







卡尔曼滤波-KalmanFilter
更多内容,请关注:
github:https://github.com/gotonote/Autopilot-Notes.git
一、简介
对于这个滤波器,我们几乎可以下这么一个定论:只要是存在不确定信息的动态系统,卡尔曼滤波就可以对系统下一步要做什么做出有根据的推测。即便有噪声信息干扰,卡尔曼滤波通常也能很好的弄清楚究竟发生了什么,找出现象间不易察觉的相关性。
因此卡尔曼滤波非常适合不断变化的系统,它的优点还有内存占用较小(只需保留前一个状态)、速度快,是实时问题和嵌入式系统的理想选择。
如果你曾经Google过卡尔曼滤波的教程(如今有一点点改善),你会发现相关的算法教程非常可怕,而且也没具体说清楚是什么。事实上,卡尔曼滤波很简单,如果我们以正确的方式看它,理解是很水到渠成的事。
本文会用大量清晰、美观的图片和颜色来解释这个概念,读者只需具备概率论和矩阵的一般基础知识。
二、机器人实例分析
(一)场景
一个可以在树林里四处溜达的小机器人,为了让它实现导航,机器人需要知道自己所处的位置。

也就是说,机器人有一个包含位置信息和速度信息的状态 x ⃗ k {\vec{x}_k} xk :
x ⃗ k = ( p ⃗ , v ⃗ ) {\vec{x}_k} = (\vec{p}, \vec{v}) xk=(p,v)
注意,在这个例子中,状态是位置和速度,放进其他问题里,它也可以是水箱里的液体体积、汽车引擎温度、触摸板上指尖的位置,或者其他任何数据。
我们的小机器人装有GPS传感器,定位精度10米。虽然一般来说这点精度够用了,但我们希望它的定位误差能再小点,毕竟树林里到处都是土坑和陡坡,如果机器人稍稍偏了那么几米,它就有可能滚落山坡。所以GPS提供的信息还不够充分。

我们也可以预测机器人是怎么移动的:它会把指令发送给控制轮子的马达,如果这一刻它始终朝一个方向前进,没有遇到任何障碍物,那么下一刻它可能会继续坚持这个路线。但是机器人对自己的状态不是全知的:它可能会逆风行驶,轮子打滑,滚落颠簸地形……所以车轮转动次数并不能完全代表实际行驶距离,基于这个距离的预测也不完美。
这个问题下,GPS为我们提供了一些关于状态的信息,但那是间接的、不准确的;我们的预测提供了关于机器人轨迹的信息,但那也是间接的、不准确的。
但以上就是我们能够获得的全部信息,在它们的基础上,我们是否能给出一个完整预测,让它的准确度比机器人搜集的单次预测汇总更高?用了卡尔曼滤波,这个问题可以迎刃而解。
(二)相关性分析
还是上面这个问题,我们有一个状态,它和速度、位置有关:
x ⃗ k = [ p v ] {\vec{x}_k} = \left[ \begin{matrix} p \\ v \\ \end{matrix} \right] xk=[pv]
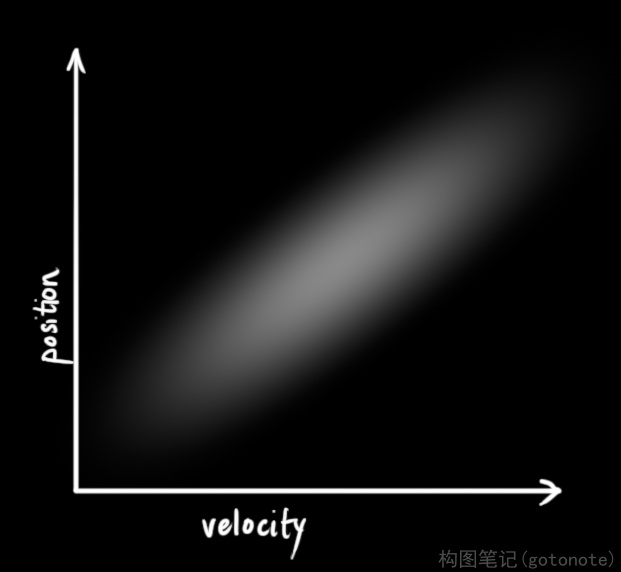
我们不知道它们的实际值是多少,但掌握着一些速度和位置的可能组合,其中某些组合的可能性更高:

