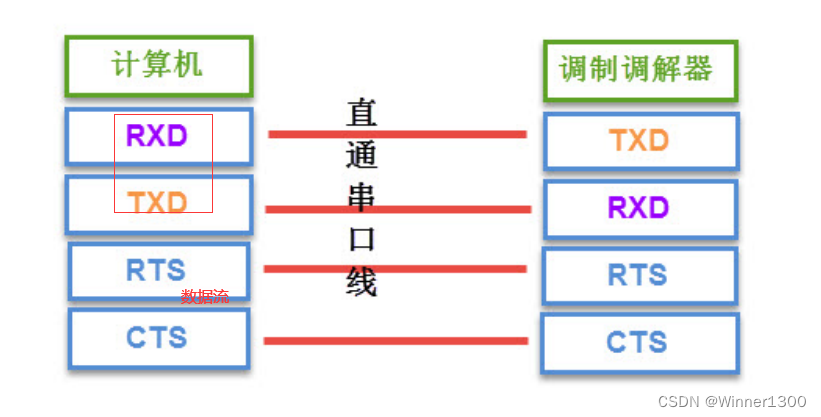
一、串口是什么?
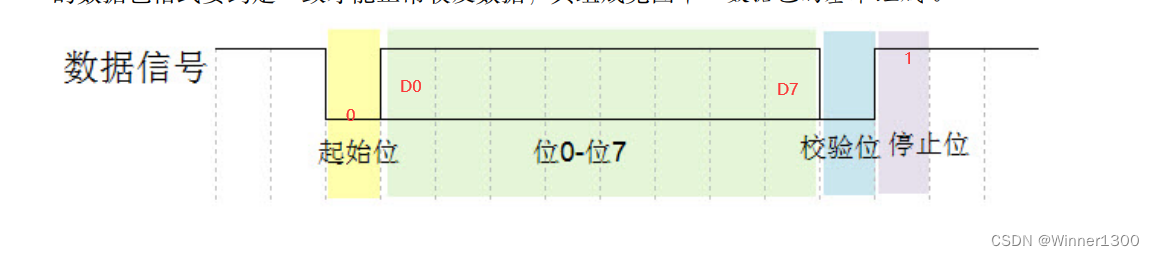
1.串口的基本认识
https://www.bilibili.com/video/BV1y34y147s5/?spm_id_from=333.337.search-card.all.click
https://www.bilibili.com/video/BV1PD4y147ts/?spm_id_from=autoNext
https://www.bilibili.com/video/BV14k4y187e6/?spm_id_from=autoNext

目标
2.STM32的串口结构
- 对外的就是TX RX
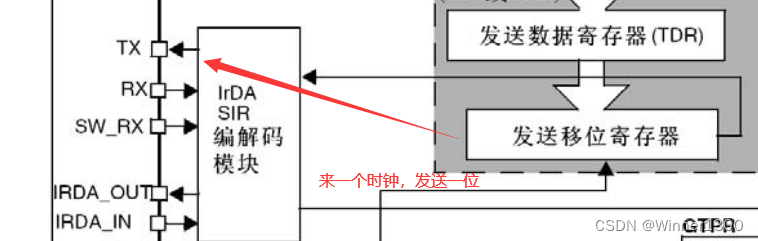
- 读写原理
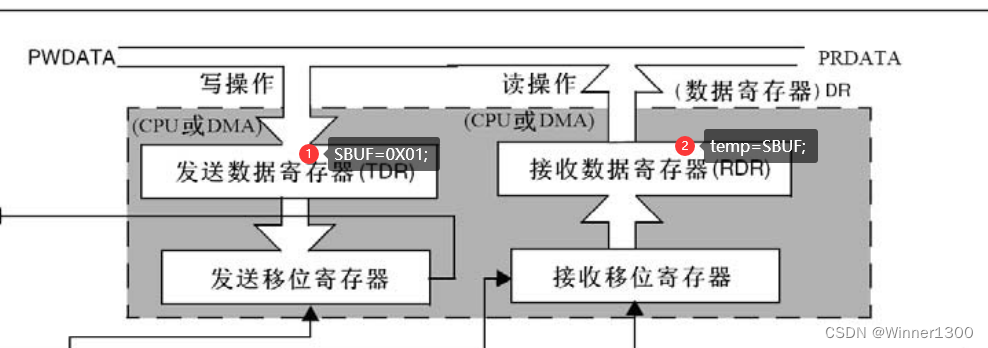
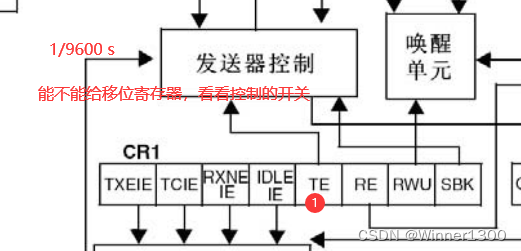
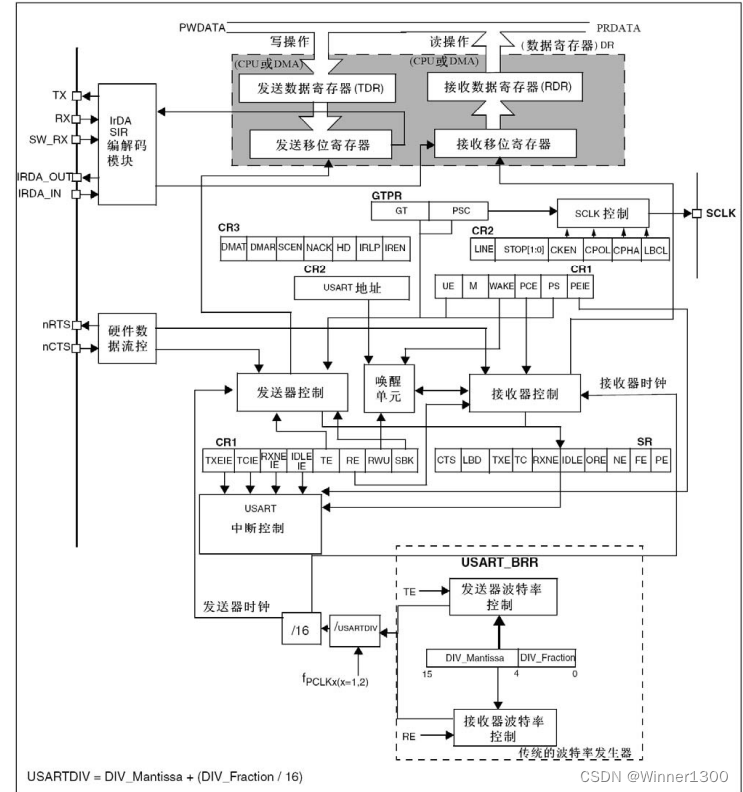
USART_DR类似51单片机的SBUF
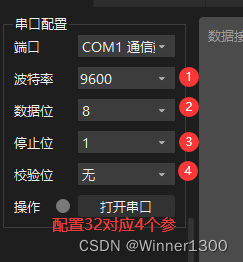
