







计算机视觉—相机标定
brycezou@163.com
0、预备知识
下图基本展示了一些重要的概念:点 O 与
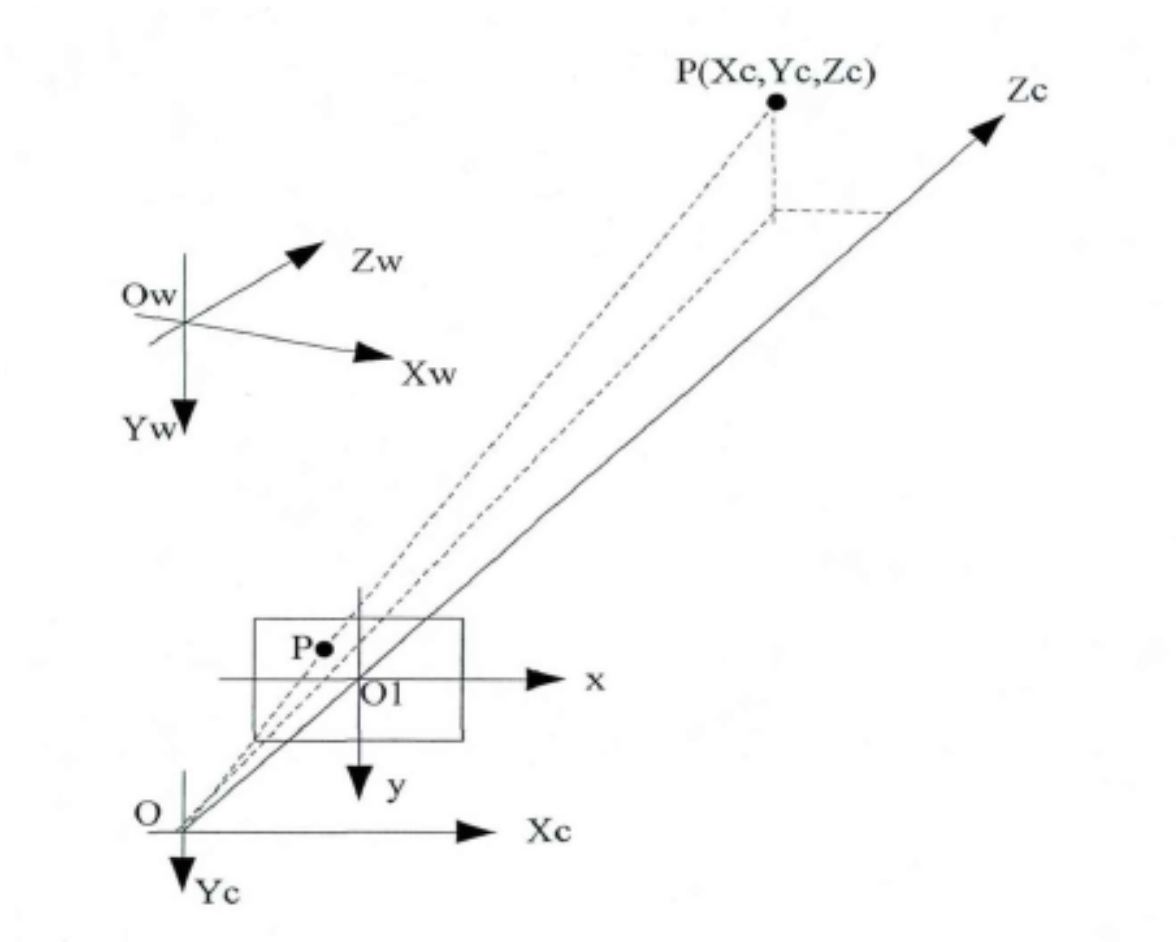
此图来自网络,非作者原创,若侵犯到您的权益,请留言,以便标明出处,谢谢
1、世界坐标系 → 相机坐标系
设 (Xw,Yw,Zw) 表示世界坐标系中的点, (Xc,Yc,Zc) 表示相机坐标系中的点,则世界坐标系到相机坐标系的变换,其实就是一个刚体变换,可以由旋转矩阵 R 和平移矩阵
R⎡⎣⎢⎢XwYwZw⎤⎦⎥⎥+t=⎡⎣⎢⎢XcYcZc⎤⎦⎥⎥
其中, R 为
[R3x301x3t3x111x1]⎡⎣⎢⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢XcYcZc1⎤⎦⎥⎥⎥⎥
2、相机坐标系 → 理想图像物理坐标系(成像平面坐标系)
设 (x,y) 是图像物理坐标系中的点, 由于点 (Xc,Yc,Zc) 和相机坐标系的原点(相机光心)之间的连线,穿过图像物理坐标系所在的平面,因此,由相似三角形可得
Xcx=Zcf,Ycy=Zcf
进一步整理可得
[f00f][XcYc]=Zc[xy]
化为齐次坐标形式
⎡⎣⎢⎢f000f0001000⎤⎦⎥⎥⎡⎣⎢⎢⎢⎢XcYcZc1⎤⎦⎥⎥⎥⎥=Zc⎡⎣⎢⎢xy1⎤⎦⎥⎥
3、图像物理坐标系 → 图像像素坐标系
以图像的左上角为原点建立图像像素坐标系 (u,v) ,并且让 u 轴与
u−u0=xdx,v−v0=ydy
进一步整理可得
[uv]=⎡⎣⎢⎢⎢1dx001dy⎤⎦⎥⎥⎥[xy]+[u0v0]
化为齐次坐标形式
⎡⎣⎢⎢⎢⎢⎢1dx0001dy0u0v01⎤⎦⎥⎥⎥⎥⎥⎡⎣⎢⎢xy1⎤⎦⎥⎥=⎡⎣⎢⎢uv1⎤⎦⎥⎥
4、结论
将相关矩阵相乘,便可以得到三维空间点坐标到图像像素坐标的映射
Zc⎡⎣⎢⎢uv1⎤⎦⎥⎥=⎡⎣⎢⎢⎢⎢⎢1dx0001dy0u0v01⎤⎦⎥⎥⎥⎥⎥⎡⎣⎢⎢f000f0001000⎤⎦⎥⎥[R3x301x3t3x111x1]⎡⎣⎢⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢α000β0u0v01000⎤⎦⎥⎥[R3x301x3t3x111x1]⎡⎣⎢⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥⎥=M1M2⎡⎣⎢⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥⎥
其中, M1 为相机的内参数, M2 为相机的外参数,包括旋转和平移矩阵。















 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









