






自动驾驶控制-二/三自由度动力学MPC任意路径跟踪
是可以跟踪各种自定义路径,可以自己更改参考路径的
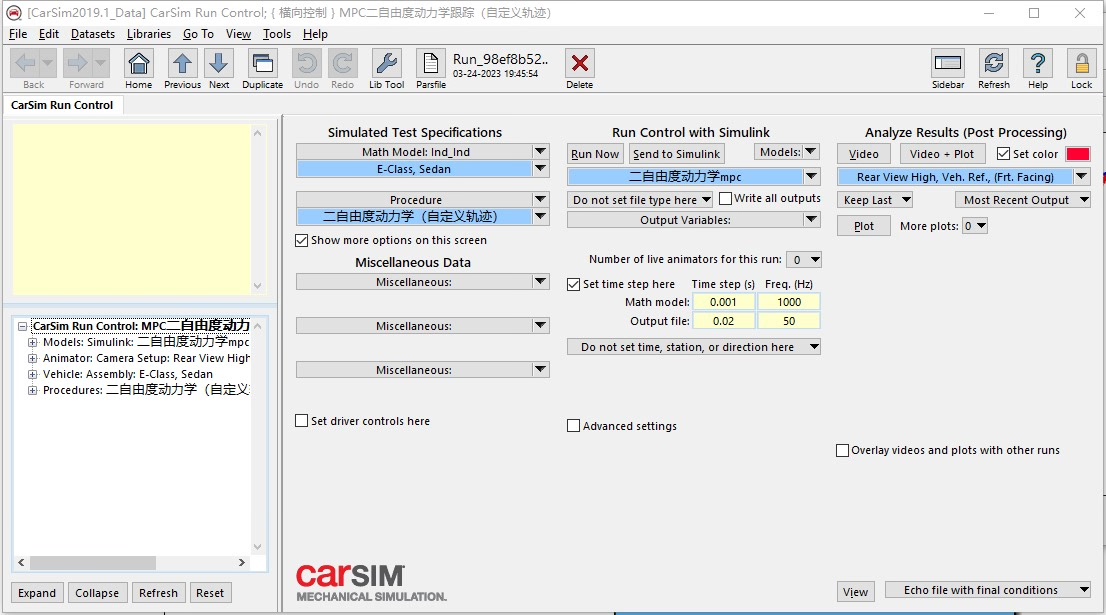
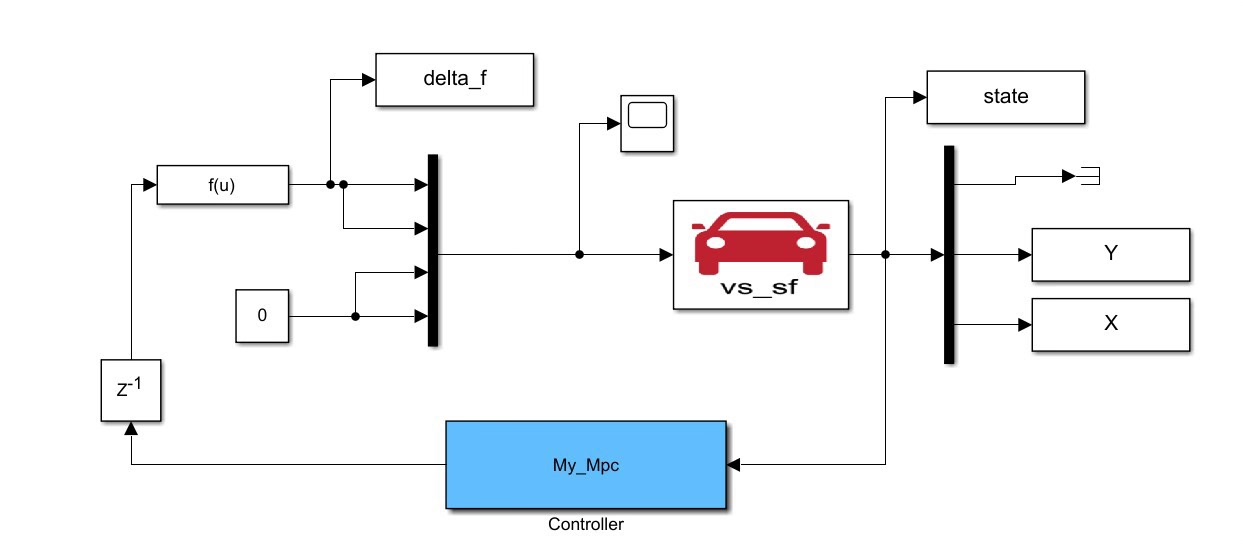
carsim和simulink联合仿真,基于车辆二自由度动力学模型的mpc跟踪任意路径。
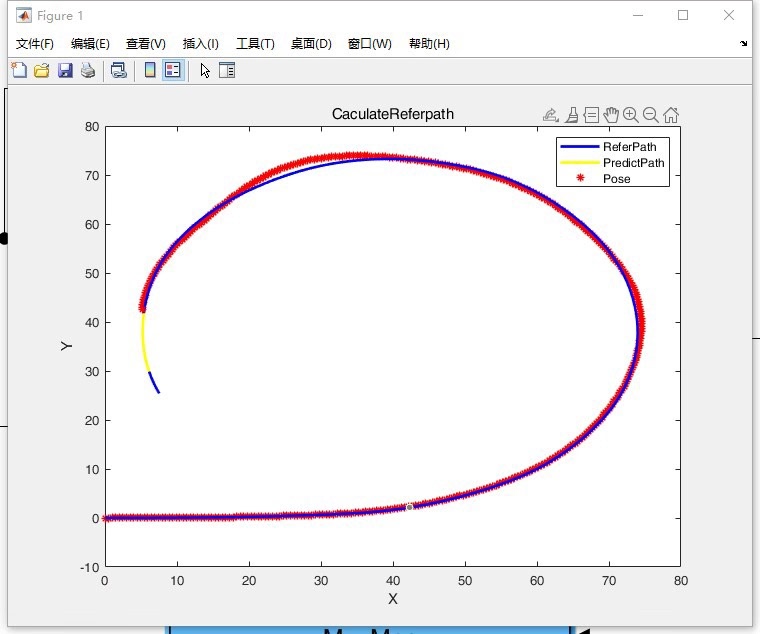
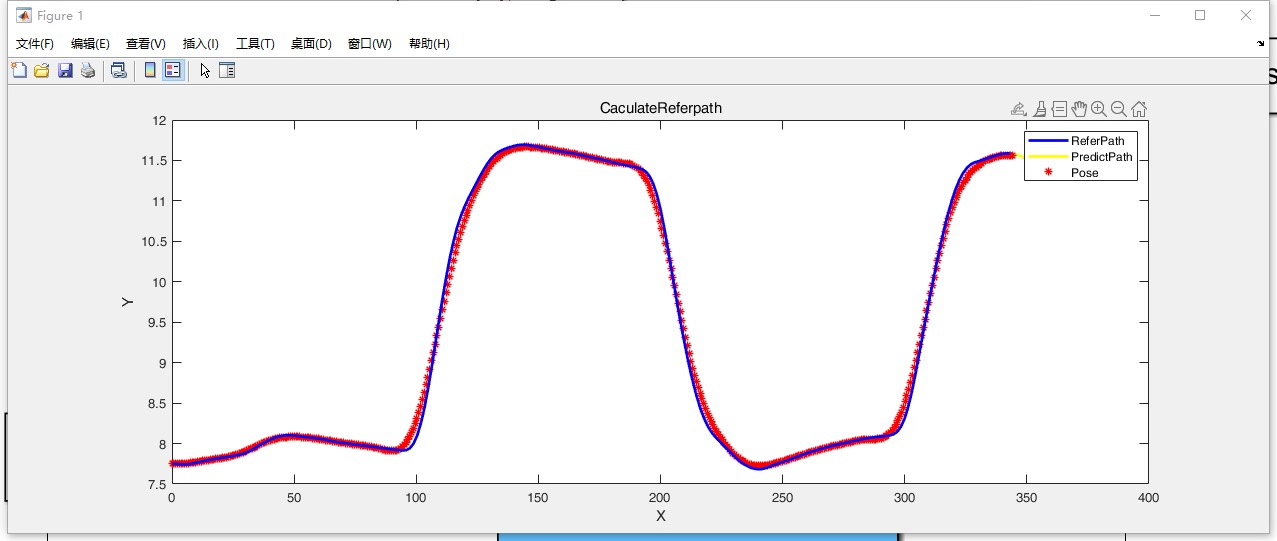
蓝色为全局参考路径,黄色为预测时域内的
参考路径,红色为车辆行驶轨迹。
ID:5870709697111235
阿Xin的自动驾驶小店
自动驾驶技术作为当今科技领域的热点之一,受到了广泛关注和研究。在自动驾驶的控制过程中,路径跟踪是其中的一个重要环节。本文将围绕着自动驾驶控制-二 三自由度动力学MPC任意路径跟踪展开讨论。
