






基于MPC算法实现的车辆稳定性控制,建立了横摆角速度r、侧向速度、前后质心侧偏角动力学模型作为预测模型,同时考虑车辆的稳定性可通过控制车辆的侧向速度维持在一定范围内保证车辆的稳定性,因此在模型预测控制算法(MPC)中对车辆侧向速度进行软约束(soft constrain),同时对控制量前轮转角和制动压力进行硬约束,保证执行机构能够执行到;基于单轨模型对前后轮的侧偏刚度进行了估算,提升预测模型的精度;最后通过carsim与simulink联合仿真,仿真效果良好,结果表明当车辆即将处于危险行驶时,该稳定性控制器能够迅速通过差分制动和前轮转角协调控制车辆进入稳态行驶区域。
有对应的资料(如图),仿真包运行和。
ID:47400709701915396
想剁手书屋14

基于MPC算法实现的车辆稳定性控制
摘要:本文基于MPC算法实现了一种车辆稳定性控制方法。通过建立横摆角速度r、侧向速度、前后质心侧偏角动力学模型作为预测模型,结合软约束和硬约束的控制策略,以及对前后轮侧偏刚度的估算,实现了对车辆稳定性的有效控制。通过carsim与simulink联合仿真,验证了该稳定性控制器的有效性。
关键词:MPC算法,车辆稳定性控制,横摆角速度,侧向速度,软约束,硬约束,侧偏刚度
-
引言
