






2.1 目标
写好的机器人程序,我们当然要脱离个人电脑,把这个程序部署到Pepper/Nao机器人内部运行。
2.2 实现思路
机器人的naoqi系统是基于Linux的系统,当然提供了FTP和SSH服务。
这两个服务不需要安装,是机器人自带的。
2.2.1 FTP服务
FTP服务可以向Linux中上传和下载文件,我们通过本服务把python程序上传到机器人中。
2.2.2 SSH服务
SSH服务是Linux远程登录服务,我们可以在个人电脑中远程登录到机器人的Linux中。
2.3 前提准备
2.3.1 在个人电脑安装FTP客户端
推荐安装Filezilla.
2.3.2 在个人电脑安装SSH客户端
Windows系统不带SSH客户端,推荐安装PuTTy
Mac和Linux系统通过ssh命令即可,不需要安装此步骤。
2.4 动手部署Python程序到机器人
2.4.1 修改程序
在个人电脑中,将下面的程序保存到磁盘。例如命名为test.py
注意这里的机器人IP是nao.local。
因为程序是在机器人内部运行,不需要指定局域网IP了。
from naoqi import ALProxy
tts = ALProxy("ALTextToSpeech", "nao.local", 9559)
tts.say("Hello, world!")
2.4.2 上传程序
启动FTP客户端,连接到你的机器人。
按照下面的填写:
- A. Host: 机器人IP
- B. Username: nao
- C. Password: 密码,默认是nao
- D. Port: 21
如图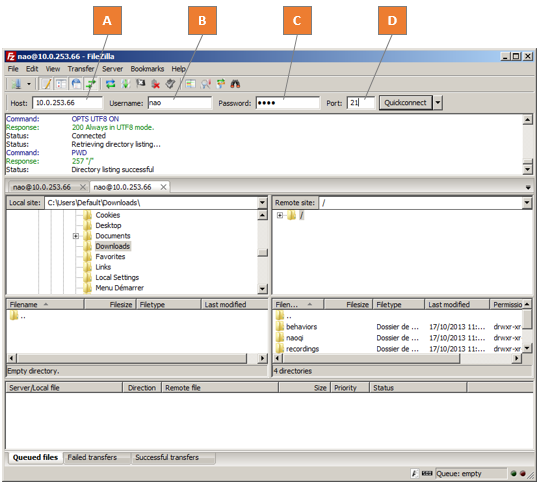
然后把你的python程序上传打机器人中。
2.4.3 启动程序
启动SSH客户端,远程连接到机器人。
在SSH控制台,通过Python启动刚才上传的python文件。
python 你的文件















 588
588











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









