










创建虚拟环境环境:gxf(虚拟环境名)
工具
1.安装git
终端输入:
sudo apt-get install git
2.安装VI
sudo apt-get remove vim-common
sudo apt-get install vim
3.安装G++
sudo apt install g++
4.安装CMake-3.18.4
sudo apt install build-essential libssl-dev
wget https://github.com/Kitware/CMake/releases/download/v3.18.4/cmake-3.18.4.tar.gz
tar -zxvf cmake-3.18.4.tar.gz
cd cmake-3.18.4
./bootstrap
make
sudo make install
# 查看版本
cmake -version
源码下载
下载0.4beta版本的
首先建立项目文件(ORB3的文件我都放这了)
mkdir orb_slam3
cd orb_slam3
将文件解压后放入orb_slam3文件夹下
安装依赖库
1.Eigen3.3.4安装
#github 有个mirror,版本3.3.4 from 2017,手动安装
//git clone https://gitcode.net/mirrors/Oneflow-Inc/eigen-git-mirror.git
//#安装
//cd eigen-git-mirror
//mkdir build
//cd build
//cmake ..
//sudo make install
//自动安装3.3.7版本,不影响
sudo apt-get install libeigen3-dev
#安装后,头文件安装在/usr/include/eigen3/
2.Pangolin安装
安装Pangolin所需依赖
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
#下载版本为0.6,其他版本会出错
git clone https://github.com/stevenlovegrove/Pangolin/tree/v0.6.git
cd pangolin-v0.6
mkdir build && cd build
cmake ..
make -j4
sudo make install
如果下载不下来,本地下载安装
官网下载
下载解压后
cd Pangolin
mkdir build && cd build
cmake ..
make -j4
sudo make install
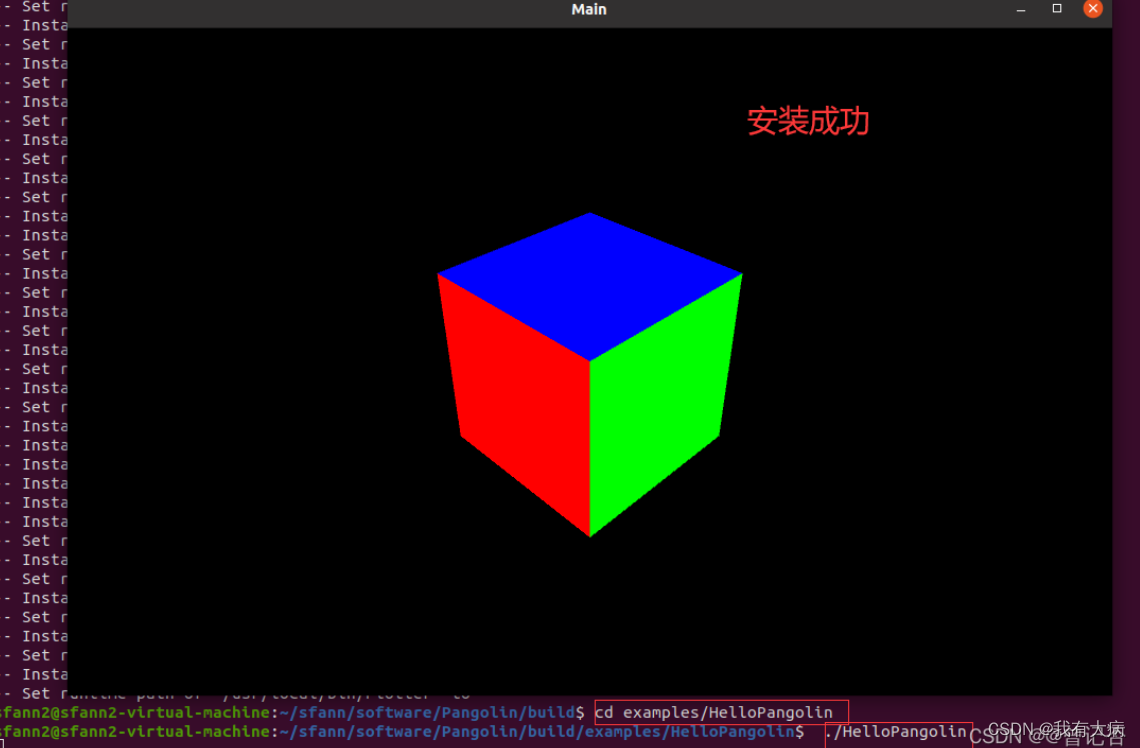
检查是否安装成功:
cd examples/HelloPangolin
./HelloPangolin
3.OpenCV3.4.5安装(3.0以上就行)
opencv依赖:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff4.dev libswscale-dev libjasper-dev
下载opencv
官网下载
然后进入解压后的文件夹,在终端打开
# 配置并编译
mkdir build&& cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
安装完毕,配置环境
#添加库路径
sudo /bin/bash -c 'echo "/usr/local/lib" > /etc/ld.so.conf.d/opencv.conf'
#更新系统库
sudo ldconfig
#配置bash
sudo gedit /etc/bash.bashrc
# 1. 在末尾粘贴如下两行代码
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
# 2. 保存,执行如下命令使得配置生效:
source /etc/bash.bashrc
#更新
apt-get install mlocate
sudo updatedb
#opencv版本检测
pkg-config --modversion opencv
4.安装Python & libssl-dev
sudo apt install libpython2.7-dev
sudo apt-get install libssl-dev
5.安装boost库
官网下载1.75.0.tar.gz版本
下载
解压后终端输入
sudo ./bootstrap.sh
sudo ./b2 install
编译ORB SLAM3
cd orb_slam3-v0.4-beta
chmod +x build.sh
./build.sh
要等一会
数据集测试
官网下载
下载ASL格式;
路径:orb_slam3-v0.4-beta/dataset/MH_##/mav0(举例:在orb_slam3-v0.4-beta下建立dataset文件夹,MH01解压后文件名为mav0,在dataset文件夹中新建MH01文件夹,将mav0放入,不要直接修改文件名!!!)
双击打开ORB-SLAM3源码中的脚本“euroc_examples.sh“(在orb_slam3-v0.4-beta/Examples中),找到包含MH01的指令,如下:
#数据集的路径,要自己改
pathDatasetEuroc='/Datasets/EuRoC' #我的数据在pathDatasetEuroc='/home/robot/orb_slam3/orb_slam3-v0.4-beta/dataset'
# 在orb_slam3-v0.4-beta/Examples下打开终端输入:
echo "Launching MH01 with Monocular sensor"
./Monocular/mono_euroc ../Vocabulary/ORBvoc.txt ./Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
注:出现如下错误说明数据集地址放错了,程序没有找到(检查下数据集路径一致不)或者数据集不全(重新下再全的数据集),我就是开始把数据集放错位置了。

除了这点失误,其他没有别的错误,完美安装















 8529
8529











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









