







文章目录
- 0. 参考文献
- 1. 四元数的定义和属性
- 2. 旋转和cross-relations
- 2.4 旋转群和四元数
- 3. Quaternion conventions. MY choice
- 4. Perturbations, derivatives and integrals
- 4.1 在SO3上的加法减法
- 4.2 the four possible derivative definitions
- 4.2.1 从向量空间到向量空间
- 4.2.2 从SO3到SO3
- 4.2.3 从向量空间到SO3
- 4.2.4 从SO3到向量空间
- 5. Error-state Kinematics for IMU-driven system
- 6. 融合其他的传感器信息
0. 参考文献
【1】Quaternion kinematics for the error-state Kalman filter
四元数基础参考之前的一片博文
1. 四元数的定义和属性
1.1 四元数的定义
1.1.1 四元数的表示方式
1.2 四元数的性质
1.2.1 加和
1.2.2 积
1.2.3 单位1
1.2.4 共轭
1.2.5 长度
1.2.6 逆
1.2.7 单位四元数
1.3 额外的性质
1.3.1 quaternion commutator
1.3.2 纯四元数的乘积
1.3.3 纯四元数的幂
1.3.4 纯四元数的指数
1.3.5 一般四元数的指数
1.3.6 单位四元数的对数
1.3.7 一般四元数的对数
1.3.8 四元数的幂的指数形式
2. 旋转和cross-relations
2.1 3维向量的旋转
如下图的旋转:

可以将x分解:
分解后各个成分的计算方法:
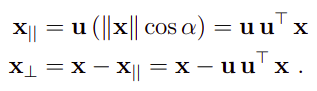
在旋转的过程中,和轴平行的部分不发生变化:
在垂直于旋转轴的平面上选择两个基向量:
在该平面内旋转
ϕ
\phi
ϕ角度后,有:

可以写做:

再加上平行的部分,可以得到旋转后的整体向量:

注意这里要区别上一篇博文中的一个公式:

仔细观察和计算可以发现两个式子其实是一样的,只不过表达的符号并不相同。
2.2 旋转群SO3
旋转变换会保持向量长度:

旋转变换会保持两线夹角:

旋转变换会保持向量间方向关系:

这一章就是要说明旋转群和四元数之间的关系?
首先有如下一个表:


2.3 旋转群和旋转矩阵
将旋转变换写成一个矩阵形式:
旋转矩阵不改变向量长度,说明R是正交的:

进一步将正交性质写成 :
同时说明:
由于上面说过,R有保持向量方向的特性,因此有如下的关系,这个用来排除了反射这一类特殊矩阵:
2.3.1 指数映射
这里引出了李代数
2.3.2 大写的指数映射

这里是换一种表达方式

2.3.3 旋转矩阵和旋转向量:罗德里格斯公式
2.3.4 对数映射
又映射回去
2.3.5 旋转变换

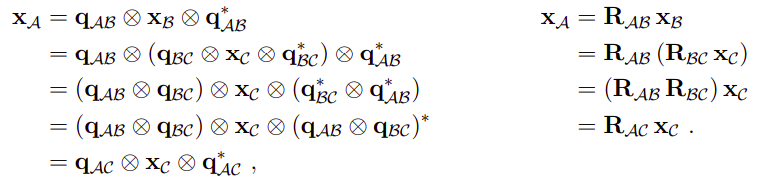
2.4 旋转群和四元数
先做一个假设(后面会证明,其实上一篇博文对应的文献也有证明)

由于旋转保持了向量v的长度,并且根据四元数的性质,有:

为了满足上式成立,需要q的模等于1:
可以看到,这个条件,和前面在描述旋转矩阵时的条件,类似,就是下面这个:

下面证明四元数旋转能保持向量x乘方向,证明过程运用了两次1.3.1里面的性质

2.4.1
2.4.2 大写的指数映射
2.4.3 四元数和旋转向量

2.4.4 对数映射
2.4.5 旋转变换

2.4.6 The double cover of the manifold of SO3
2.5 旋转矩阵和四元数

2.6 组合多个旋转
2.7 球面线性插值(SLERP)
2.8 quaternion and isoclinic rotations:explaining the magic
3. Quaternion conventions. MY choice
4. Perturbations, derivatives and integrals
4.1 在SO3上的加法减法
4.2 the four possible derivative definitions
4.2.1 从向量空间到向量空间
这个是在向量空间上的求导数定义

一阶泰勒展开(或者看成欧拉积分):