卡尔曼滤波假设两个变量(在我们的例子里是位置和速度)都应该是随机的,而且符合高斯分布。每个变量都有一个均值
μ
\mu
μ ,它是随机分布的中心;有一个方差
σ
2
\sigma^2
σ2 ,它衡量组合的不确定性。

在上图中,位置和速度是不相关的,这意味着我们不能从一个变量推测另一个变量。那么如果位置和速度相关呢?如下图所示,机器人前往特定位置的可能性取决于它拥有的速度。
这不难理解,如果基于旧位置估计新位置,我们会产生这两个结论:如果速度很快,机器人可能移动得更远,所以得到的位置会更远;如果速度很慢,机器人就走不了那么远。
这种关系对目标跟踪来说非常重要,因为它提供了更多信息:一个可以衡量可能性的标准。这就是卡尔曼滤波的目标:从不确定信息中挤出尽可能多的信息!
为了捕获这种相关性,我们用的是协方差矩阵。简而言之,矩阵的每个值是第
i
i
i 个变量和第
j
j
j 个变量之间的相关程度(由于矩阵是对称的,
i
i
i 和
j
j
j 的位置可以随便交换)。我们用
Σ
\Sigma
Σ 表示协方差矩阵,在这个例子中,就是
Σ
i
j
\Sigma_{ij}
Σij 。

(三)矩阵描述
为了把以上关于状态的信息建模为高斯分布(图中色块),我们还需要 k k k 时的两个信息:最佳估计 x k ^ {\hat{x_k}} xk^ (均值,也就是 μ \mu μ ),协方差矩阵 P k {P_k} Pk 。(虽然还是用了位置和速度两个变量,但只要和问题相关,卡尔曼滤波可以包含任意数量的变量)
x ^ k = [ p o s i t i o n v e l o c i t y ] {\hat{x}_k} = \left[ \begin{matrix} position \\ velocity \\ \end{matrix} \right] x^k=[positionvelocity]
P k = [ Σ p p Σ p v Σ v p Σ v v ] {P_k} = \left[ \begin{matrix} \Sigma_{pp} & \Sigma_{pv} \\ \Sigma_{vp} & \Sigma_{vv} \\ \end{matrix} \right] Pk=[ΣppΣvpΣpvΣvv]
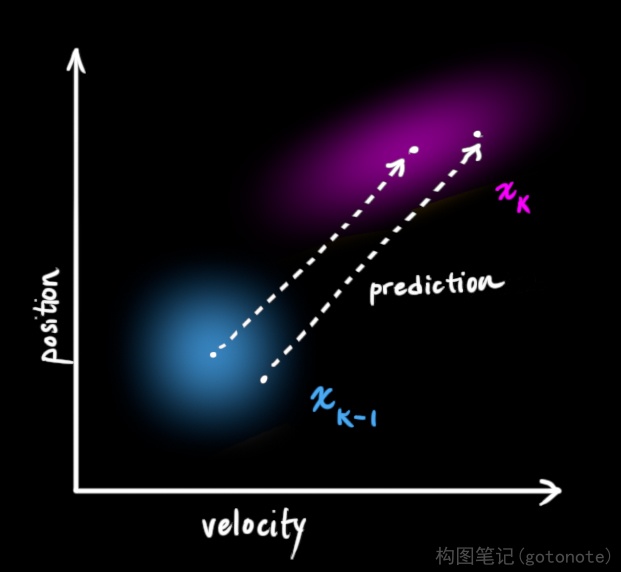
接下来,我们要通过查看当前状态(k-1 时)来预测下一个状态(k 时)。这里我们查看的状态不是真值,但预测函数无视真假,可以给出新分布:
我们可以用矩阵
F
k
{F_k}
Fk 表示这个预测步骤:

