







实际的控制中,传感器的数据总是带有噪声,直接使用容易导致控制器的震荡。
因此,对传感器数据进行滤波是需要特别考虑的。
由于控制器通常由计算机运算,因此无论是传感信号还是控制信号都是数字信号,所以需要设计数字滤波器。
FIR和IIR是两种常用的数字滤波器实现方法,这篇博客将会介绍如何设计一个经典的IIR数字滤波器。
1 IIR滤波器
IIR滤波器的形式为(离散域形式):
H
(
z
)
=
Y
(
z
)
X
(
z
)
=
∑
p
=
0
M
a
p
z
−
p
∑
p
=
0
N
b
p
z
−
p
H(z)=\frac{Y(z)}{X(z)}=\frac{\sum_{p=0}^{M}a_pz^{-p}}{\sum_{p=0}^{N}b_pz^{-p}}
H(z)=X(z)Y(z)=∑p=0Nbpz−p∑p=0Mapz−p
通常,
b
0
=
1
b_0=1
b0=1。
x
x
x代表输入,
y
y
y代表输出。
改写成差分方程形式就是:
y
(
k
)
+
b
1
y
(
k
−
1
)
+
b
2
y
(
k
−
2
)
+
.
.
.
=
a
0
x
(
k
)
+
a
1
x
(
k
−
1
)
+
a
2
x
(
k
−
2
)
+
.
.
.
y(k)+b_1y(k-1)+b_2y(k-2)+...=a_0x(k)+a_1x(k-1)+a_2x(k-2)+...
y(k)+b1y(k−1)+b2y(k−2)+...=a0x(k)+a1x(k−1)+a2x(k−2)+...
即:
y
(
k
)
=
−
∑
p
=
1
N
b
p
y
(
k
−
p
)
+
∑
p
=
0
M
a
p
x
(
k
−
p
)
y(k)=-\sum_{p=1}^{N}b_py(k-p)+\sum_{p=0}^{M}a_px(k-p)
y(k)=−p=1∑Nbpy(k−p)+p=0∑Mapx(k−p)
这里可以看到,IIR滤波器是既和输入有关,也和输出有关的,也就是说这个滤波器是具有反馈的。
与之相对应的FIR滤波器的形式如下:
H
(
z
)
=
Y
(
z
)
X
(
z
)
=
∑
n
=
0
N
−
1
h
(
n
)
z
−
n
H(z)=\frac{Y(z)}{X(z)}=\sum_{n=0}^{N-1}h(n)z^{-n}
H(z)=X(z)Y(z)=n=0∑N−1h(n)z−n
即:
y
(
k
)
=
∑
n
=
0
N
−
1
h
(
n
)
x
(
k
−
n
)
y(k)=\sum_{n=0}^{N-1}h(n)x(k-n)
y(k)=n=0∑N−1h(n)x(k−n)
即FIR是单纯和输入有关的,没有反馈。
2 滤波器设计
实际上,数字滤波器的结构非常简单,代码实现上也非常容易。
数字滤波器的核心在于如何确定滤波器中的各项系数,这是滤波器设计的重中之中。我们学习的庞大复杂的数字滤波器的相关理论也是为其服务的。
所幸,如今要设计滤波器,使用MATLAB就可以了,不需要自己去进行复杂的计算。
一般来说,IIR滤波器的设计可以分为四个步骤:
- 选择一种模拟滤波器(这里通常可以是巴特沃斯、切比雪夫滤波器等)
- 确定数字滤波器的截止频率(数字滤波器和模拟滤波器截止频率存在对应关系)
- 计算模拟滤波器截止频率,并计算模拟滤波器中各个参数的值
- 利用双线性变换,将模拟滤波器中的s用z代替,得到最终的数字滤波器
如今,我们拥有了MATLAB的工具,设计一个IIR滤波器只需要一句代码就可以了。
选取一阶低通巴特沃斯滤波器为例,其IIR数字滤波器的系数可由下面的语句计算:
[a,b]=butter(1, 0.1,'low');
% 其中:
% butter代表巴特沃斯滤波器
% 1代表1阶
% 0.1代表数字滤波器的截止频率占采样频率的比值,例如传感器采样频率是100hz,期望截止频率是10hz,那么这个比值就是:10hz/100hz=0.1
% 'low'代表低通滤波器
% a和b代表滤波器系数