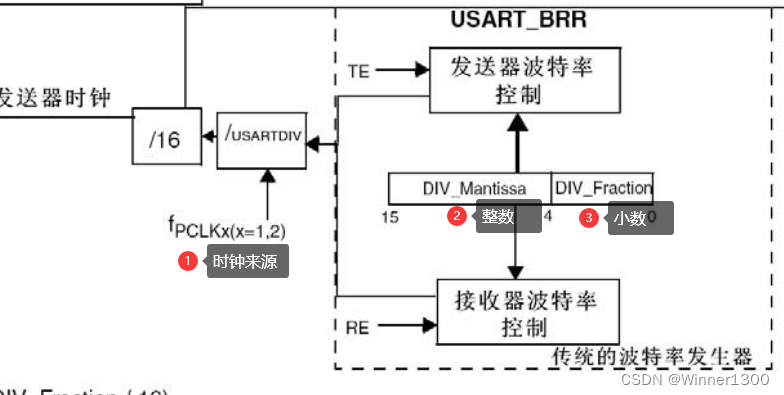
3.实现串口通信最简单的就是配置好和串口助手参数
二、使用步骤
1.开启时钟
- GPIO的时钟
- UART
代码如下(示例):
//开启串口1和GPIOA.9 10的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_USART1, ENABLE);
2. 配置引脚
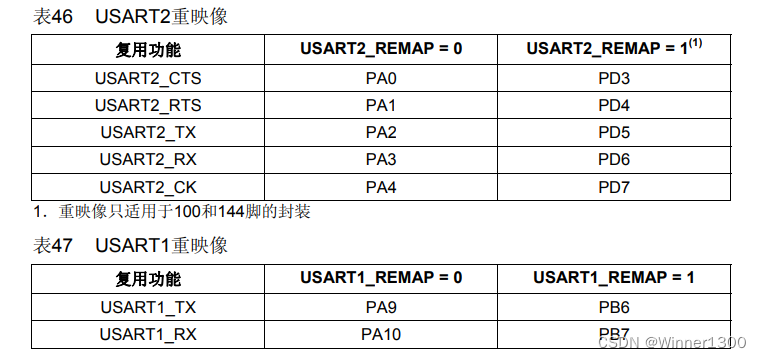
- 串口1 PA9 PA10
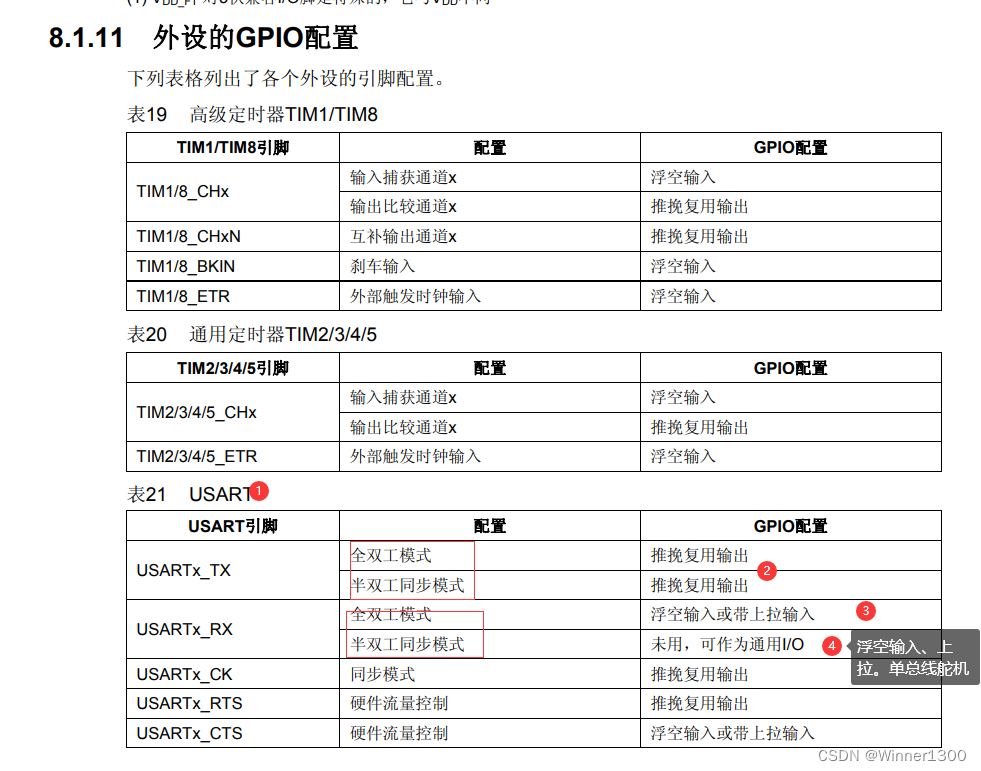
//2.配置GPIO
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_9; //TX
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct); //&x
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_10; //RX
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct); //&x
