







目录
前言
机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度,这些眼睛亦可称为VO(视觉里程计:单目or立体),维基百科给出的介绍:在机器人和计算机视觉问题中,视觉里程计就是一个通过分析处理相关图像序列来确定机器人的位置和姿态。
当今,由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。而现实世界是三维的,而投射于摄像镜头(CCD/CMOS)上的图像则是二维的,视觉处理的最终目的就是要从感知到的二维图像中提取有关的三维世界信息。
算法原理
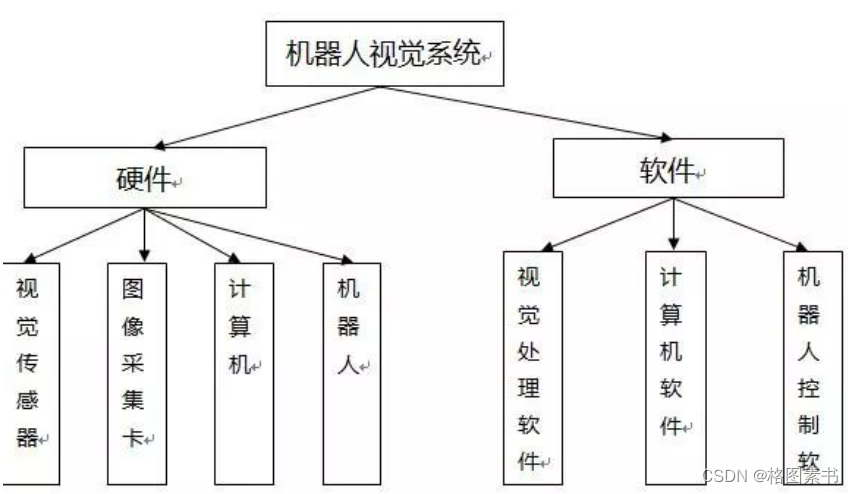
系统基本组成
系统基本组成:CCD、PCI、PC及其外设等。

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 528
528











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