当然,想要选择哪种模拟滤波器进行IIR的实现,大家可以自由选择,MATLAB中都有对应工具。
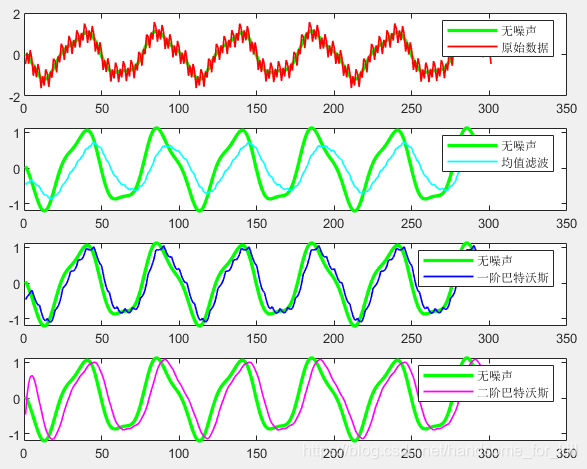
3 MATLAB示例
为了更好的说明,如何利用MATLAB实现数字滤波,我写了一个程序:
clc;
clear all;
close all;
% 生成有噪声数据
dt = 0.01; % 采样频率: 100hz
f1 = 2; % 频率成分1
f2 = 5; % 频率成分2
f3 = 20; % 频率成分3
f4 = 40; % 频率成分4
X = [];
G = [];
for t = 0:dt:3
g = -sin(f1*2*pi*t+0.1) + 0.2*sin(f2*2*pi*t+0.8);
x = g - 0.3*sin(f3*2*pi*t+0.8) + 0.4*sin(f4*2*pi*t-0.8);
G = [G;g];
X = [X;x];
end
% 展示结果
% 原始数据
subplot(4,1,1)
plot(G, 'g-', 'LineWidth', 2)
hold on
plot(X,'r-', 'LineWidth', 1)
hold on
legend('无噪声', '原始数据')
% 低通滤波
sX0 = X;
alpha = 0.1;
for ii=2:length(X)
sX0(ii) = (1-alpha)*sX0(ii-1) + alpha*X(ii);
end
subplot(4,1,2)
plot(G, 'g-', 'LineWidth', 2)
hold on
plot(sX0,'c-', 'LineWidth', 1)
hold on
legend('无噪声', '一阶低通滤波')
% IIR
% b0*Y(k)-b1*Y(k-1)-b2*Y(k-2)-...=a0*X(k)+a1*X(k-1)+a2*X(k-2)+...
% Y(k)=(b1*Y(k-1)+b2*Y(k-2)+...+a0*X(k)+a1*X(k-1)+a2*X(k-2)+...)/b0
% 一阶巴特沃斯滤波器
[a,b]=butter(1,0.1,'low'); % 10hz/100hz=0.1
sX1 = butterworth_filter(X, a, b, 1);
subplot(4,1,3)
plot(G, 'g-', 'LineWidth', 2)
hold on
plot(sX1,'b-', 'LineWidth', 1)
hold on
legend('无噪声', '一阶巴特沃斯')
% 二阶巴特沃斯滤波器
[a,b]=butter(2,0.1,'low'); % 10hz/100hz=0.1
sX2 = butterworth_filter(X, a, b, 2);
subplot(4,1,4)
plot(G, 'g-', 'LineWidth', 2)
hold on
plot(sX2,'m-', 'LineWidth', 1)
hold on
legend('无噪声', '二阶巴特沃斯')
function smooth_data = butterworth_filter(data, a, b, order)
smooth_data = data;
for ii = order+1:length(data)
parta = 0;
for jj = 1:order+1
parta = parta + a(jj)*data(ii-jj+1);
end
partb = 0;
for kk = 2:order+1
partb = partb - b(kk)*smooth_data(ii-kk+1);
end
smooth_data(ii) = parta + partb;
end
end
运行结果如下:















 288
288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