3.初始化串口
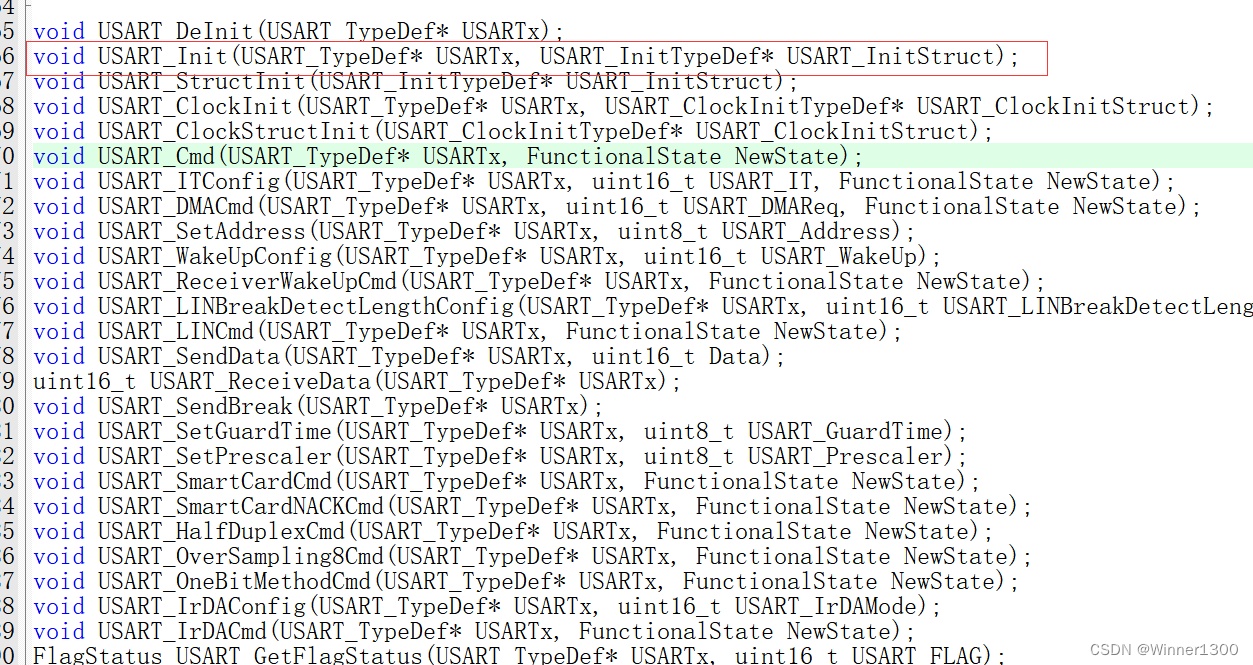
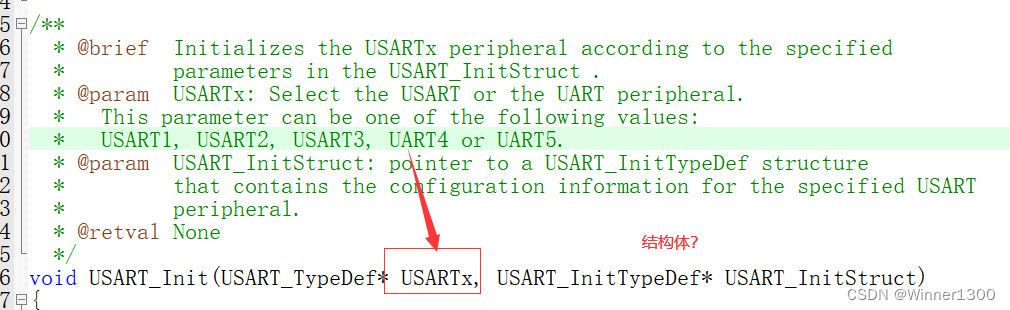
代码如下(示例):
// 3.配置USART
USART_InitStruct.USART_BaudRate= 9600;
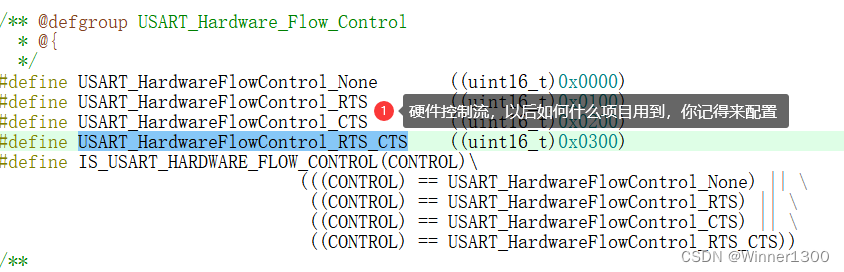
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_InitStruct.USART_Parity= USART_Parity_No;
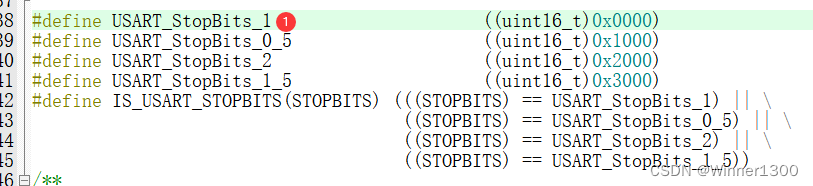
USART_InitStruct.USART_StopBits= USART_StopBits_1;
USART_InitStruct.USART_WordLength= USART_WordLength_8b;
USART_Init( USART1, &USART_InitStruct);
4. 串口使能
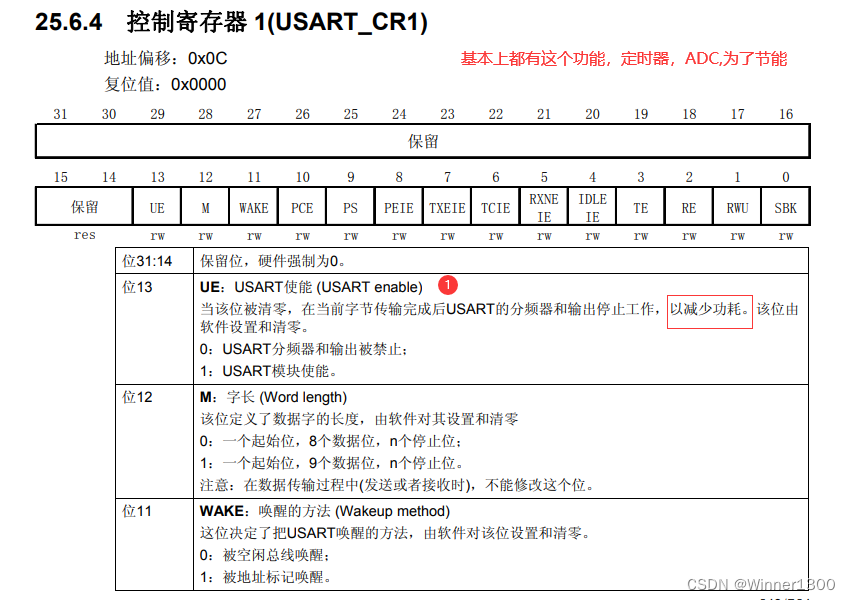
USART_Cmd(USART1, ENABLE);
5. 串口如何发送?

