






8月26日至27日,在中国科学技术协会、中国科学院的指导下,由中国人工智能学会发起主办、中科院自动化研究所与CSDN共同承办的2016中国人工智能大会(CCAI 2016)在北京辽宁大厦盛大召开,这也是本年度国内人工智能领域规模最大、规格最高的学术和技术盛会,对于我国人工智能领域的研究及应用发展有着极大的推进作用。大会由CSDN网站进行专题直播,并由百度开放云提供独家视频直播技术支持。
大疆创新科技公司董事长、香港科技大学教授李泽湘的报告围绕智能机器人如何解决实际问题的努力展开,他介绍了香港科技大学机器人研究所(原自动化技术研究中心)的一些基础研究,以及如何基于理论研究设计和研发产品级的智能机器人,包括智能装备、无人机、地面移动机器人、水下机器人、服务机器人等。从机器人现代数学理论的角度,他认为,在机器人里面最重要的就是数学模型。他重点解析了机器人微分几何学,其核心就是在欧式空间下怎么样做优化的问题,但是要拓展到微分流形上去。他表示,作为一个严谨的统一的数学工具跟数学模型,微分几何理论对于处理机器人千变万化的一些应用提供了平台,不需要针对每个不同的东西去建立一个不同的数学模型。

以下为李泽湘演讲速记整理(未经演讲者本人确认):
首先谢谢大会的邀请,我研究机器人这么多年,这是第一次参加AI的会议。实际上我也一直在思考机器人跟AI到底是什么关系,各自的定位。一个简单的比喻,机器人跟AI是邻居,每一家有每一家的事情,但经常要打照面;从远一点来看,这两家又是一个村或者是一个家族的,跟外面一打架,大家就朝一个方向冲上去。这就是我给机器人和AI的定位。
我1992、1993年到香港科技大学,1995年开始自己的机器人微分几何研究,一干就很多年的时间。最后我们找到了一条路,就是怎样把机器人的微分几何理论跟珠三角中国的产业结合起来,首先我们在深圳创办了大疆,后来进一步的拓展到松山湖,通过广东省的创新团队最后打造机器人产业基地,这些事情一直都是追寻一条怎么让机智能器人解决实际问题的道路。
机器人现代数学理论
先说机器人现代数学理论的历史过程。在机器人里面最最重要的就是数学模型,最早的是欧拉定理,然后笛卡尔设立坐标系,使我们的平面点跟坐标一一对应,牛顿在这个基础上建立了微积分,然后Monge(蒙曰)把它应用到工程里面去。今天我们看到工程问题经过简化,就变成欧式空间上的一个优化问题。
一个简单的例子,我们在平面上面讨论一个Point Mass的时候,它的轨迹可以变成R^2上面的,这是人类很重要的突破,用数学的方式表达一个物理的现象,有了R^2,就是我们的Config Space,就可以算它的速度、位置,上面的动力学的优化、控制等等。一个很重要的问题,是不是足够让我们用来建立机器人的数学模型,机器人起来以后,出来一大堆问题,这里面有很多例子:
第一,旋转运动状态空间,有了这个以后就在上面做动力学、稳定学。
第二个问题就是工业机器人,他的状态空间是什么,怎么来描述我们对工业机器人所关注的系列问题。
第三类就是机器手。腿大家已经研究的差不多了,手还是一个非常非常困难的一个问题,有很多很多需要搞清楚的,首当其冲是它的数学模型,怎么分配等等问题。
再下来就是工业革命时代的结构到三维的机器人,有很多特殊性,但是这些结构的状态是什么,我们需要搞清楚。
再下来我们人体(或者其他动物)有很多关节是非常非常奇妙的,比如肩关节有正负90度的旋转空间,还有人的眼球等等,怎么建立它的模型、分析综合它的控制。
现在高端的制造业,如飞机、汽车里面关键的关节,这些状态空间是什么,在上面怎么做分析,这里面也是一大堆的问题。
还有非完整约束的运动规划,怎么灵活地操作一只笔、一个物体,一只猫怎么在空中角动量守恒的情况下自动地调整姿态,现在很热的自动驾驶汽车,实际上起步是自动停车,这是一类数学问题,这类问题怎么建立数学模型,还有在上面做规划、做控制。
中国制造2025,关键是质量,质量标准、公差标准怎么用数学模型来准确地定义,检测,然后获得产品的质量标准,这也是一大堆的问题。