它从原始预测中取每一点,并将其移动到新的预测位置。如果原始预测是正确的,系统就会移动到新位置。
这是怎么做到的?为什么我们可以用矩阵来预测机器人下一刻的位置和速度?下面是个简单公式:
P k = P k − 1 + △ t v k − 1 \color{Magenta}{P_k} = \color{Blue}P_{k-1} + \color{Black}\triangle t\color{Blue}v_{k-1} Pk=Pk−1+△tvk−1
v k = v k − 1 \color{Magenta}v_{k} = \quad\quad\quad\quad \color{Blue}v_{k-1} vk=vk−1
转换成矩阵形式:
x k ^ = [ 1 △ t 0 1 ] x ^ k − 1 \color{Magenta}{\hat{x_k}} \color{Black}= \left[ \begin{matrix} 1 & \triangle t \\ 0 & 1 \\ \end{matrix} \right] \color{Blue}{\hat{x}_{k-1}} xk^=[10△t1]x^k−1
= F k x ^ k − 1 =\quad{F_k}\color{Blue}{\hat{x}_{k-1}} =Fkx^k−1
这是一个预测矩阵,它能给出机器人的下一个状态,但目前我们还不知道协方差矩阵的更新方法。这也是我们要引出下面这个等式的原因:如果我们将分布中的每个点乘以矩阵A,那么它的协方差矩阵会发生什么变化
C o v ( x ) = Σ Cov(x) = \Sigma Cov(x)=Σ
C o v ( A x ) = A Σ A T Cov(\color{Red}A\color{Black}x) = \color{Red}A \color{Black}{\Sigma} \color{Red}A^T Cov(Ax)=AΣAT
把这个式子和上面的最佳估计 x ^ {\hat{x}} x^ 结合,可得:
x ^ = F k x ^ k − 1 \color{Red}{\hat{x}} \color{Black} = {F_k} \color{Blue}{\hat{x}_{k-1}} x^=Fkx^k−1
P k = F k P k − 1 F k T \color{Red}P_k \color{Black} = \color{Black}F_k \color{Blue}P_{k-1} \color{Black}F_k^T Pk=FkPk−1FkT
1. 外部影响
但是,除了速度和位置,外因也会对系统造成影响。比如模拟火车运动,除了列车自驾系统,列车操作员可能会手动调速。在我们的机器人示例中,导航软件也可以发出停止指令。对于这些信息,我们把它作为一个向量 μ ⃗ k \vec{\mu}_k μk ,纳入预测系统作为修正。
假设油门设置和控制命令是已知的,我们知道火车的预期加速度 。根据运动学基本定理,我们可得:
P k = P k − 1 + △ t v k − 1 + 1 2 a △ t 2 \color{Magenta}{P_k} = \color{Blue}{P_{k-1}} + \color{Black}{\triangle t}\color{Blue}{v_{k-1}} + \color{Black}{\frac{1}{2}}\color{Darkorange}a\color{Block}{\triangle{t^2}} Pk=Pk−1+△tvk−1+21a△t2
v k = v k − 1 + a △ t \color{Magenta}v_{k} = \quad\quad\quad\quad\quad \color{Blue}v_{k-1} \color{Block}+ \color{Darkorange}a \color{Block}\triangle{t} vk=vk−1+a△t
把它转成矩阵形式:
x k ^ = F k x ^ k − 1 [ △ t 2 2 △ t ] a \color{Magenta}{\hat{x_k}} \color{Black}= {F_k} \color{Blue}{\hat{x}_{k-1}} \color{Block}{ \left[ \begin{matrix} \frac{\triangle{t^2}}{2} \\ \triangle{t} \\ \end{matrix} \right]} \color{Darkorange}a xk^=Fkx^k−1[2△t2△t]a
= F k x ^ k − 1 + B k u ⃗ k = {F_k}\color{Blue}{\hat{x}_{k-1}} \color{Block} + {B_k} \color{Darkorange}{\vec{u}_k} =Fkx^k−1+Bkuk
B k {B_k} Bk 是控制矩阵, u ⃗ k {\vec{u}_k} uk 是控制向量。如果外部环境异常简单,我们可以忽略这部分内容,但是如果添加了外部影响后,模型的准确率还是上不去,这又是为什么呢?
2. 外部不确定性
当一个国家只按照自己的步子发展时,它会自生自灭。当一个国家开始依赖外部力量发展时,只要这些外部力量是已知的,我们也能预测它的存亡。
但是,如果存在我们不知道的力量呢?当我们监控无人机时,它可能会受到风的影响;当我们跟踪轮式机器人时,它的轮胎可能会打滑,或者粗糙地面会降低它的移速。这些因素是难以掌握的,如果出现其中的任意一种情况,预测结果就难以保障。
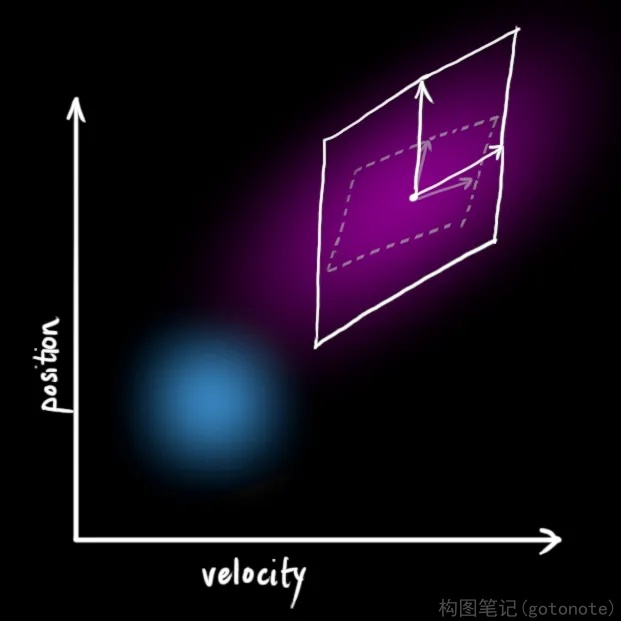
这要求我们在每个预测步骤后再加上一些新的不确定性,来模拟和“世界”相关的所有不确定性:

