






 本文探讨了RRT与Dubins结合以及混合A*与Dubins结合在智能小车路径规划中的应用,强调了在不同场景下的优势和选择策略。
本文探讨了RRT与Dubins结合以及混合A*与Dubins结合在智能小车路径规划中的应用,强调了在不同场景下的优势和选择策略。
智能小车路径规划
算法:RRT与Dubins相结合的方法,混合A*与Dubins相结合的方法
实现智能小车最短路径规划。
ID:86200712053218228
灵犀Mr_p
智能小车路径规划一直是无人驾驶技术中的关键问题之一。在实现智能小车的最短路径规划过程中,算法的选择至关重要。本文将深入探讨两种常用的路径规划算法:RRT与Dubins相结合的方法,以及混合A*与Dubins相结合的方法。
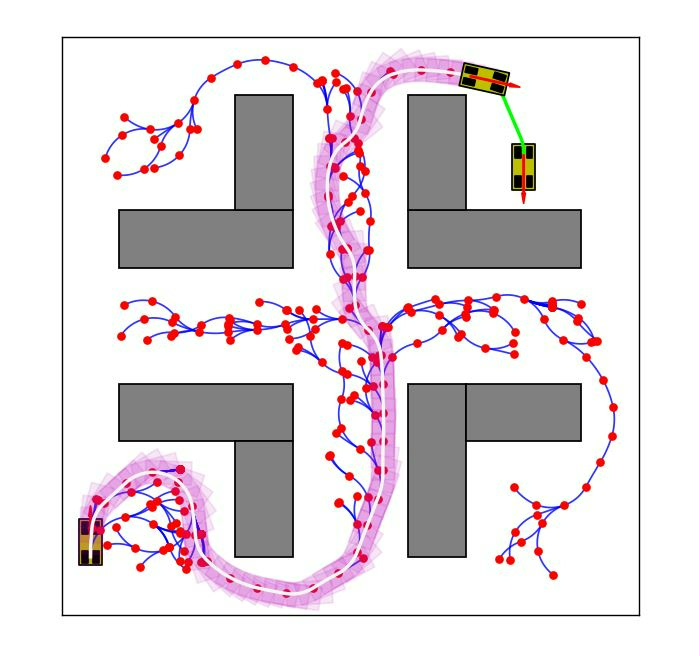
首先,我们介绍RRT(Rapidly-exploring Random Tree)算法。RRT是一种基于随机采样的搜索算法,它通过随机生成一系列节点,并以当前节点为起点,通过不断添加新节点的方式,在搜索空间中建立一棵树。RRT算法的优势在于其快速的收敛性和较低的计算复杂度,适用于高维度的路径规划问题。
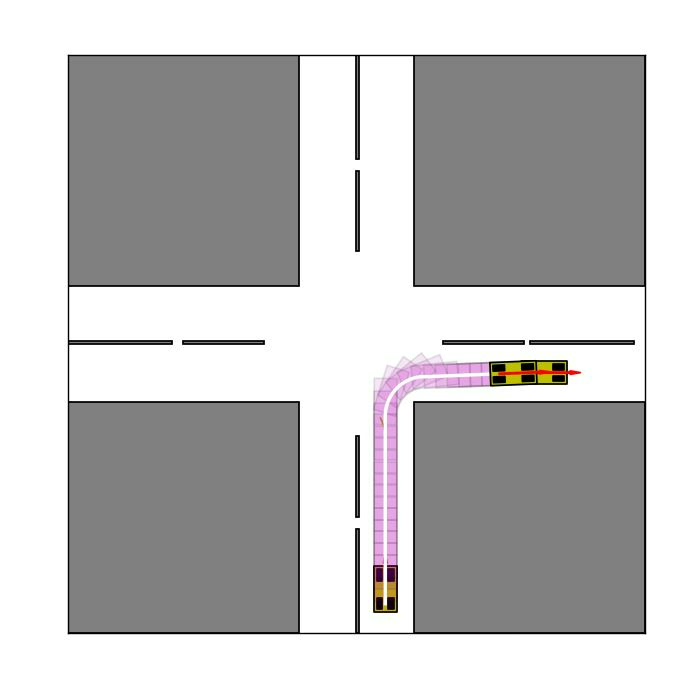
然而,RRT算法在某些场景下可能存在局限性。例如,在存在转弯半径限制的情况下,RRT算法无法快速生成可行路径。为了克服这一问题,我们可以将RRT算法与Dubins曲线相结合。Dubins曲线是一种具有最小转弯半径约束的光滑路径,可以有效地避开障碍物。通过在RRT算法中引入Dubins曲线,我们可以在保证路径可行性的同时,实现更加高效的路径规划。
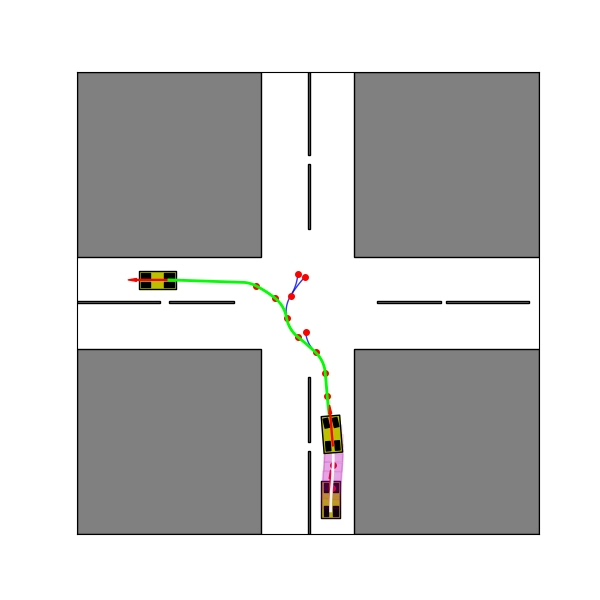
除了RRT与Dubins相结合的方法,我们还可以考虑混合A与Dubins相结合的方法。A算法是一种常用的启发式搜索算法,通过估计从起点到目标点的代价函数,寻找最短路径。然而,A算法在处理存在转弯半径限制的情况下可能存在困难。因此,我们可以将A算法与Dubins相结合,利用Dubins曲线生成可行路径,并通过A*算法进行路径搜索。这种混合方法既考虑到了路径的可行性,又能够在复杂环境中快速搜索最短路径。
在实现智能小车最短路径规划时,我们可以根据具体的应用场景选择合适的算法。如果场景复杂且存在转弯半径限制,可以考虑使用RRT与Dubins相结合的方法。而如果场景相对简单,但需要快速搜索最短路径,可以选择混合A*与Dubins相结合的方法。
综上所述,智能小车路径规划算法的选择对于实现最短路径具有重要意义。RRT与Dubins相结合的方法和混合A*与Dubins相结合的方法是两种常用的路径规划算法。通过灵活运用这些算法,我们可以实现智能小车的最短路径规划,为无人驾驶技术的发展做出贡献。
以上相关代码,程序地址:http://wekup.cn/712053218228.html















 657
657











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