大部分的机器实际上都有各种各样的误差,怎么去定位它跟加工工件的相互关系,它有各种各样不同的工件,包括对称的和不对称的。
机器人不再是单兵作战,机器人跟其他的设备在一个环境工作,两个手臂的机器人,它的状态空间是什么,在上面怎么做,是一系列的问题。一个工作单元有多台机器人,有各种传感器,有各种各样其他的设备,作为一个合作体,它们的状态空间怎么去描述。
前面讲了欧式空间,或者说是Euclidean Geometry,2000多年大家都觉得这是世界上所有需要的Geometry,但是到了18世纪,出现了Non-Euclidean Geometry。高斯研究了一维两维的几何,它的博士后黎曼把它拓展到三维和更高维,S.Lie又在这个基础上研究了一些特殊的流形。所以我们希望找到一种数学方法,它不只能够完成对欧式空间的描述,而且能够拓展到Non-Euclidean Geometry,所以陈省身、J.Marsden(我的数学导师)等数学家不只是对世界的数学做了很大的贡献,而且在工程界也是影响巨大。他们是数学和工程的一个桥梁。
早期我们还不知道这些数学工具,只能是用欧式的方法来描述复杂运动的东西,所以就产生了经典的Screw Theory,一个代表是柏林工业大学的校长F.Reuleaux发现6个低负产生的运动有些特点,但不知道这些特点怎么描述,还有更多的数据工具,都是大家在朦朦胧胧、似懂非懂的时候发明出来的一些经典的方法。
真正在机器人领域拨开云雾的是卡夫大学的R.Brockett,他第一次把微分流形、微分几何的数学工具用到了机器人领域,奠定了机器人的现代数学工具,他有几个博士生在这方面做了很多非常了不起的工作。最后有人把这个工具用到计算机视觉领域,还有加州理工、CMU很多学者把它用到各个领域,所以全球机器人领域的很多著名学者都在这里做了很多工作。
机器人微分几何理论
简单地说微分几何理论。在欧式空间下怎么样做优化的问题,大家都很熟悉,就是极大极小优化的问题,但是要利用欧式空间的几何特征,怎么把这些东西拓展到微分流形上去。所谓微分流形,一个简单的例子就是地球,用经度和纬度定位地球上的一个点,同时还有北极、南极、子午线,所以一个坐标是不能把所有的点都描述起来的,还要换一个坐标,使得他的奇异点跟前面的不一样,然后再要求它有两个坐标的时候,其坐标变化是smooth,把所有的这些都放在一块,就构成了一个微分结构,所以概括地说,一个微分流形就是一个单位球加上一个微分结构。
举些例子,欧式空间是一个最最简单的例子,还有两自由度的机械臂的状态空间,六自由度工业机器人的状态空间。流形上面也还可以增加额外的结构,就是群体结构,描述姿态的时候发现所有的姿态矩阵可以乘起来,这个群体结构跟流形结构契合的时候叫做群,一般的单体运动也是一个群。群是一个非常有意义的东西,我们要做计算的时候,它有一个最自然的Point Mass。所以有了这些东西以后,就可以选择最自然最好的坐标体系。
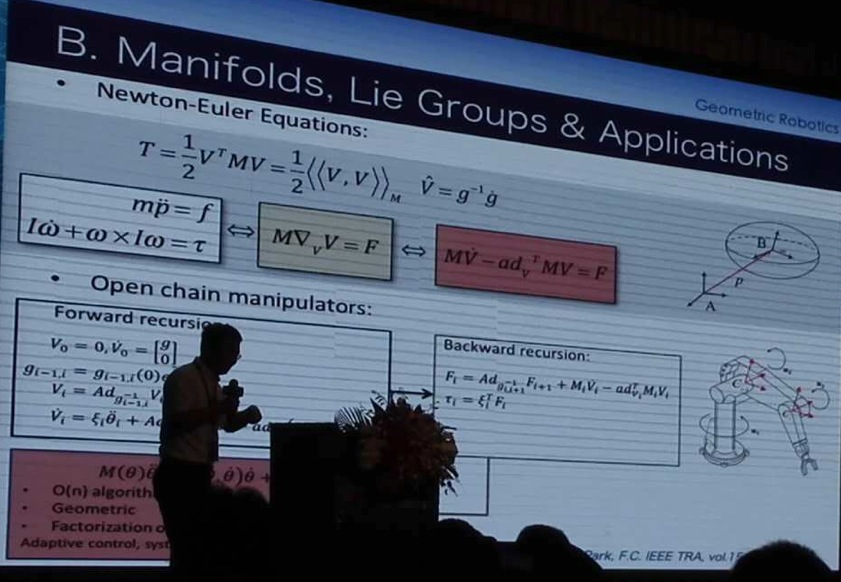
有线性空间就有一个子空间,有群就有子群,欧式群下面有很多特殊的子群,一维的旋转是一个,6个低负产生的单体运动也构成6个子群。在这个基础上,工业机器人的运动学很简单就写出来,有了这个,后面的东西就顺势而为了。刚刚讲的那几个运动,猫的姿态状态空间,在上面得到一个非线性控制系统,有些欧式群有些subset并不是closed,但它还是光滑的,这叫子流形,像五个角,人的眼球运动,都是旋转空间的两维子流形,但是这两个子流形有很大的差异。以前做数学的人搞不懂这个差异,用B.Manifolds能描述很多很奇妙的机构,包括人的肩关节、人的眼球等。在上面可以量度距离,量度能量最优、时间最短的轨迹,因为我们搞机器人,最优永远是我们追求的目标。
