







 超级会员免费看
超级会员免费看
 本文详细介绍了如何在海康VisionMaster算法平台与西门子PLC1200之间建立S7通信。首先设置PLC的以太网地址和连接机制,然后在VisionMaster中配置西门子S7协议,并指定PLC的IP、端口、机架号和槽号。通过数据同步和发送数据进行通讯调试,成功实现了数据的双向传输。
本文详细介绍了如何在海康VisionMaster算法平台与西门子PLC1200之间建立S7通信。首先设置PLC的以太网地址和连接机制,然后在VisionMaster中配置西门子S7协议,并指定PLC的IP、端口、机架号和槽号。通过数据同步和发送数据进行通讯调试,成功实现了数据的双向传输。
通信是连通算法平台和外部设备的重要渠道,在海康VisionMaster算法平台中既支持外部数据的读入也支持数据的写出,当通信构建起来以后既可以把软件处理结果发送给外界,又可以通过外界发送字符来触发相机拍照或者软件运行。
本文以西门子PLC1200作为外部设备为例,讲解海康VisionMaster与西门子PLC1200进行S7通信。
一、西门子PLC1200通讯设置
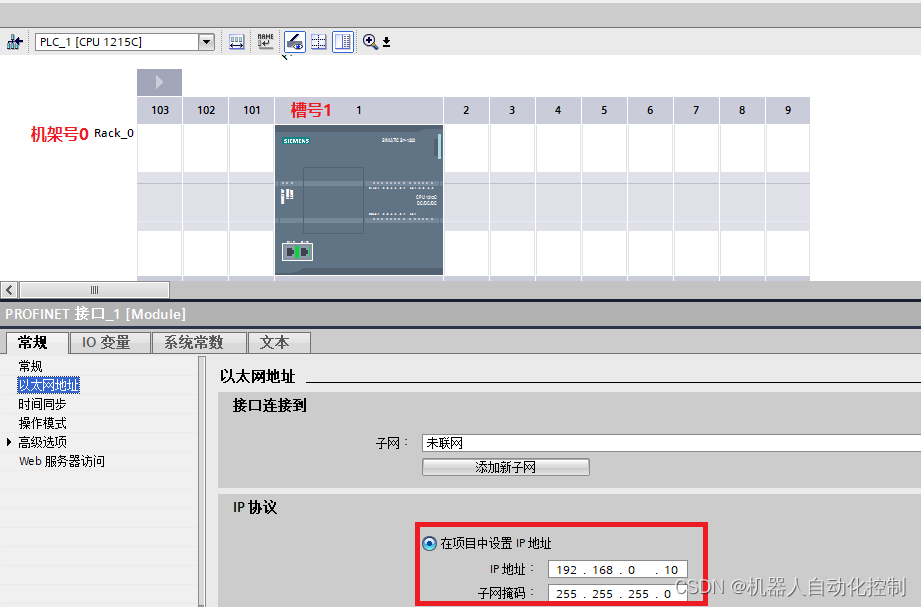
设置PLC的以太网地址。同时注意PLC的机架号和槽号,在后续的visionmaster设置中会使用。
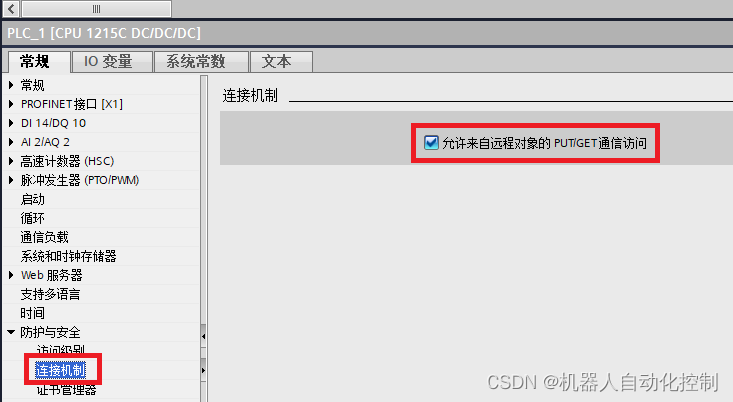
设置PLC的连接机制,勾选“允许来自远程对象的PUT/GET通信访问”。
创建一个DB块,存储用于通讯的变量。我们创建了4个双整形变量DInt, 32 bit.

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2850
2850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