5.1发送单个字符
USART_SendData(USART1, 'A');
5.2 发送多个字符
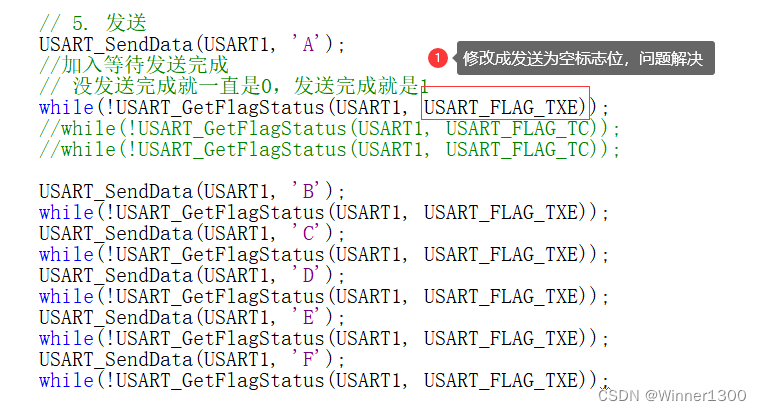
// 5. 发送
USART_SendData(USART1, 'A');
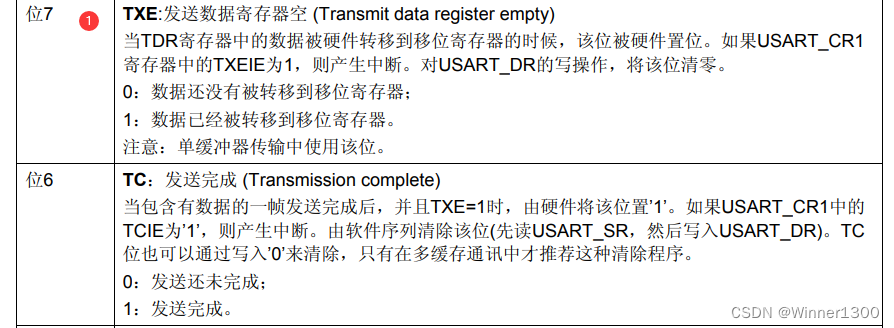
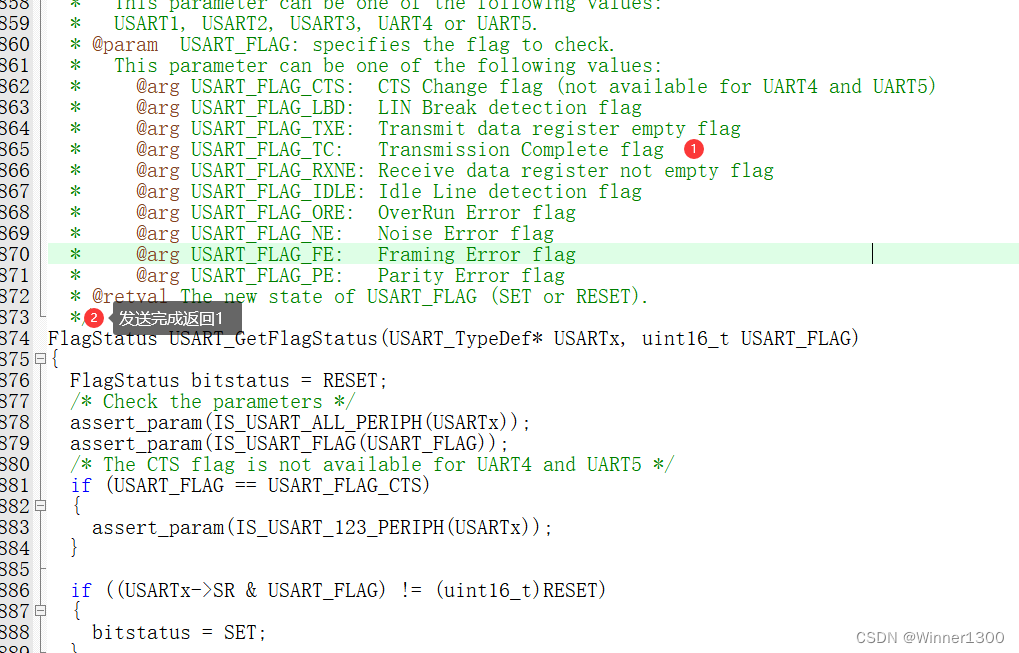
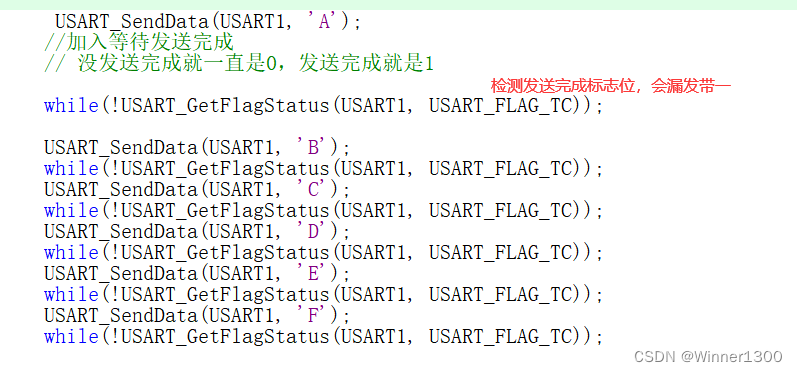
//加入等待发送完成
// 没发送完成就一直是0,发送完成就是1
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
//while(!USART_GetFlagStatus(USART1, USART_FLAG_TC));
//while(!USART_GetFlagStatus(USART1, USART_FLAG_TC));
USART_SendData(USART1, 'B');
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
USART_SendData(USART1, 'C');
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
USART_SendData(USART1, 'D');
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
USART_SendData(USART1, 'E');
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
USART_SendData(USART1, 'F');
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
5.3 写成一个发送字符串的函数
字符串最后一位就是 0,NULL
U8 ta[]="123";
send_string(ta); //这时候ta代表装着 123数据的首地址,1的地址,*p就是1,p就是1的地址也首地址,ta;
void send_string(u8 *p)
{
while(*p !=0)
{
USART_SendData(USART1, *p);
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
p++;
}
}
5.4 发送多类型,采用printf()不要在中断中使用该函数
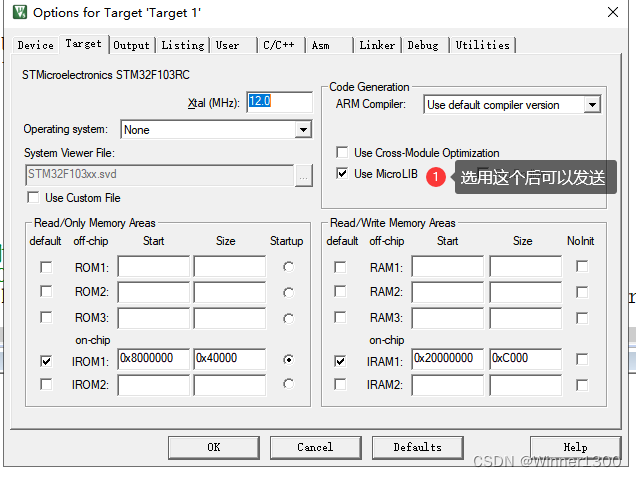
需要重定向一个函数,让printf 发送到串口而不是C语言里面的控制台
加头文件
#include “stdio.h”
int fputc(int ch,FILE *f)
{
USART_SendData(USART1, (u8)ch);
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
return ch;
}
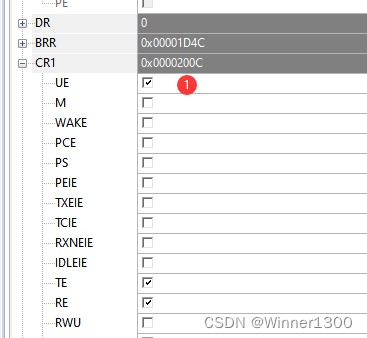
单独写这个不能发送
要勾选
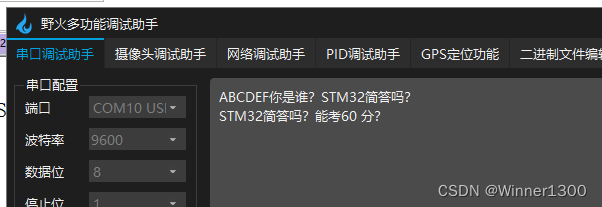
printf("STM32简答吗?");
printf("STM32简答吗?\r\n");
printf("STM32简答吗?能考%d 分?\r\n",60);
6. 串口如何接收?