一个单体运动有两部分,欧拉方程和牛顿方程,以前大家都把它们分开处理,实际上这里面有一个mation,用这个东西计算,就是牛顿-欧拉方程,有了它再去formula机器人的动力学,算法就是最优的算法,后面就顺理成章了。我们抓一个物体、操作一个物体的时候,要怎么来优化和分配抓取力,就像大狗都要解决这些问题。这个问题可以把变成是黎曼流形上面的凸优化问题,这样可以有恰当的解决方案,后面一系列的问题就可以迎刃而解。
再一类流形,就是学微分几何的工程的同学最头痛的,叫Homogeneous space,但是搞清楚之后,很多问题都非常简单。首先,怎么描述一个对称物体的路线,要把它对称的这个子群怎么系统地去掉,但是这也会产生一种新的流形。如果有了对称性,它就变成Homogeneous space,所以不需要每个不同的对称问题都去做一个formulation,一个single formulation就能够解决一系列对称问题的定位问题。
中国制造2025最重要的,就是公差怎么用数学表示。以前都是用图形表示,图形表示是模糊的,supplier和发货单位经常因为不同的理解而产生纠纷,美国专门成立了一个committee,一百多个科学家、工程师,用10年的时间终于给出了公差的数学表示,但那群人不知道微分几何,只是用欧式空间来做,所以只是局部地解决问题。这里面有很多公差的表达形式,如果知道Homogeneous space,你就会发现所有的这些公差都是Homogeneous space上面的一个mini mass的问题,很快就能够解决,这样你的算法是所有不同的case一次就解决。
理论研究的实际应用
最后讲一讲怎么样把这些东西用到实际中去。当然我们得益于深圳在80年代、90年代一个很重要的一个运动——产业转型升级,当时深圳没有高校,没有研究所,他们就想出一招“借鸡下蛋”,让香港、内地的学校到深圳来建立产学研基地,完成深圳的转型升级。在这样的背景下,我们做的东西就是装备制造的核心技术控制系统,因为我们觉得中国的制造业不能一直依靠国外的设备来支撑,要做设备需要核心的东西,就是大脑、控制器。我们终于有了自己的产业园区,而且是按工业4.0的标准来建立一个自动化生产线。不宣传产品,但是可以说我们今天是中国运动控制最大的企业,占有50%以上的份额。重要的一点是我们帮助珠三角、中国发展了装备产业,而且工业4.0跟智能时代为我们下一步的发展提供了一个很好的机遇。
从这个历程,我学到了很多东西,很重要的一点就是我们需要培养什么样的学生,培养什么样的技能,他在创新创业的第一线才能够真正地扮演重要的角色。以前我们招好学校的成绩好的学生,最后发现这条路不通。很幸运,我在科大教了一门课,一个机器人设计比赛的课程,让不同的学生在一块设计几代机器人,知道系统怎么设计,时间项目的管理、团队合作,而且为了加快周期,我让他们到深圳华强北去把零部件做PCB做加工,原来在科大要花三个星期甚至一个月才完成一次迭代,这样就只要一两天就完成一个迭代,这是最最关键的一个点。
从这门课走出了一批创业人才。以前我的学生要么去硅谷,要么去金融界,但这整个改变了我实验室的现状。有水上机器人、无人机、自动化等方面的创业。汪滔毕业设计就想做一个直升飞机的控制器,因为那时候玩直升飞机太不爽,要花6个月才能学会怎么玩,他就想把这个事情变得很简单,毕业设计就做了一个控制器来做这个事情。为了弥补学费,2006年他在深圳设立了大疆创新,希望能卖几十个控制器。后面四甲起来了,然后他又开始做四甲控制器。中间有很多故事,我们也想跟别人合作,但是命运的分配非常的不合理,那个时候深圳处在一个以山寨为荣的时代,最后我们自己做各种各样的东西。
我真正看到的无人飞机是改变人类的一个东西。我们来看农业。我是从农村来的,农民最辛苦的一件事情就是喷洒农药,一个农民一天喷洒农药只是做八九亩地。而利用基于人工智能技术的无人机喷洒农药,一个人一天可以操作2部飞机,完成1200亩的农药喷洒任务,把效率提高100多倍。尤其现在要农业4.0,要把大数据精准农业做起来,一定是机器人技术人工智能技术大数据技术,整个整合到农业里面去。