如图9所示,加上外部不确定性后,
x
^
k
−
1
{\hat{x}_{k-1}}
x^k−1 的每个预测状态都可能会移动到另一点,也就是蓝色的高斯分布会移动到紫色高斯分布的位置,并且具有协方差
Q
k
{Q_k}
Qk 。换句话说,我们把这些不确定影响视为协方差
Q
k
{Q_k}
Qk 的噪声。

这个紫色的高斯分布拥有和原分布相同的均值,但协方差不同,如下图11所示。
我们在原式上加入 Q k {Q_k} Qk :
x k ^ = F k x ^ k − 1 + B k u ⃗ k \color{Magenta}{\hat{x_k}} \color{Black} = {F_k} \color{Blue}{\hat{x}_{k-1}} \color{Block} + B_k \color{Darkorange}{\vec{u}_k} xk^=Fkx^k−1+Bkuk
P k = F k P k − 1 F k T + Q k \color{Magenta}P_k \color{Black}= \color{Black}F_k \color{Blue}P_{k-1} \color{Black}F_k^T + \color{SpringGreen}Q_k Pk=FkPk−1FkT+Qk
简而言之,这里:
新的最佳估计
\color{Magenta}{新的最佳估计}
新的最佳估计 是基于
原最佳估计
\color{Blue}{原最佳估计}
原最佳估计 和
已知外部影响
\color{Darkorange}{已知外部影响}
已知外部影响 校正后得到的预测。
新的不确定性 \color{Magenta}{新的不确定性} 新的不确定性 是基于 原不确定性 \color{Blue}{原不确定性} 原不确定性 和 外部环境的不确定性 \color{SpringGreen}{外部环境的不确定性} 外部环境的不确定性 得到的预测。
现在,有了这些概念介绍,我们可以把传感器数据输入其中。
(四)通过测量来细化估计值
我们可能有好几个传感器,它们一起提供有关系统状态的信息。传感器的作用不是我们关心的重点,它可以读取位置,可以读取速度,重点是,它能告诉我们关于状态的间接信息——它是状态下产生的一组读数。
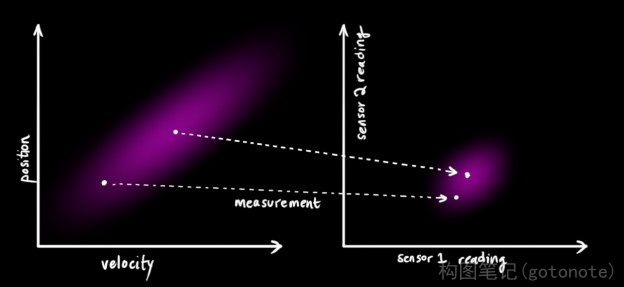
请注意,读数的规模和状态的规模不一定相同,所以我们把传感器读数矩阵设为
H
k
{H_k}
Hk 。