4.2.2 从SO3到SO3

4.2.3 从向量空间到SO3

4.2.4 从SO3到向量空间

4.3 有用的旋转雅阁比
考虑要对一个向量 a \pmb{a} aaa进行旋转,旋转轴为 u \pmb{u} uuu,旋转角度 θ \theta θ,考虑三种不同形式的表达: θ = θ u \pmb{\theta}=\theta \pmb{u} θθθ=θuuu, q = q { θ } \pmb{q=q\{\theta\}} q=q{θ}q=q{θ}q=q{θ}, R = R { θ } \pmb{R=R\{\theta\}} R=R{θ}R=R{θ}R=R{θ}。我们关心的是旋转结果对于不同旋转度量的雅阁比
4.3.1 对于向量(vector)的雅阁比

4.3.2 对于四元数的雅阁比


4.3.3 SO3空间的右乘雅阁比
4.3.4 对于旋转向量的雅阁比
注意这一节和《slam十四讲》的内容进行对应,注意区别和联系

上面这一段和《十四讲》中下面这一段是一样的:

4.4 扰动,不确定性和噪声
4.4.1 local perturbations
在原先的四元数q上加一个微小的扰动量:

下面这一大段其实每太看懂,其中提到的泰勒展开,和《十四讲》里的扰动模型推导过程应该也有些关系

4.4.2 Global perturbations
完全看不懂要干啥
4.6 Time-integration of rotation rates
4.6.1 零阶积分
4.6.2 一阶积分
5. Error-state Kinematics for IMU-driven system
5.1 motivation
5.2 eskf 解释
我们考虑error因为它小,可以很容易线性化。那些较大的值就直接积分好了。
那些高频的IMU数据,被积分成状态,这些状态没考虑误差和模型的不确定性,因此,有较大的积累误差。这些误差会通过动态方程进行估计,然后去修正积分值。
5.3 连续时间的系统运动学
所有的定义变量:


注意:
(1)IMU直接读的角速度是local坐标系下的
(2)角度偏差也是local的
5.3.1 真实状态运动学
这里面包含了输入随机误差
真实状态运动学方程为:

5.3.2 名义状态运动学
这里面没有包含随机误差和扰动:

5.3.3 误差状态运动学
误差的状态变化方式

先看式(238a,238d,238e,238f),以(238a)为例展示推导过程:
根据上面的表,已知
p
t
=
p
+
δ
p
p_t=p+\delta p
pt=p+δp,两边求导得
p
˙
t
=
p
˙
+
δ
p
˙
\dot{p}_t=\dot{p}+\dot{\delta p}
p˙t=p˙+δp˙,查上表,代入几个p的表达式,就可以得到
δ
p
˙
\dot{\delta p}
δp˙的表达式。
再看式(238b)线速度误差。我们要确定线速度误差的变化率
δ
v
˙
\dot{\delta v}
δv˙,从下面的关系开始:


然后开始处理
δ
v
˙
t
\dot{\delta v}_t
δv˙t:

第一行式子展开了右侧,第二行把左侧展开了,左右对消,可以得到

删除高阶项:

将前面的式子带进来:

注意这里面的
a
n
a_n
an项,这个是噪声,线加速度噪声和旋转无关,因此:

再看方向偏差变化率,我们要确定的是
δ
θ
˙
\dot{\delta \theta}
δθ˙,从下面的关系开始:

上面的分别真实状态,和名义状态。和线加速度一样,写成大信号和小信号的形式:

两个合起来就是:

进一步处理真实四元数的导数

移项并化简:

得到两个方程:

第一个不是很有用,主要看第二个,忽略高阶项后:

进一步化简:

5.4 离散时间的系统运动学
要将上面的微分方程离散化,有的可以直接离散,有的可能要用到数值积分方法。仅针对名义状态和误差状态进行离散化:
5.4.1 名义状态运动学
得到的离散运动方程如下,也可以用其他的积分方法?

5.4.2 误差状态运动学
需要回忆一下卡尔曼滤波

5.4.3 误差状态雅阁比和扰动
6. 融合其他的传感器信息
用IMU信息来预测,用其他的信息来矫正filter,进而观测到IMU的偏置误差,矫正过程如下:
- 通过滤波器矫正来观测到error-state
- 将观测到的error注入到名义状态
- 重置error-state
6.1 通过滤波器矫正来观测到error-state
假设有一个观测模型:

其中h是关于真实状态的非线性函数,v是一个高斯噪声

6.1.1 滤波器矫正的雅阁比计算
6.2 观测误差注入名义状态
















 925
925











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