串口中断数据接收有2种方法,为了节省资源,一般采用中断的方法
- 查询
- 中断
6.1 查询的方法,在主函数不断获取标志位,
void main()
{
while(1)
{
if(串口接收完成)
{
temp= 接收函数
}
}
}
6.2 中断获取数据的方法
- 步骤
- 中断分组
- 配置NVIC优先级管理
- 开启串口接收中断
- 写中断服务函数
第一、二步
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd= ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority= 1;
NVIC_Init(&NVIC_InitStruct);
第三步
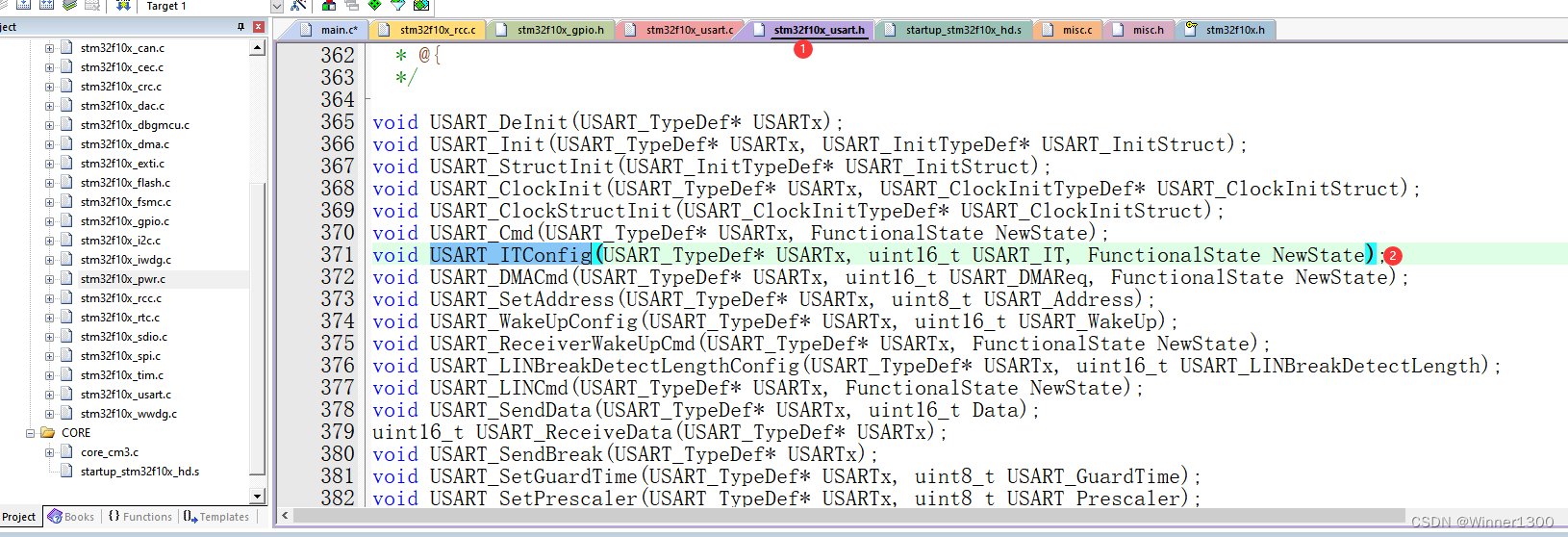
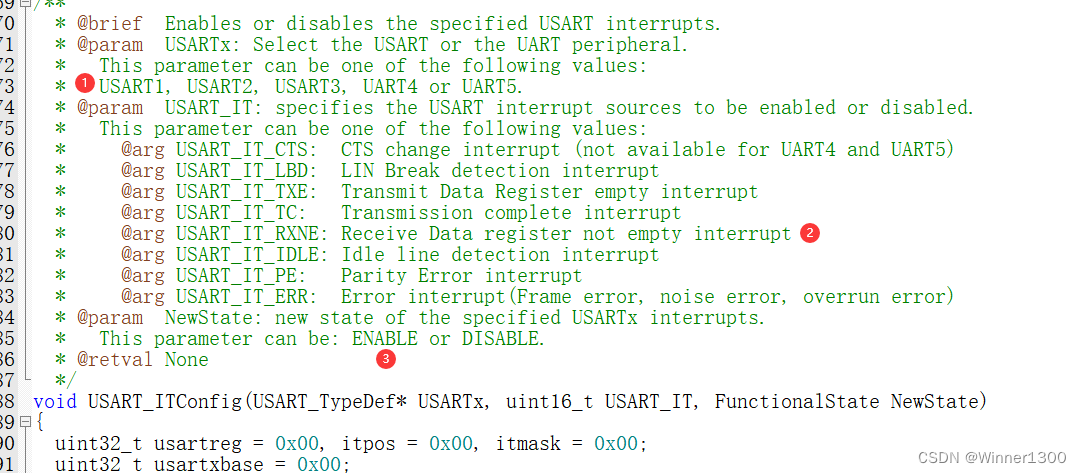
USART_ITConfig( USART1, USART_IT_RXNE, ENABLE);
第四步
void USART1_IRQHandler() //中断函数
{
u16 temp;
if(USART_GetITStatus( USART1, USART_IT_RXNE)) //判断是否是接收完成中断
{
temp=USART_ReceiveData(USART1); //接收数据
USART_SendData(USART1, temp); //发送收据
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清楚接收完成中断
}
}
7.是否要中断?要中断有什么好处
三、测试
1. 硬件条件
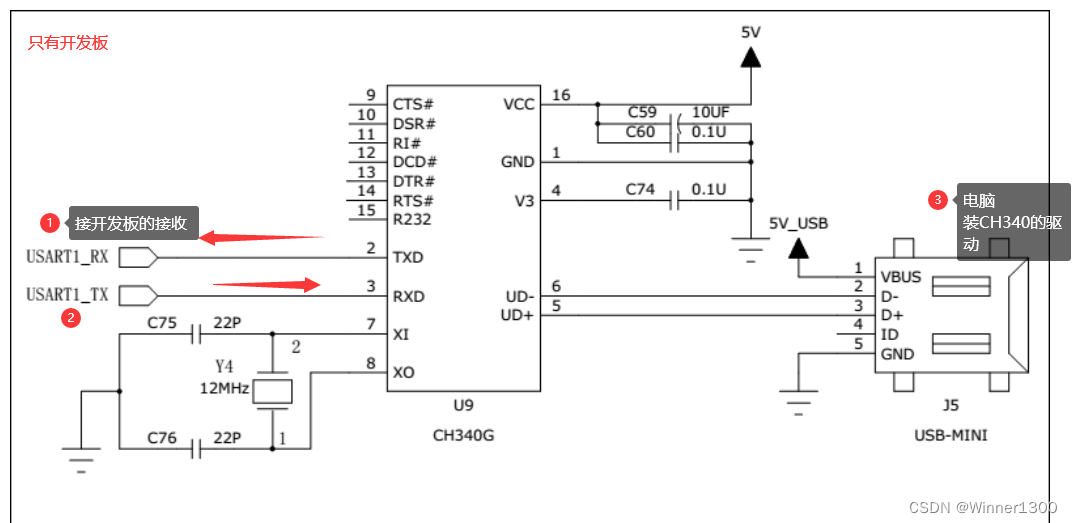
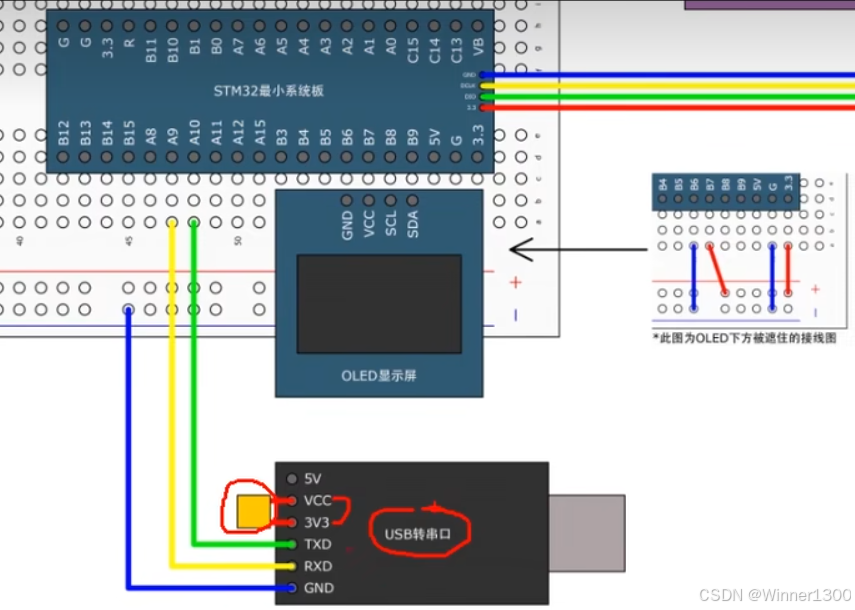
使用小板子,比如江科大的教程,板子上没有带CH340通信模块的要使用外部的USB转串口模块与板子进行连接
PA9- >RX
PA10->TX
GND->GND
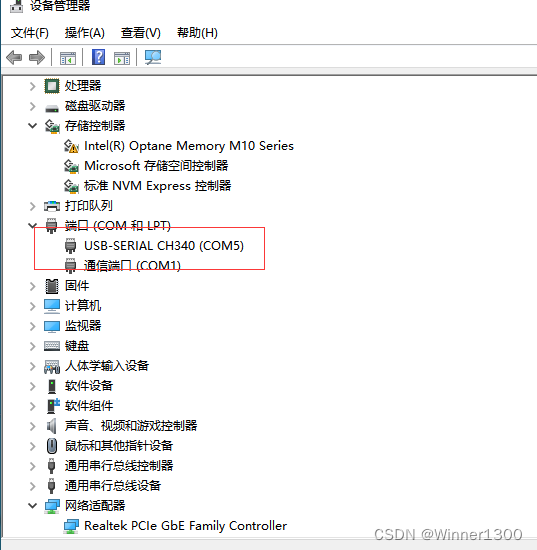
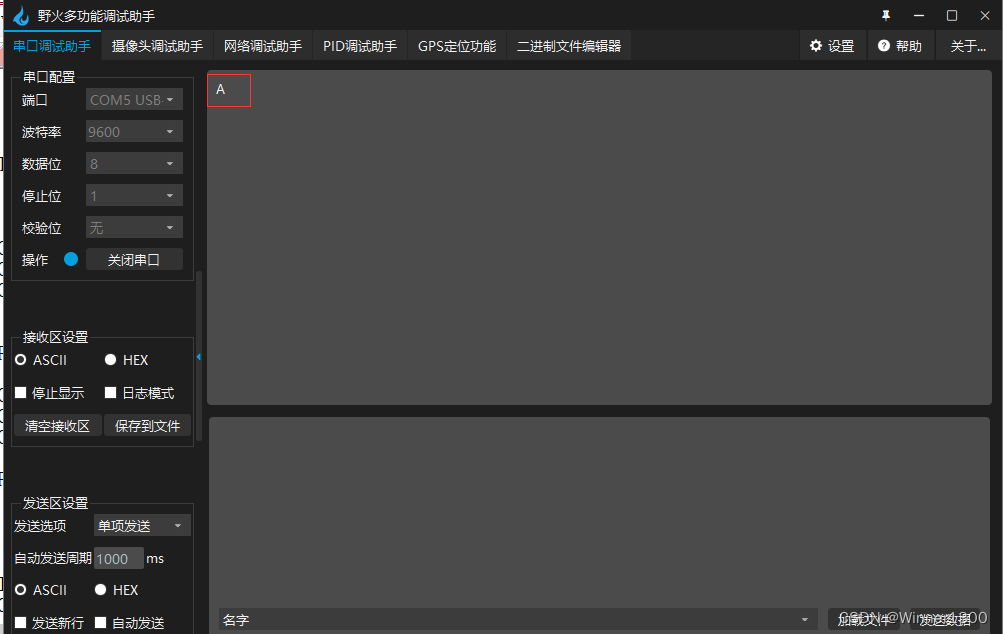
CH340模块的USB插入电脑后在设备管理器上可以找到串口号
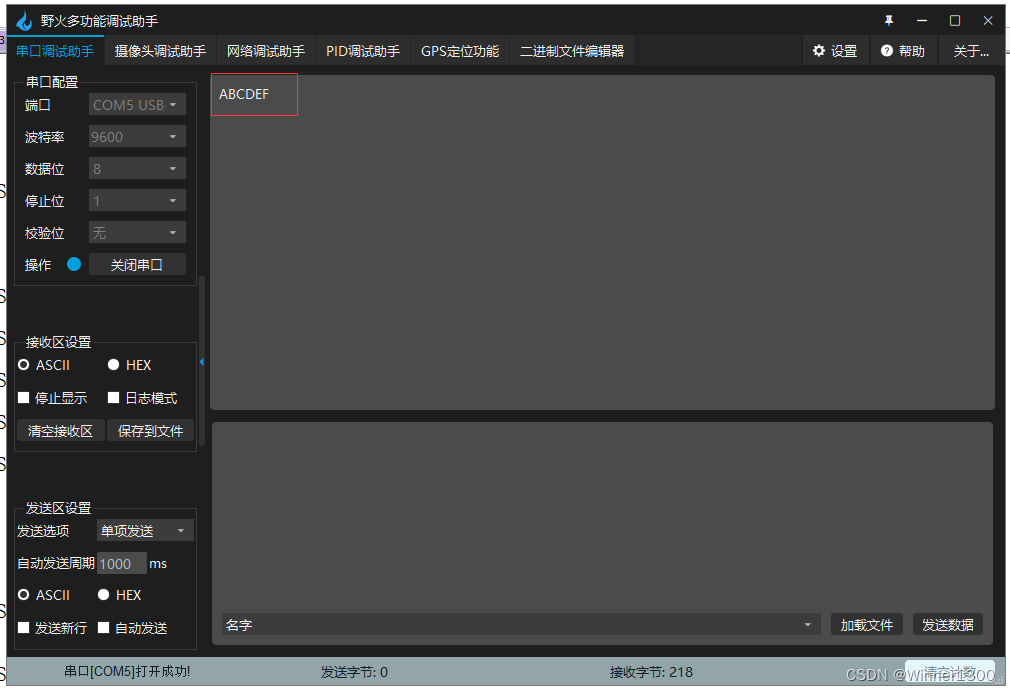