把这些分布转换为一般形式:
μ ⃗ e x p e c t e d = H k x ^ k {\vec{\mu}_{expected}} = {H_k}\color{Magenta}{\hat{x}_k} μexpected=Hkx^k
Σ e x p e c t e d = H k P k H k T {\Sigma_{expected}} = {H_k}\color{Magenta}P_k\color{Block}H_k^T Σexpected=HkPkHkT
卡尔曼滤波的一大优点是擅长处理传感器噪声。换句话说,由于种种因素,传感器记录的信息其实是不准的,一个状态事实上可以产生多种读数。
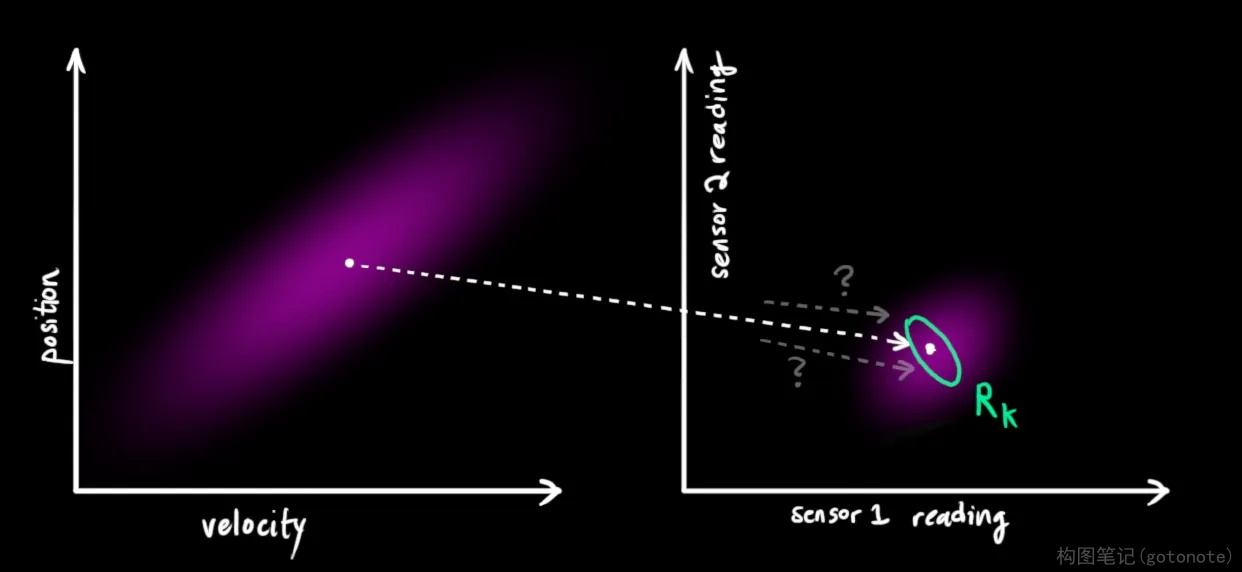
我们将这种不确定性(即传感器噪声)的协方差设为 R k {R_k} Rk ,读数的分布均值设为 z k {z_k} zk 。
现在我们得到了两块高斯分布,一块围绕预测的均值,另一块围绕传感器读数。