还有一个例子,就是自动化。也是两个学生,要做工业机器人,但是做工业机器人不是那么容易的事情,我们做了大量的调研,原来的四大公司实际上都是从汽车产业出来,所以这种机器人用简单的话说就是“傻大笨粗”。中国有个独特的产业叫3C产业,计算机、手机、消费电子产品的制造,全世界70%的产品都在中国制造,然后两千多万工人天天就这样进行装配,我们能不能把这个产业颠覆掉,用机器人来完成任务,这个挑战很巨大。
再一个例子,是四个本科生,他们所有水上的娱乐交通工具,用新能源用智能的技术来解决。所以这是从我实验室在过去的阶段,我自己参与的几个例子。
我们从这里面获得一些体会,就是我们在科大学习、研究,然后到深圳到完成产业化。我有很多美国的朋友过来,就说这个地方外面的人看叫Hollywood of Makers,可以把任何理想梦想变成实际,以前这一块都是为西方的品牌服务的,今天它为中国的品牌探索提供得天独厚的东西。
综合这些年这些公司走过的路、犯过的错误,摸索出来的东西,更多的中国的创业者,甚至全世界机器人的创业者,都需要这样一个品牌,所以我们打造了一个松山湖孵化基地产业基地,我们给他们提供各种各样的零部件,提供各种各样的产业链的支持,各种各样的基金,还有各种各样的指导,让他们把他的梦想变成现实,而且机器人可以是无处不在的,天上、地下、家里等等各个地方,这就是松山湖的地位,我们正在打造的平台,这大概是2年后的一个情况。
我们有句话,“不管白猫黑猫,抓住老鼠就是好猫”。猫不管是白的还是黑的,都是我们的手段、工具,今天的AI是一只黑猫,机器人的这些理论是白猫,真正谁白谁黑没意思,关键的是能不能抓到老鼠,抓到大老鼠,而且真正的好猫要能够合作,就像村里人打架的时候,所有的村民都要往一个方向跑,所以重要的就是合作,抓住老鼠才是好猫。
下面我就给大家指出几个大老鼠。当然一个大老鼠大家都很关注,就是自动驾驶。另外一个大老鼠就是3C产业的制造自动化,这也是机器人领域或者是制造领域非常难解决的问题,3C产品非常多,通讯、计算机、消费电子,甚至现在的汽车也变成一个消费的产品——至少是一个电子的产品,跟做一个电脑做一个手机确实没什么太大的差别,目前工业机器人只能完成一些最简单的打磨、剖光等工作,越到后面就越困难了,基本上是一筹莫展。到珠三角、长三角甚至周边的企业去看,我们今天的工厂跟80年代卓别林的电影没有什么差别,整个制造业没有太大的改变,除了环境也许好一些,但工人的地位非常低,就像一部机器一样在生产线上,没有尊严,可能相比在农村里面没有吃没有喝要好很多,但是现在都是独生子女,家长不愿意把小孩送到生产线上去。
目前的工厂的布局,成百上千的工人一条一条地就在那里面完成手机的装配任务,怎么样从目前的场景变成一个全自动化或者是无人或者是很少人的场景,这个不会一个晚上就发生,会有一个过渡的过程,首先一些关键的工人,他会用机器以一个工作的单元所取代,然后到最后再变成一个整个的全自动化的装备,这里面就会产生很多很多的问题,传感器、智能机器人、工业互联网、机器学习、大数据、机构设计,都要一村的人聚在一块来解决这个问题。我相信软件、机器学习、人工智能在这里面可以找到很多很多的应用,关键的问题是大家要沉下心来。
总结
首先,我想说的是机器人的微分几何理论,作为一个严谨的、统一的数学工具和数学模型,对于处理机器人千变万化的一些应用提供了一个平台,你不需要针对每个不同的东西去建立一个不同的数学模型。其次,经过30多年的研究,这个工具已经非常的成熟,所以下面就是瞄准几个大老鼠,两个不同的猫要解决的问题,他是有共性的。第三,很重要的一点,就是快速的迭代,把想法变成实际变成产品,中国30年的发展提供了一个得天独厚的条件。这就是我要讲的,谢谢大家。
本文为现场实录,未经演讲者本人确认。CCAI 2016更多精彩信息,请关注CSDN独家直播专题。
想了解人工智能背后的那些人、技术和故事,欢迎关注人工智能头条:
















 1223
1223











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









