







在人工智能领域,每一次技术突破都让人感到振奋。而清华大学TSAIL团队推出的RDT-1B机器人扩散模型,无疑是一个里程碑式的成果。这款基于扩散Transformer的模型,不仅展示了对多模态学习的深刻理解,更体现了对多机器人协作复杂性的掌握。
作为一个技术爱好者和实践者,我对RDT-1B感到由衷的兴奋,它的潜力将为机器人技术的未来铺平道路。
什么是RDT-1B?
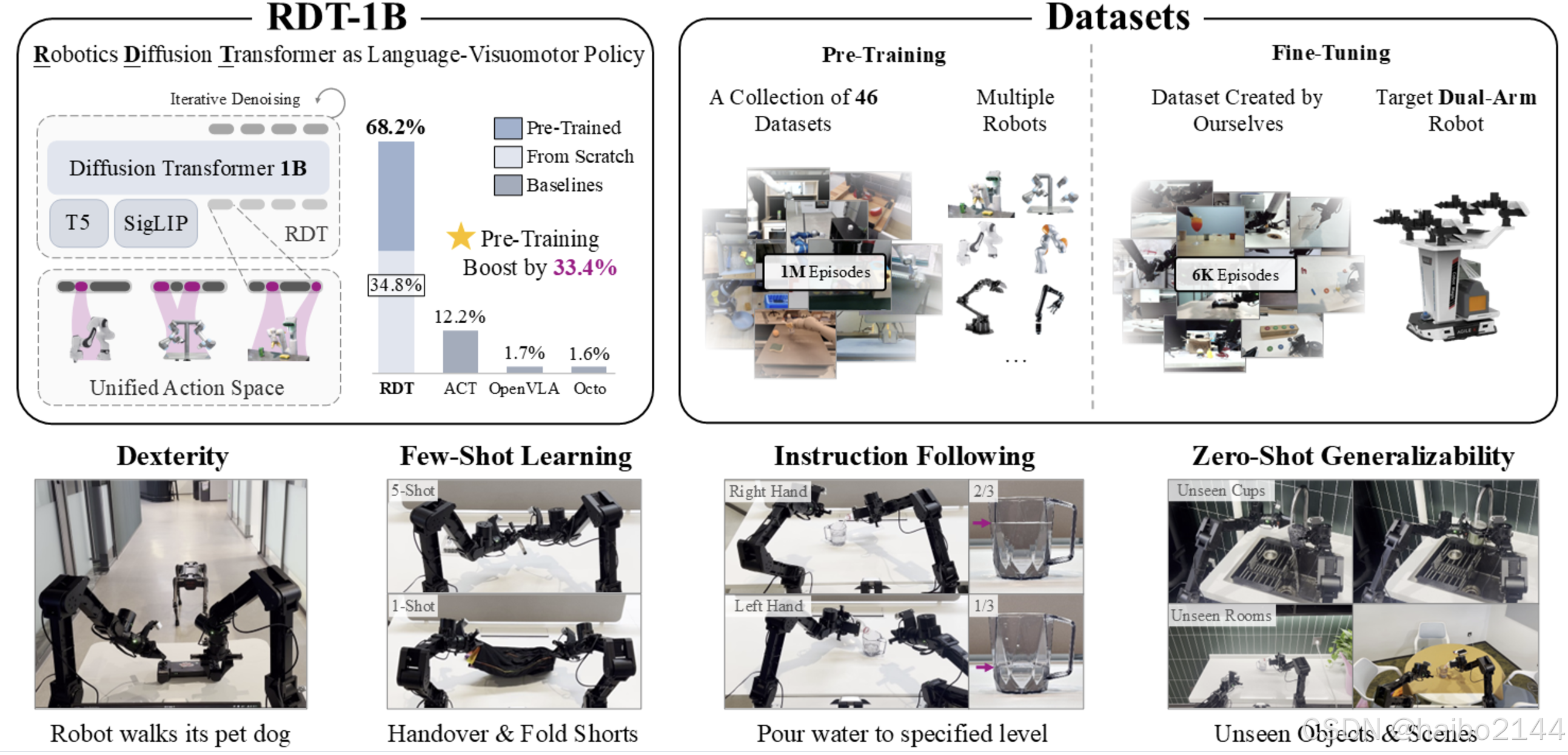
RDT-1B是一种拥有10亿参数的模拟学习扩散Transformer模型。其特点是:
多模态输入支持:结合语言指令和最多三个视角的RGB图像输入,能够进行精确决策。
统一的动作空间:支持从单臂到双臂,从关节动作到末端执行器操作,甚至包含轮式运动的机器人控制。
预测能力强大:能够推断接下来64个机器人动作,使其在动态环境中的反应更加智能化。
通过对超过100万次多机器人剧集的预训练,RDT-1B在理解和预测复杂的机器人动作方面展示了极高的能力,同时其代码、模型权重和数据集均以MIT开源许可发布,推动了研究社区的共享与发展。
RDT-1B的应用场景
这款模型的实际应用潜力极其广泛:
-
工业自动化
RDT-1B对多样化机械手和移动机器人平台的兼容性,使其能够应用于流水线生产、仓储物流和精密装配等场景。例如,它可以根据自然语言指令和环境图像,完成动态搬运任务。 -
服务机器人
服务型机器人需要处理复杂的非结构化环境。通过RDT-1B的多模态输入,家庭助理机器人可以更智能地完成诸如
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1426
1426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