如果要生成靠谱预测,模型必须调和这两个信息。也就是说,对于任何可能的读数 ( z 1 , z 2 ) ({z_1},{z_2}) (z1,z2) ,这两种方法预测的状态都有可能是准的,也都有可能是不准的。重点是我们怎么找到这两个准确率。
最简单的方法是两者相乘:

两块高斯分布相乘后,我们可以得到它们的重叠部分,这也是会出现最佳估计的区域。换个角度看,它看起来也符合高斯分布:
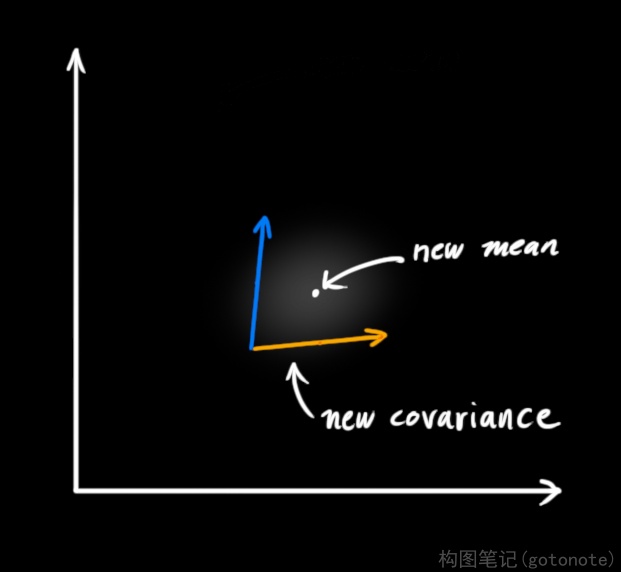
事实证明,当你把两个高斯分布和它们各自的均值和协方差矩阵相乘时,你会得到一个拥有独立均值和协方差矩阵的新高斯分布。最后剩下的问题就不难解决了:我们必须有一个公式来从旧的参数中获取这些新参数。
(五) 结合高斯
让我们从一维看起,设方差为 σ 2 {\sigma^2} σ2 ,均值为 μ \mu μ ,一个标准一维高斯钟形曲线方程如下所示:
N ( x , μ , σ ) = 1 σ 2 π e − ( x − μ ) 2 2 σ 2 \mathcal{N(x,\mu,\sigma)} = \frac{1}{\sigma\sqrt{2\pi}} {e^{-\frac{(x-\mu)^2}{2\sigma^2}}} N(x,μ,σ)=σ2π1e−2σ2(x−μ)2
那么两条高斯曲线相乘呢?

