






 瑞士洛桑联邦理工大学的科学家开发了机器人Pleurobot,它能精确模拟蝾螈的行走和游泳。通过神经网络控制系统,该机器人有助于研究脊椎动物运动的演化,理解脊髓对运动的控制,潜在应用包括康复治疗和假肢研发。设计过程中,科学家使用了3D打印、高速射线运动摄制等技术,确保了机器人的生物力学特性。
瑞士洛桑联邦理工大学的科学家开发了机器人Pleurobot,它能精确模拟蝾螈的行走和游泳。通过神经网络控制系统,该机器人有助于研究脊椎动物运动的演化,理解脊髓对运动的控制,潜在应用包括康复治疗和假肢研发。设计过程中,科学家使用了3D打印、高速射线运动摄制等技术,确保了机器人的生物力学特性。
原文:Robot mimics vertebrate motion
翻译:赵屹华
责编:周建丁(zhoujd@csdn.net)

瑞士洛桑联邦理工大学(EPFL)的科学家最近新研制出了一款机器人“Pleurobot”,这款机器人能够精细地模拟蝾螈的行走和游泳行为。
除了概念炫酷之外(今后还可能成为迪士尼的卖点之一),研究人员相信,机器人的设计方案将提供一种新的工具,有助于了解脊椎动物的运动的演化。这能使我们更好地理解脊髓是如何控制身体的运动,它将有助于瘫痪和截肢病人的康复治疗和假肢研发。
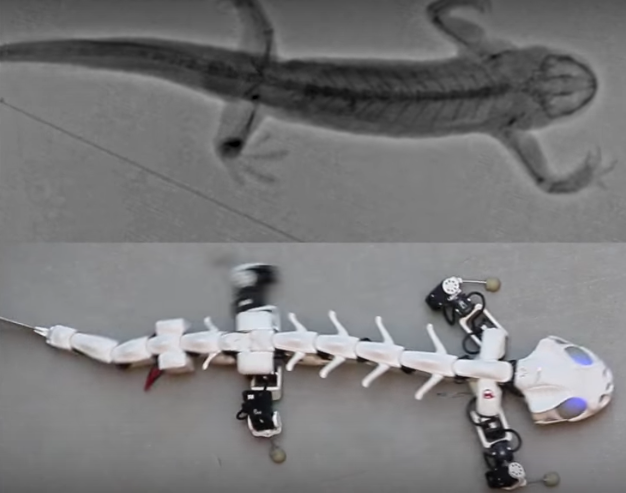
3D模拟蝾螈的运动需要满足特别高的精度要求。生物机器人实验室的科学家起初从顶部和侧面拍摄有肋螈这种蝾螈的精细射线视频,当蝾螈在水中或是陆地上运动时跟踪其骨架上的64个关键点。
接着,Auke Ijspeert与他的团队制作了3D打印的骨骼和活动关节,并且用电子电路开发了一套“神经系统”,使得Pleurobot能够行走、爬行,乃至在水中游泳。
Ijspeert认为Pleurobot的设计方式将有助于开发其它类型的“生物机器人”,这将成为神经科学和生物力学领域的重要工具。
发表在皇家学会杂志《Interface》上的这项研究已经获得了来自瑞士国家机器人研究中心(NCCR)和瑞士国家自然科学基金的科研经费。
视频参考:https://youtu.be/jMWMJ1wv9w4(科学上网)
论文摘要
机器人作为一种技术工具,越来越多地应用于动物运动的研究中。然而,因为动物骨骼肌肉系统的复杂性和当前机器人技术的限制,设计一个能够恰当模拟动物运动和动态特性的机器人则是困难重重。我们结合了高速射线运动摄制、系统优化、动态扩展、三维打印和高端伺服电机等技术提出了一种构造机器人Pleurobot的设计方案:一种高度模仿蝾螈生物特性的机器人——Pleurodeles waltl。我们在之前的机器人上进行测试,验证了通过肢体和脊椎的运动神经网络来触发基本游泳和行走运动的假设。我们基于Pleurobot所演示的设计方案有助于研究更丰富的蝾螈运动技能。我们特别关注的是如何用更多的下级通道和更详细的肢体中枢模式发生器网络来拓展我们的脊髓模型,从而掌握更多的运动技能。Pleurobot是一款动态缩放两栖蝾螈机器人,自由度多达27个。基于我们的设计方案,这款机器人可以实现动物的绝大多数自由度和活动范围,尤其是四肢的活动。我们从X射线视频中提取的原始运动数据,控制机器人的关节在水中和陆地上的基本运动。机器人的相对前进速度和横向位移与动物的行为数据高度匹配。行走过程中的地面反作用力也类似于动物的地面反应力。我们因此预计,Pleurobot的设计方案会极其有助于今后对蝾螈运动技能的研究。
参考文献:
K. Karakasiliotis, R. Thandiackal, K. Melo, T. Horvat, N. K. Mahabadi, S. Tsitkov, J. M. Cabelguen, A. J. Ijspeert. From cineradiography to biorobots: an approach for designing robots to emulate and study animal locomotion. Interface 2016 DOI: 10.1098/rsif.2015.1089
CCAI 2016中国人工智能大会将于8月26-27日在京举行,AAAI主席,多位院士,MIT、微软、大疆、百度、滴滴专家领衔全球技术领袖和产业先锋打造国内人工智能前沿平台,6+重磅大主题报告,4大专题论坛,1000+高质量参会嘉宾,探讨人机交互、机器学习、模式识别及产业实战。门票限时六折优惠中。















 399
399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