在串口助手上打开对应的串口号,就可以实现串口助手和CH340模块的通信
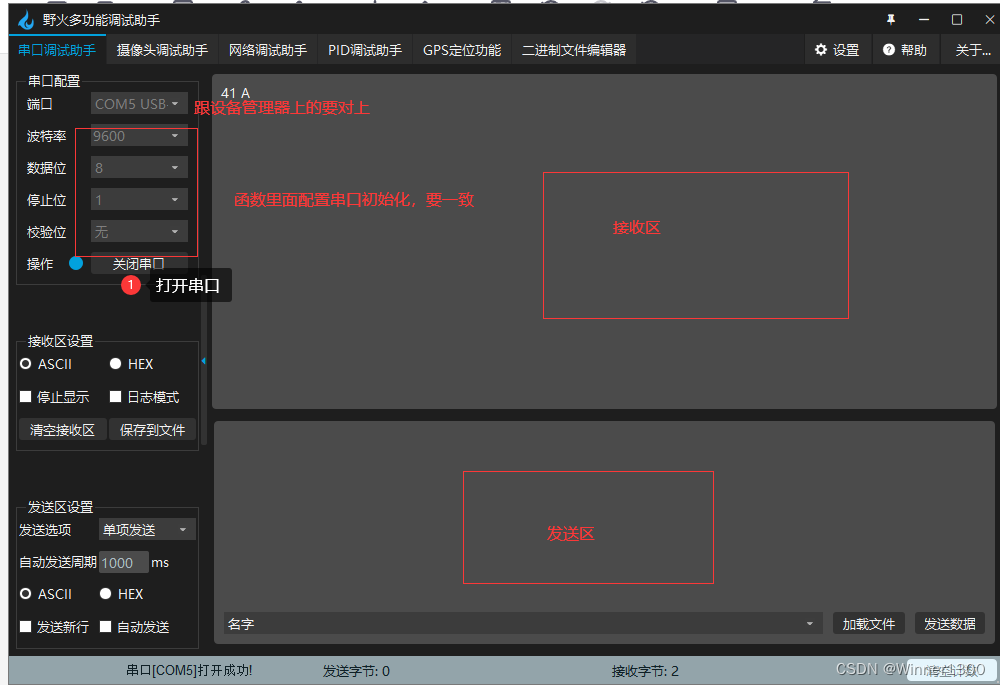
进一步测试板子与CH340的通信与串口助手的通信
2. 测试成功发送了一个字符
3.发送多个字符
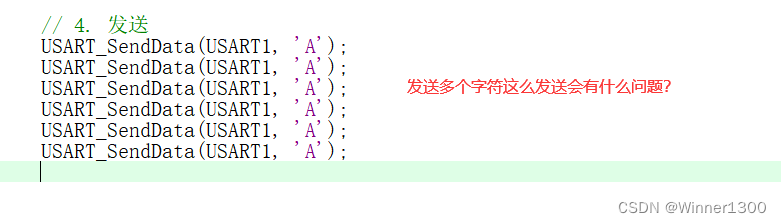
如何解决问题
解决方法:
成功的案列
四、接收字符串比较字符串
使用串口交互代码问题
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "USART.h"
#include "LED.h"
#include "string.h"
#include "stdio.h"
uint8_t Data;//接收一字节数据
unsigned char RX_Str[100];
unsigned char ta[100]={"1234我的名字"};
u16 Rx_FLAG=0; //接收完成标志位
unsigned char hongdeng[]={"红灯"};
int main()
{
USART_INT();//串口初始化
LED_int();//LED初始化
USART_SendData(USART1,'a');//串口能正确接收说明硬件、软件没问题
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
printf("你好吗\r\n");//打印红灯亮信息 红灯亮 \r\n换行
//串口能正确发送说明 发送编码没问题
while(1)
{
if(Rx_FLAG==1)//接收完成标志 Rx_FLAG 为 1
{
if(strcmp(RX_Str,"红灯")==0)//比对接收的字符是否为 红灯
{
LEDR_ON();//红灯亮
printf("红灯亮 \r\n");//打印红灯亮信息 红灯亮 \r\n换行
}
else if(strcmp(RX_Str,"蓝灯")==0)//比对接收的字符是否为 蓝灯
{
LEDB_ON();//蓝灯亮
printf("蓝灯亮 \r\n");//打印蓝灯亮信息 蓝灯亮
}
else if(strcmp(RX_Str,"绿灯")==0)//比对接收的字符是否为 绿灯
{
LEDG_ON();//绿灯亮
printf("绿灯亮 \r\n");//打印绿灯亮信息 绿灯亮