N ( x , μ 0 , σ 0 ) ⋅ N ( x , μ 1 , σ 1 ) = ? N ( x , μ ′ , σ ′ ) \mathcal{N(x,\color{Magenta}\mu_0,\sigma_0 \color{Block})} \cdot \mathcal{N(x,\color{YellowGreen}\mu_1,\sigma_1 \color{Block})} \overset{?}{=} \mathcal{N(x,\color{Blue}\mu^\prime,\sigma^\prime} \color{Block}) N(x,μ0,σ0)⋅N(x,μ1,σ1)=?N(x,μ′,σ′)
把这个式子按照一维方程进行扩展,可得:
μ ′ = μ 0 + σ 0 2 ( μ 1 − μ 0 ) σ 0 2 + σ 1 2 \color{Blue} \mu^\prime \color{Block} = \mu_0 + \frac{\sigma_0^2(\mu_1 - \mu_0)}{\sigma_0^2 + \sigma_1^2} μ′=μ0+σ02+σ12σ02(μ1−μ0)
σ ′ 2 = σ 0 2 − σ 0 4 σ 0 2 + σ 1 2 \color{Blue} {\sigma^\prime}^2 \color{Block} = {\sigma_0}^2 - \frac{\sigma_0^4}{\sigma_0^2 + \sigma_1^2} σ′2=σ02−σ02+σ12σ04
如果有些太复杂,我们用k简化一下:
k = σ 0 2 σ 0 2 + σ 1 2 \color{DarkRed}k \color{Block} = \frac{\sigma_0^2}{\sigma_0^2 + \sigma_1^2} k=σ02+σ12σ02
μ ′ = μ 0 + k ( μ 1 − μ 0 ) \color{Blue} \mu^\prime \color{Block} = \mu_0 + \color{DarkRed} k \color{Block}(\mu_1 - \mu_0) μ′=μ0+k(μ1−μ0)
σ ′ 2 = σ 0 2 − k σ 0 2 \color{Blue} {\sigma^\prime}^2 \color{Block} = {\sigma_0}^2 - \color{DarkRed} k \color{Block} {\sigma_0}^2 σ′2=σ02−kσ02
以上是一维的内容,如果是多维空间,把这个式子转成矩阵格式:
K = Σ 0 ( Σ 0 + Σ 1 ) − 1 \color{DarkRed}K \color{Block} = \Sigma_0(\Sigma_0 + \Sigma_1)^{-1} K=Σ0(Σ0+Σ1)−1
μ ′ = μ 0 ⃗ + K ( μ 1 ⃗ − μ 0 ⃗ ) \color{Blue}\mu^\prime \color{Block}= \vec{\mu_0} + \color{DarkRed}K \color{Block}(\vec{\mu_1} - \vec{\mu_0}) μ′=μ0+K(μ1−μ0)
Σ ′ = Σ 0 − K Σ 0 \Sigma^\prime = \Sigma_0 - \color{DarkRed}K \color{Block}\Sigma_0 Σ′=Σ0−KΣ0
这个矩阵 K K K 就是我们说的卡尔曼增益。
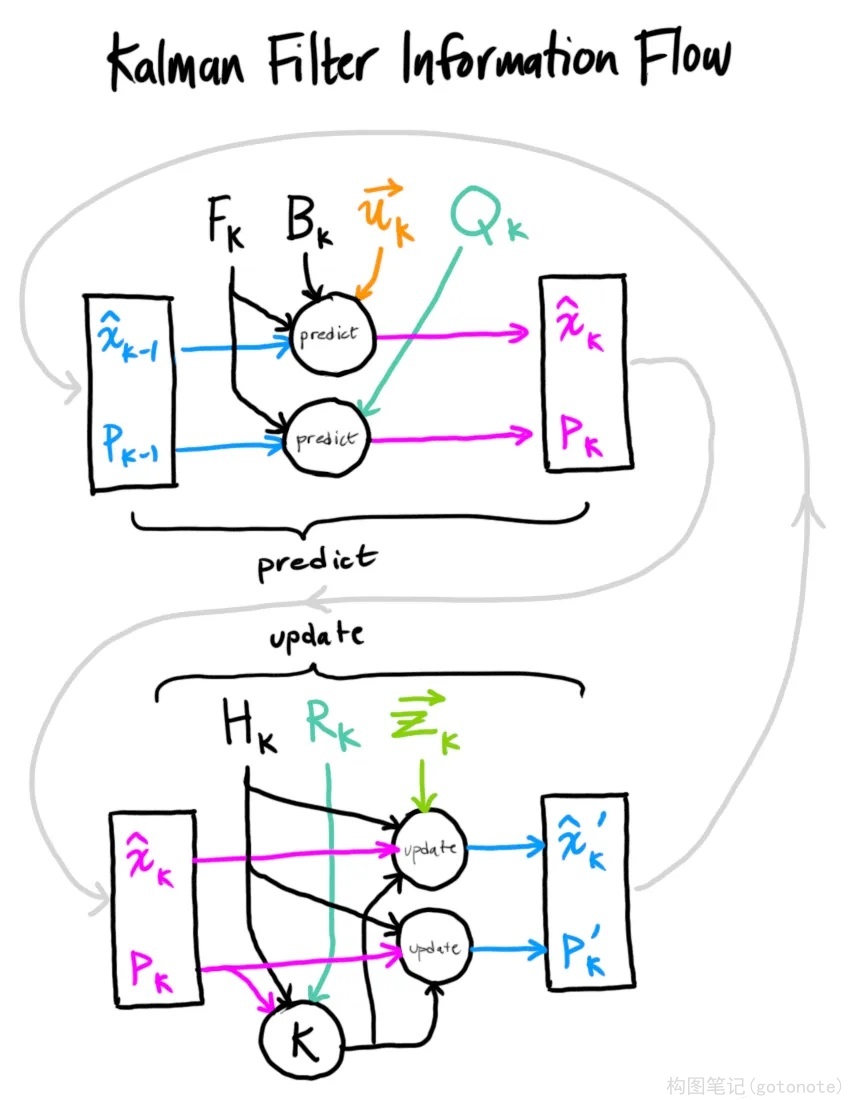
六、把它们结合在一起
