







 本文介绍了超声波雷达在车载传感器中的应用,包括其工作原理、UPA和APA两种常见类型,详细阐述了参数指标如距离精度和探测范围,并探讨了其在自动泊车、紧急制动、防碰撞预警等自动驾驶系统中的关键作用。
本文介绍了超声波雷达在车载传感器中的应用,包括其工作原理、UPA和APA两种常见类型,详细阐述了参数指标如距离精度和探测范围,并探讨了其在自动泊车、紧急制动、防碰撞预警等自动驾驶系统中的关键作用。
超声波雷达
更多内容,请关注:
github:https://github.com/gotonote/Autopilot-Notes.git

超声波雷达,是一种利用超声波测算距离的雷达传感器装置。在车载传感器中,超声波雷达是目前最常见的品种之一,短距离测量中,超声波测距传感器具有非常大的优势,多用在倒车雷达上。在倒车入库,慢慢挪动车子的过程中,在驾驶室内能听到“滴滴滴”的声音,这些声音就是根据超声波雷达的检测距离给司机的反馈信息。
一、原理
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。常用探头的工作频率有 40kHz, 48kHz和58kHz三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故一般采用40kHz的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。探测范围在0.1-3米之间,而且精度较高,因此非常适合应用于泊车。
二、分类
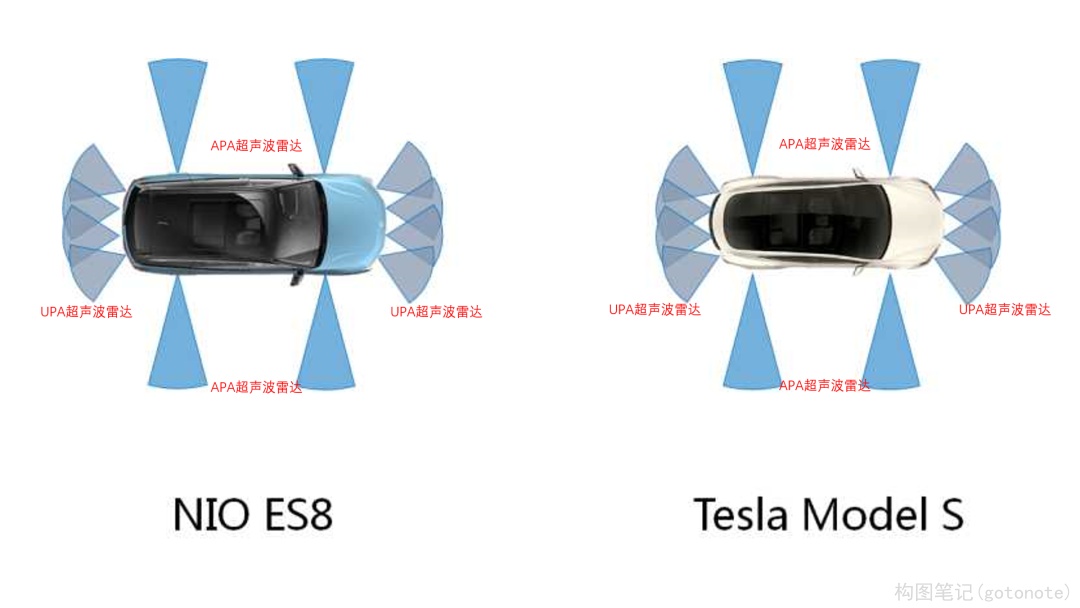
常见的超声波雷达有两种。第一种是安装在汽车前后保险杠上的,也就是用于测量汽车前后障碍物的倒车雷达,这种雷达业内称为UPA;第二种是安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,业内称为APA。
(一)UPA超声波雷达

