







目录
3.1 Max-and-Attention Pillar Encoding
3.3 Neck and Center-based Heads
知识储备
液态透镜
光线进入到我们的眼球之后,会经过一个非常重要的部分,叫做晶状体,它里面包裹着的是柔软、透明的蛋白质,可以把它想象成一个枣核型的果冻。外界光线在晶状体的折射下,会非常准确地聚焦在眼球最后方的视网膜上。人类之所以能够看清不同距离的物体,正是因为眼球中的睫状肌能够自动调整眼球中晶状体的弧度,从而改变不同光线的折射角度使其准确地聚焦在视网膜上。所以当你看远处的物体时,眼前的近处物体就开始模糊;反之,当注视到眼前的物体时,远处的物体却开始出现虚化。
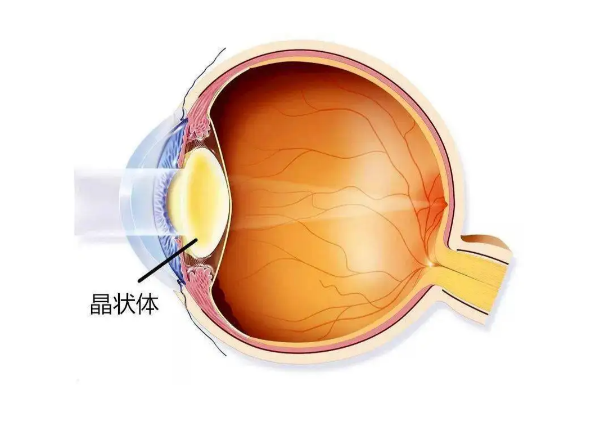

图1(a)人眼结构示意图,(b)液态镜头示意图
本质上透镜成像和我们人眼观察并且记录影像的方式是一样的。液态透镜是使用一种或多种液体制作而成的一个

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 237
237











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