截至目前,我们有用矩阵 ( μ 0 , Σ 0 ) = ( H k − x ^ k , H k P k H k T ) {(\mu_0, \Sigma_0) = (H_k - {\hat{x}_k}, H_kP_kH_k^T)} (μ0,Σ0)=(Hk−x^k,HkPkHkT) 预测的分布,有用传感器读数 ( μ 1 , Σ 1 ) = ( z ⃗ k , R k ) {(\mu_1, \Sigma_1) = (\vec{z}_k, R_k)} (μ1,Σ1)=(zk,Rk) 预测的分布。把它们代入上节的矩阵等式中:
H k x ^ k ′ = H k x ^ k + K ( z k ⃗ − H k x ^ k ) H_k\color{Blue}{\hat{x}_k^\prime} \color{Block}= H_k{\hat{x}_k} + \color{DarkRed}K (\color{YellowGreen}{\vec{z_k}} - \color{Magenta}H_k{\hat{x}_k}\color{Block}) Hkx^k′=Hkx^k+K(zk−Hkx^k)
H k P k ′ H k T = H k P k H k T − K H k P k H k T H_k\color{Blue}P_k^\prime \color{Block}H_k^T = \color{Magenta}H_kP_k{H_k^T} - \color{DarkRed}K\color{Magenta}H_kP_k{H_k^T} HkPk′HkT=HkPkHkT−KHkPkHkT
相应的,卡尔曼增益就是:
K = H k P k H k T ( H k P k H k T + R k ) − 1 \color{DarkRed}K=\color{Magenta}H_kP_k{H_k^T}(H_kP_k{H_k^T} + \color{SpringGreen}R_k\color{Block})^{-1} K=HkPkHkT(HkPkHkT+Rk)−1
考虑到 K K K 里还包含着一个 H k H_k Hk ,我们再精简一下上式:
x ^ k ′ = x ^ k + K ′ ( z k ⃗ − H k x ^ k ) \color{Blue}{\hat{x}_k^\prime} \color{Block}= \color{Magenta}{\hat{x}_k} \color{Block} + \color{DarkRed} K^\prime \color{Block}(\color{YellowGreen}{\vec{z_k}} \color{Block} - \color{Magenta}H_k{\hat{x}_k} \color{Block}) x^k′=x^k+K′(zk−Hkx^k)
P k ′ = P k − K ′ H k P k \color{Blue}P_k^\prime \color{Block}= \color{Magenta}P_k \color{Block}- \color{DarkRed}K^\prime\color{Magenta}{H_k}P_k Pk′=Pk−K′HkPk
K ′ = P k H k T ( H k P k H k T + R k ) − 1 \color{DarkRed}K^\prime \color{Block}= \color{Magenta}P_k{H_k^T}\color{Block}(\color{Magenta}H_kP_k{H_k^T} \color{Block}+ \color{SpringGreen}R_k) ^ {-1} K′=PkHkT(HkPkHkT+Rk)−1
最后,
x
^
k
′
{\hat{x}_k^\prime}
x^k′ 是我们的最佳估计值,我们可以把它继续放进去做另一轮预测:















 4923
4923











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