}
else if(strcmp(RX_Str,"关灯")==0)//比对接收的字符是否为 关灯
{
LED_ALLOFF();//灯全灭
printf("已关灯 \r\n");//打印灯灭信息 已关灯
}
else if(strcmp(RX_Str,"我的学号")==0)//比对接收的字符是否为 我的学号
{
printf("学号:2015252525225 \r\n");//打印 学号:2015252525225
}
else if(strcmp(RX_Str,"我的姓名")==0)//比对接收的字符是否为 我的姓名
{
printf("姓名:xxx \r\n");//打印
}
else //若输入指令都不符合 则打印输入指令错误
{
printf("输入指令错误!! \r\n");//打印输入指令错误
}
Rx_FLAG=0;//接收完成标志位置0
}
}
}
/*
通过接收HEX数据包实现交互 包头@ 数据1 数据2 ... 包尾\r\n
利用状态转换思想接收HEX数据包 相当于数电的状态转换 等待转换信号来临进而转换状态
*/
void USART1_IRQHandler() //串口中断函数
{
static u16 RX_zt;//串口接收状态
static u16 i;//字符数组下标
if (USART_GetITStatus(USART1, USART_IT_RXNE)==SET)//当接收标志位为SET 开始接收
{
Data=USART_ReceiveData(USART1);//接收数据
if(RX_zt==0)//若串口接收状态为状态0
{
if(Data==' '&&Rx_FLAG==0)//判断接收到的数据是否为包头 @ 在Rx_FLAG=0情况下接收数据防止数据传输过快错乱
{
RX_zt=1;//转换为状态1
i=0;//字符数组下标置0
}
}
// 123132\r\n
else if(RX_zt==1)//若串口接收状态为状态1
{
if(Data=='\r')//判断是否为包尾字符 不定长HEX数据包接收数据需时刻比对包尾信号
{
RX_zt=2;//转换为状态2
}
else
{
RX_Str[i]=Data;//接收数据存入字符数组
i++;
}
}
else if(RX_zt==2)//若串口接收状态为状态2
{
if(Data=='\n')//再次判断是否为包尾字符
{
RX_zt=0;//转换为状态0