在自动驾驶控制中,路径跟踪是车辆实现沿着指定路径行驶的关键技术之一。而MPC(Model Predictive Control,模型预测控制)作为一种先进的控制方法,在自动驾驶中得到了广泛的应用。MPC通过预测车辆的轨迹并优化控制策略,实现了高精度的路径跟踪能力。
基于车辆二自由度动力学模型的MPC路径跟踪方法可以灵活地跟踪各种自定义路径,并且能够在运行过程中实时修改参考路径。通过将Carsim和Simulink进行联合仿真,可以对车辆的动力学特性进行精确建模和仿真,为路径跟踪算法的设计提供准确的参考。蓝色表示全局参考路径,在路径规划时提前规划好的路径;黄色表示预测时域内的参考路径,在每个时间步中通过预测方法确定的路径;红色表示车辆的行驶轨迹,即通过控制策略实现的实际路径。
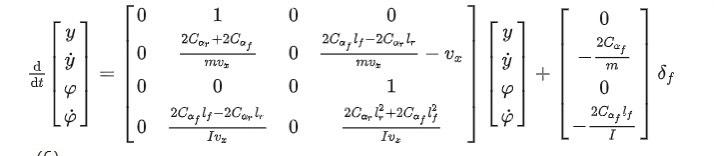
在MPC路径跟踪算法中,首先需要建立车辆的二自由度动力学模型。该模型考虑了车辆的横向和纵向运动,能够较为准确地描述车辆的运动特性。通过对该模型进行状态空间描述,并结合预测控制方法,可以实现对路径跟踪的精细控制。
在路径跟踪过程中,MPC算法不仅仅依靠全局参考路径进行控制,还借助预测时域内的参考路径进行路径优化。通过对预测时域内的路径进行优化,可以有效地减小路径跟踪误差,提高车辆的行驶稳定性和精度。
总结而言,自动驾驶控制-二 三自由度动力学MPC任意路径跟踪是一种能够灵活跟踪各种自定义路径的控制方法。通过Carsim和Simulink的联合仿真,基于车辆二自由度动力学模型的MPC路径跟踪算法能够实现高精度的路径跟踪能力。在实际运行中,该算法结合全局参考路径和预测时域内的参考路径,通过优化控制策略,实现了车辆行驶轨迹的精确控制。未来,随着自动驾驶技术的不断发展,这种基于MPC的路径跟踪方法有望在实际应用中发挥更大的作用。
【相关代码,程序地址】:http://fansik.cn/709697111235.html
















 399
399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









