









本文解析Dynamic window based approach to mobile robot motion control in the presence of moving obstacles
文章主旨:
文章将全局规划FD*(focused D*)和DWA合起来一起用,由全局规划指导一条不发生碰撞的路径(更重要的是他不会落到局部最优解),然后再用dwa方法去做局部规划。
对于局部最优问题,文章中指出:
大概这个意思,通过全局信息避免局部规划算法落到local optima. 然后文章说自己用了三个方法,让自己的基于文献[15]的混合算法进一步优化,变得更加好。文献[15]讲的啥且让我去看看再来写。
什么是FD?*
大概介绍如下,有兴趣看下文献[5]
什么是DWA?
我上一篇讲的已经比较明白了:DWA动态窗口法的原理及应用
四点改进
1. 代价函数混合了FD 和 DWA*

这里的theta_clear 就是计算robot有多靠近障碍物:

这里具体的使用碰撞时间来表示有多靠近障碍物的。另外,还要指出,文中说不是直接算robot到障碍物距离,我们在障碍物外面还要圈一个和robot速度相关的contour, 如果我的robot速度越快,那这个contour越大,这也是为了避免危险做的设计。
第二个theta_path意思是轨迹离全局规划轨迹有多远。

这里面还谈到了如何应对移动障碍物的问题:
很简单,我用dwa对自己做了预测, 那我也对障碍物做个预测,这也是有点鬼扯,预测的准吗?在预测的准的前提下,看看两条轨迹有没有碰撞,(注意,预测时间相同,两条轨迹的index也相同,这样方便比较)。如果有碰撞,那就把这条轨迹舍弃掉。
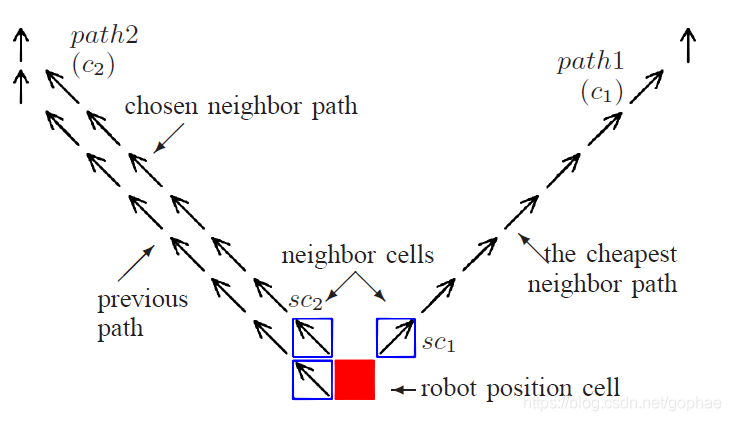
2. 避免相邻轨迹震荡
意思就是我们可能遇到一些对称情况,导致两个轨迹方案cost差不多,方向却差了很多:
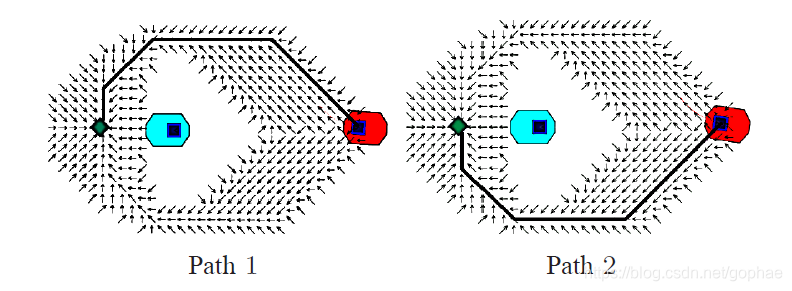
怎么办呢?搞一个减少变化的限制,只有当完全相反的那条曲线比之前规划轨迹周围相邻的轨迹更加好时才回去选用。我觉得有点扯,不如直接用tie breaker来的直接。
**3.**安全代价面罩
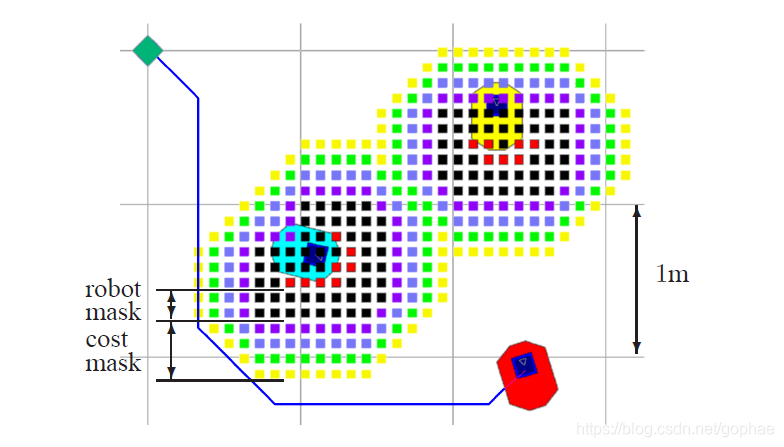
依旧是鬼扯,说在障碍物周围扩大一块区域,不让车子过,这样就会让车子绕开往外走。当然这样直接就禁止掉了图中通过通过直行穿过两个障碍物的最短路径了。

















 986
986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