RX_Str[i]='\0';//字符串接收结束
Rx_FLAG=1;//接收完成标志位置1
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);//清除接收标志位
}
}
strcmp函数讲解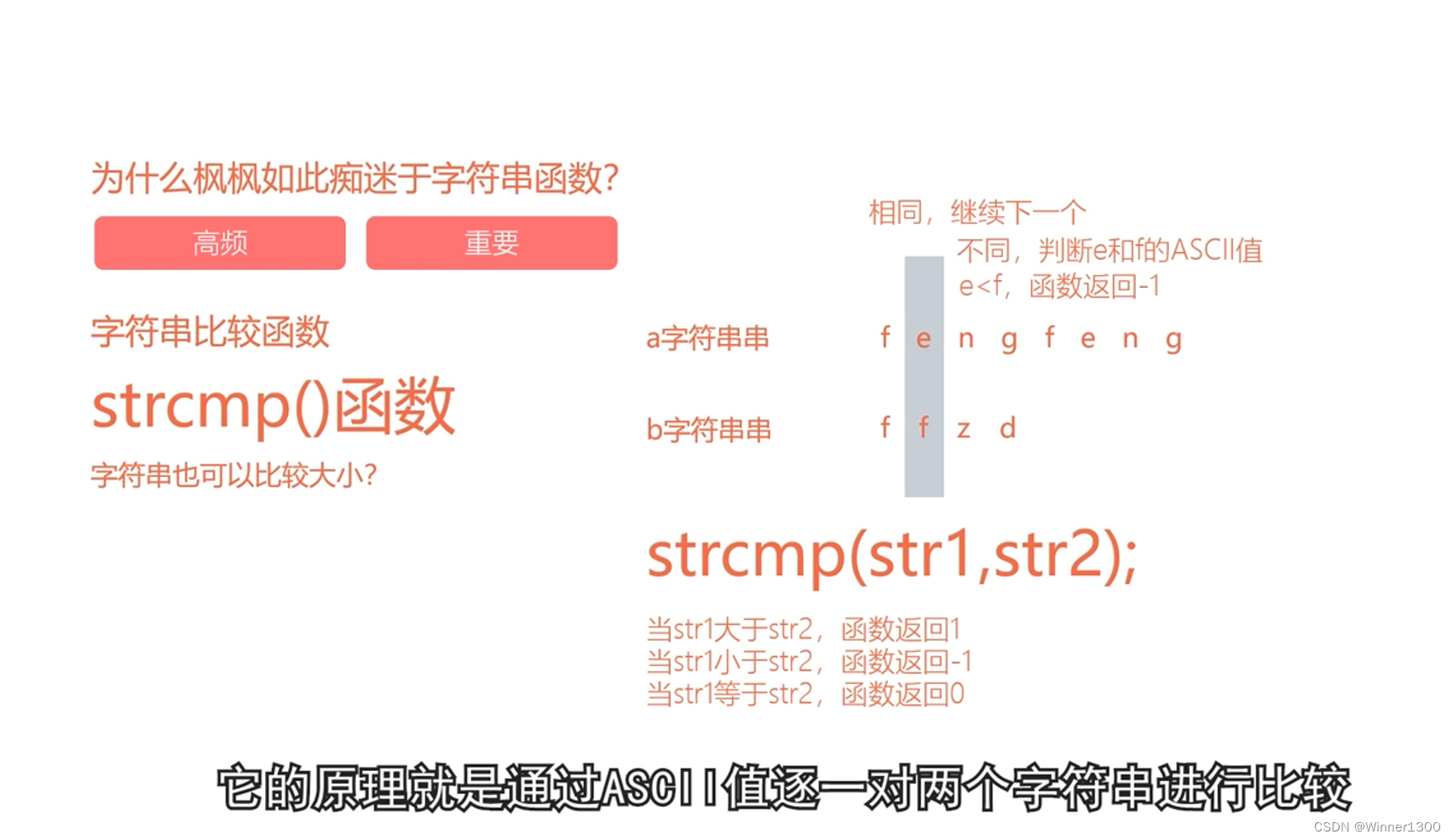
https://baike.baidu.com/item/strcmp/5495571?fr=ge_ala
4.0 发送无回应如何判断
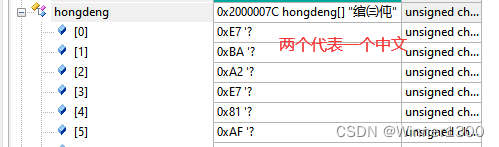
- 1.自己声明一个字符串,然后硬件仿真能 发现显示“红灯” 得到编码错误
-
- 接收字符串回来数组里面得到数据位 “红灯”显示正确
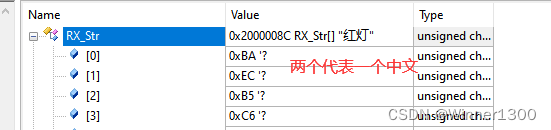
- 接收字符串回来数组里面得到数据位 “红灯”显示正确
-
- 核心问题:32用的是UTF-8编码 ->上位机用的是ANSI编码
4.1 老铁给出的错误分析很好
https://blog.csdn.net/qq_44852376/article/details/128460223
核心问题:32用的是UTF-8编码 ->上位机用的是ANSI编码
4.2 怎么解决?
4.2.1 新建工程重来
新建工程,一开始就用ANSI编码,中间不要随意改动编码
4.2.2 强制编码,改回来
使用nopepad++软件实现

五、手把手操作视频
1. 手把手数据收发视频
STM32 2024-10-23 08-12-09-323
B站视频
https://www.bilibili.com/video/BV1BTyoY6EDk/?vd_source=2f51b53d36c7b878a5128c37eb2800a4
2.手把手串口发送,串口助手和ST32问答教学视频
串口发送接收问答补充2024-11-07 09-40
B站有字幕视频
https://www.bilibili.com/video/BV1SvD1YGEH6/
总结
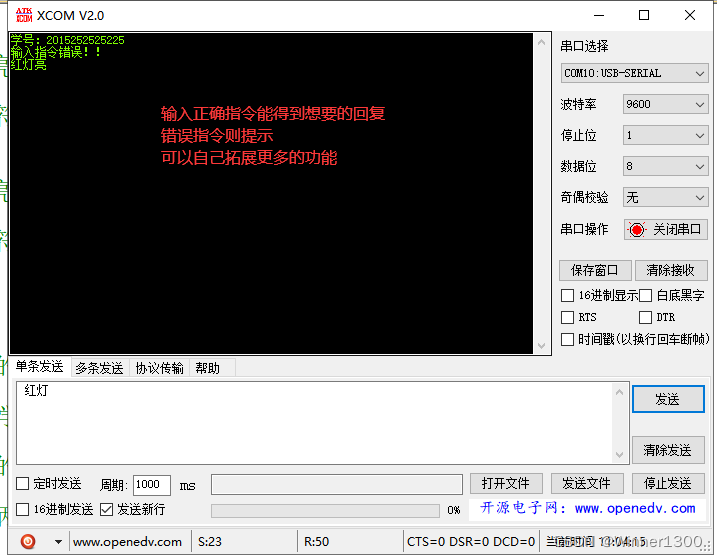
实现对话,发送名字,学号,指定三盏灯的状态,
最有加入了 发送和回复的功能,为上位机 通信奠定了基础!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