UPA超声波雷达的探测距离一般在15~250cm之间,主要用于测量汽车前后方的障碍物。
(二)APA超声波雷达
APA超声波雷达的探测距离一般在30~500cm之间。APA的探测范围更远,因此相比于UPA成本更高,功率也更大。APA的探测距离优势让它不仅能够检测左右侧的障碍物,而且还能根据超声波雷达返回的数据判断停车库位是否存在。
三、 参数指标
(一)距离精度:
用于描述雷达对单个目标距离参数估计的准确度,它是由回波信号的信噪比 SNR 决定的。FMCW 雷达的有效噪声带宽与其调频时间成反比,调频时间越长,有效噪声带宽越低,分辨率越高。
(二)最大探测距离:
能够探测到障碍物的最大相对距离,一般为250m。最大可测速度与相邻 chirp 信号之间的空间间隔成反比。
(三)距离分辨率:
即多个目标被雷达区分出来的最小距离,主要由信号的带宽决定的,chirp 信号带宽的增加,距离分辨率随之提高。
(四)最大探测速度:
能够探测到障碍物的最大相对速度,一般为 240km/h。
(五)速度分辨率:
速度分辨率随着帧持续时间的增加而提高。
(六)探测视角:
能够探测到的视野范围,水平范围一般为±60°,垂直视角一般为±15°。
(七)角精度:
用于描述雷达对单个目标方位角估计的准确度。
(八)最大探测目标数:
最大能够探测的目标数量,一般为 24-32 个。
(九)角分辨率:
取决于雷达的工作波长和天线口径尺寸和 TX/RX 天线的数量。
四、应用
(一)自动泊车辅助系统
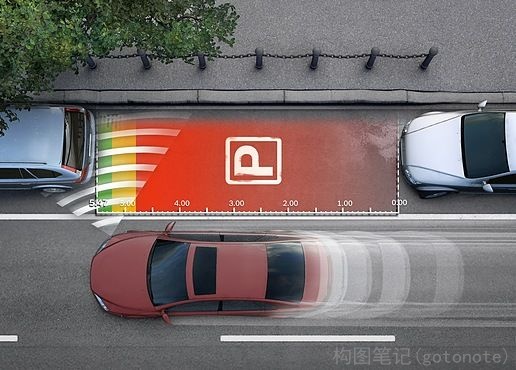
为了更好地达成辅助停车的功能,部分车型的自动泊车辅助系统甚至包含了8个PDC雷达(用于探测周围障碍物)和4个PLA雷达(用于测量停车位的长度)。这些超声波雷达系统可以实时监测车辆与障碍物之间的距离,并把信息反馈给车辆,以帮助车辆及时调整车身姿态和速度,顺利完成自动泊车。
(二)自动紧急制动系统

配备了自动紧急制动系统的车辆,会周期性地获取车辆当前的行驶速度,并根据当前速度、系统中预设的速度阈值以及超声波雷达的信息反馈,来判断车辆与障碍物之间的距离。一旦发现车辆距离前方行人或障碍物距离较近的时候,系统会主动提醒驾驶者,如果驾驶者还会做出反应,系统则会主动启动制动系统,确保安全距离。
(三)前方防碰撞预警系统

前方防碰撞预警系统的工作原理与自动紧急制动功能比较相似,通常会采用超声波雷达来实现车距的实时监测和识别,通过不断获取目标障碍物的距离信息,进行分析处理,传输给执行机构。一旦发现存在潜在碰撞危险,便会对驾驶者进行警告,但需要注意的是,预警系统本身不会采取任何制动措施去避免碰撞或控制车辆。
(四)变道辅助系统

变道辅助系统可以依靠布置在车身两侧的超声波雷达组件,探测障碍物或是运动车辆,再结合驾驶者的变道动作,来判断是否存在碰撞风险;再结合车辆本身的辅助驾驶功能,来完成车辆的变动操作。
(五)全速自适应续航系统

全速自适应续航系统一般集成了车辆摄像头、超声波雷达系统,通过ACC控制单元与ABS系统、发动机控制系统协调动作,适当加速或制动,使得车辆与前方车辆始终保持安全距离。

















 1559
1559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