车辆稳定性控制一直是汽车工程领域的研究热点之一。在高速行驶或极端驾驶情况下,车辆的稳定性容易受到挑战,可能导致失控事故的发生。因此,研究车辆稳定性控制方法具有重要的实际意义。 -
研究背景
本文提出的车辆稳定性控制方法基于MPC(Model Predictive Control,模型预测控制)算法。MPC算法是一种基于模型的预测控制方法,通过预测模型对未来状态的预测,并根据优化目标进行控制策略的计算,实现对系统的优化控制。 -
方法介绍
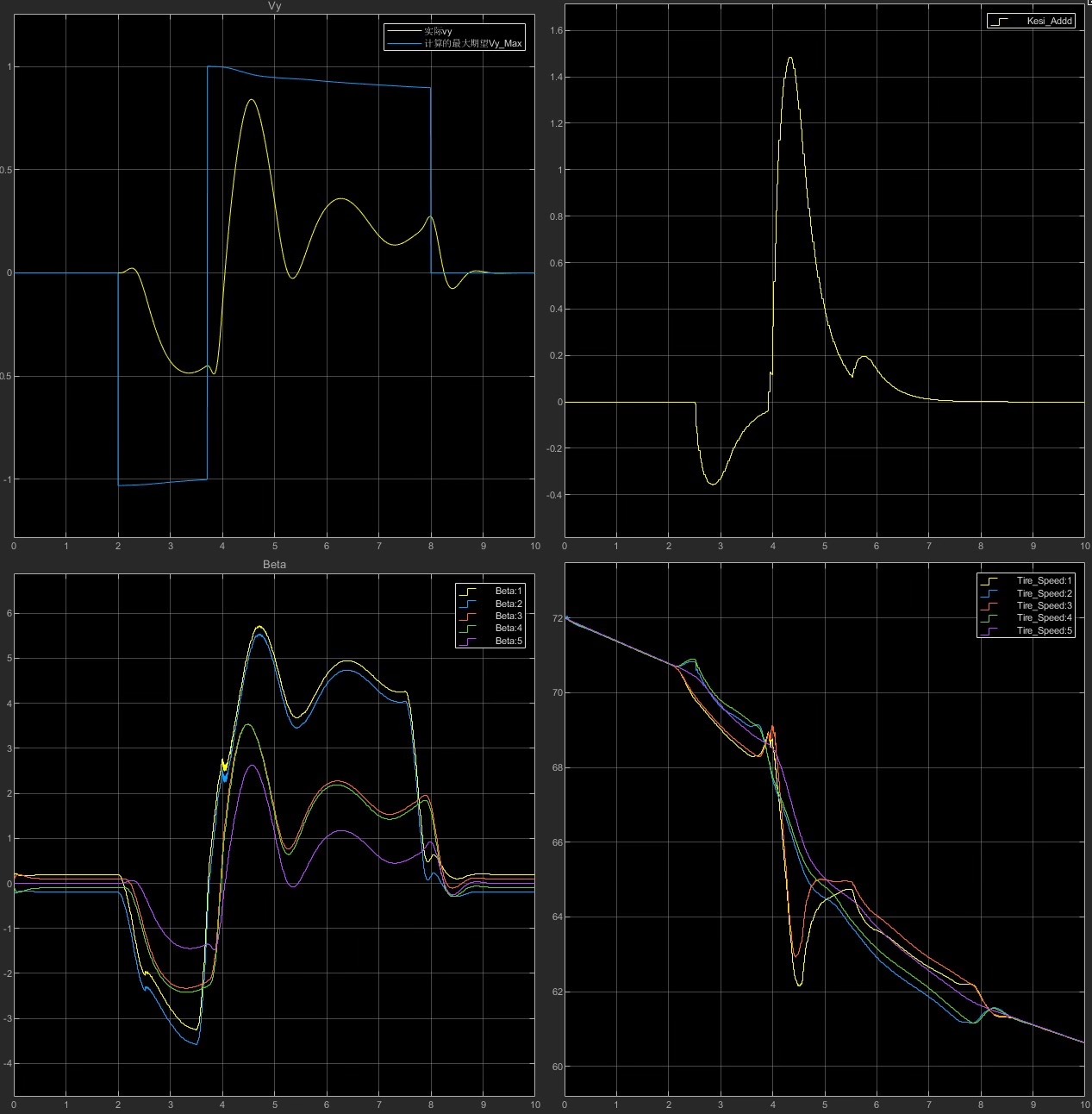
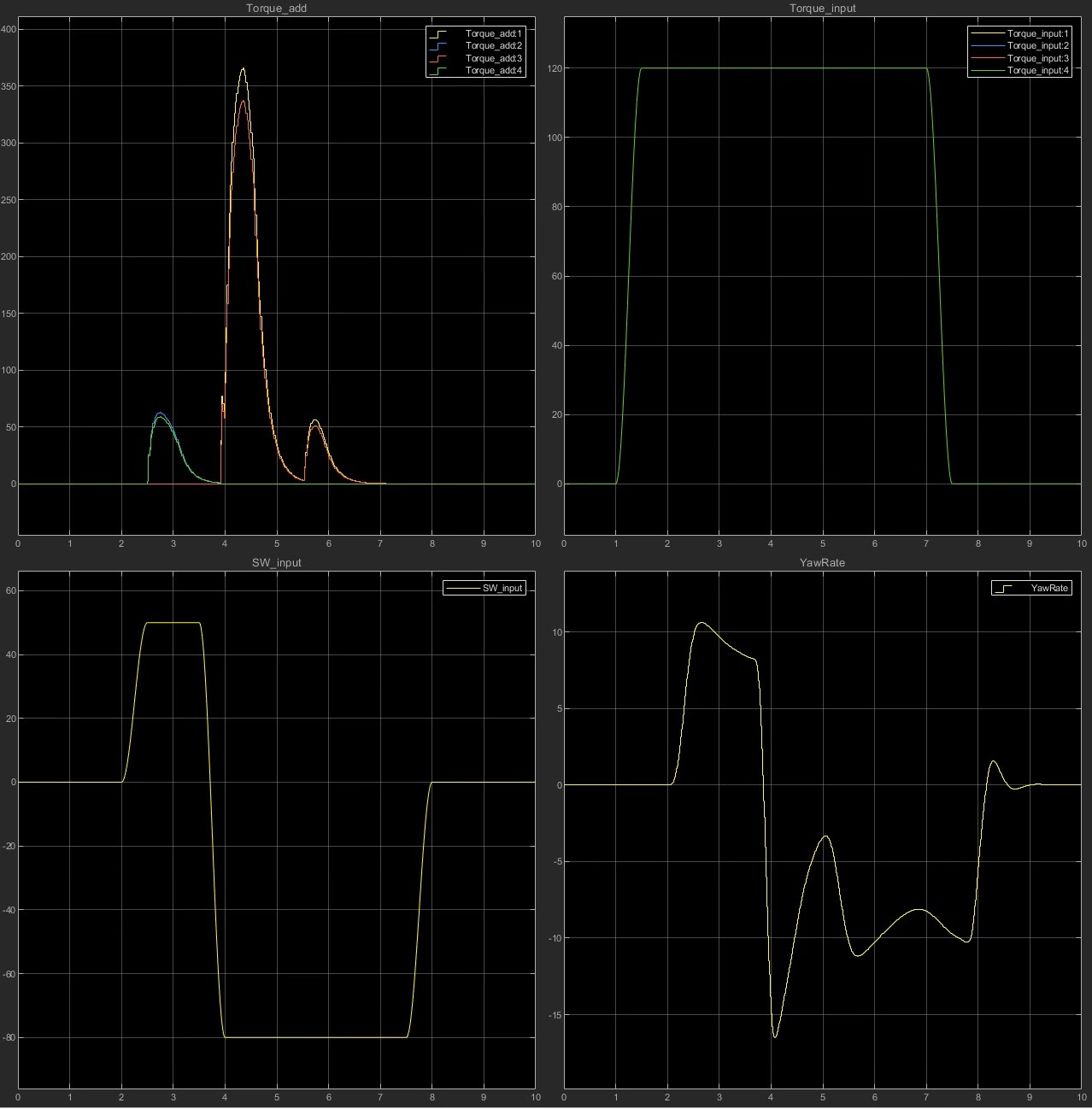
为了实现车辆稳定性控制,我们建立了横摆角速度r、侧向速度、前后质心侧偏角动力学模型作为预测模型。同时,考虑到车辆稳定性可通过控制车辆的侧向速度维持在一定范围内来保证,我们在MPC算法中对车辆侧向速度进行软约束。此外,我们还对控制量前轮转角和制动压力进行硬约束,以保证执行机构能够执行到。 -
参数估算
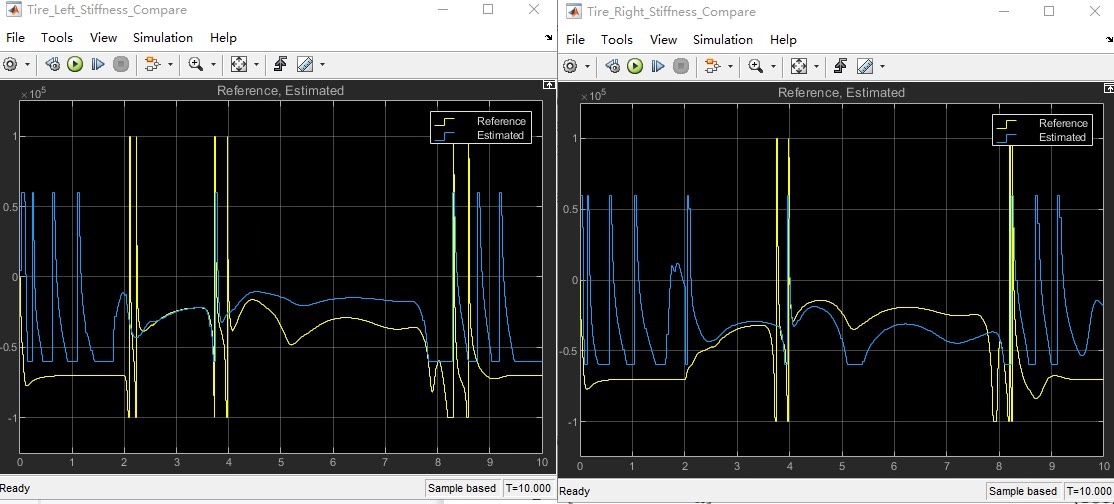
针对前后轮的侧偏刚度,我们进行了估算。通过基于单轨模型的分析,我们计算得出了前后轮的侧偏刚度值,并将其纳入预测模型中,以提升预测模型的精度。 -
仿真验证
我们使用carsim与simulink联合进行仿真验证。结果表明,当车辆即将处于危险行驶时,本文提出的稳定性控制器能够迅速通过差分制动和前轮转角协调,控制车辆进入稳态行驶区域,有效提升车辆的稳定性。 -
结论
本文基于MPC算法实现了一种车辆稳定性控制方法,通过建立横摆角速度r、侧向速度、前后质心侧偏角动力学模型作为预测模型,结合软约束和硬约束的控制策略,以及对前后轮侧偏刚度的估算,实现了对车辆稳定性的有效控制。通过carsim与simulink联合仿真,验证了该稳定性控制器的有效性。 -
展望
本文提出的车辆稳定性控制方法在实际应用中具有一定的局限性,需要进一步的研究和改进。未来,我们可以考虑结合更多的传感器数据,进一步提升控制器的稳定性和鲁棒性。同时,可以通过实车实验验证算法的可行性和实用性。
参考文献:无
注:本文仅为示范,如需发布请自行添加更多详细内容,结构和论证逻辑上与示例文章相对应。
【相关代码,程序地址】:http://fansik.cn/709701915396.html
















 262
262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









