







 该博客介绍了如何在OpenCV环境下实现贝塞尔曲线的绘制,包括修改控制点、连接多条曲线以及调整曲线精度等功能。提供了一个程序示例并提供了代码下载链接。
该博客介绍了如何在OpenCV环境下实现贝塞尔曲线的绘制,包括修改控制点、连接多条曲线以及调整曲线精度等功能。提供了一个程序示例并提供了代码下载链接。
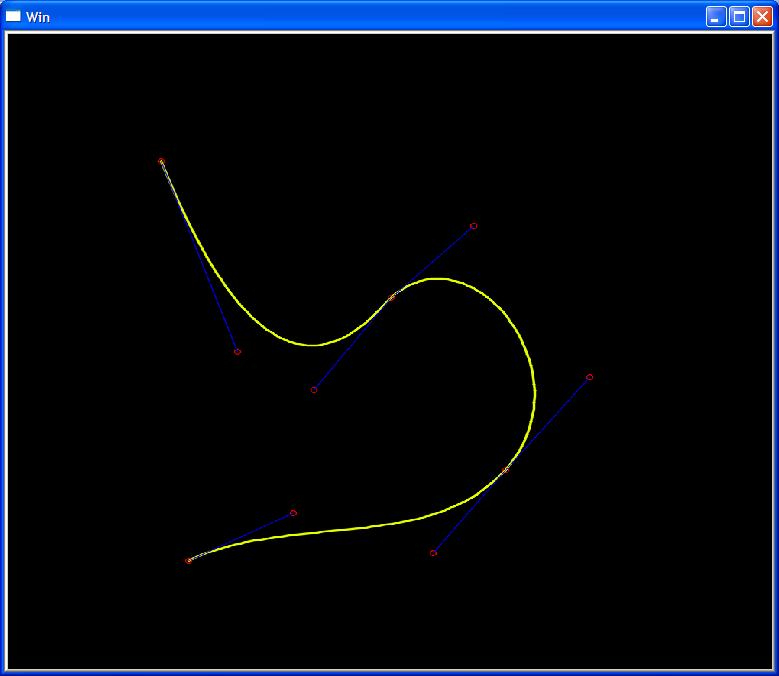
因需要研究了一下贝赛尔曲线,并在opencv下实现. 可以修改控制点,连接多条曲线,修改曲线精度。
程序示例如下:
代码下载:
opencv_share@163.com download
代码如下:
 //
TrainingTools.cpp : 定义控制台应用程序的入口点。
//
#include
"
stdafx.h
"
#include
<
iostream
>
#include
<
string
.h
>
#include
<
cxcore.h
>
#include
<
cv.h
>
#include
<
highgui.h
>
#include
<
fstream
>
using
namespace
std;
const
int
WW_MAX_MARK_COUNT
=
40
;
//
最大40个控制点
int
mark_count
=
4
;
int
conner_pt_index
=-
1
;CvPoint3D32f Control_pts[WW_MAX_MARK_COUNT];IplImage
*
image
=
0
;
//
原始图像
bool
is_showControlLines
=
true
;
//
两个向量相加,p=p+q
//
TrainingTools.cpp : 定义控制台应用程序的入口点。
//
#include
"
stdafx.h
"
#include
<
iostream
>
#include
<
string
.h
>
#include
<
cxcore.h
>
#include
<
cv.h
>
#include
<
highgui.h
>
#include
<
fstream
>
using
namespace
std;
const
int
WW_MAX_MARK_COUNT
=
40
;
//
最大40个控制点
int
mark_count
=
4
;
int
conner_pt_index
=-
1
;CvPoint3D32f Control_pts[WW_MAX_MARK_COUNT];IplImage
*
image
=
0
;
//
原始图像
bool
is_showControlLines
=
true
;
//
两个向量相加,p=p+q

 CvPoint3D32f pointAdd(CvPoint3D32f p, CvPoint3D32f q)
...
{
CvPoint3D32f pointAdd(CvPoint3D32f p, CvPoint3D32f q)
...
{
 p.x += q.x; p.y += q.y; p.z += q.z; return p;
p.x += q.x; p.y += q.y; p.z += q.z; return p; }
//
向量和标量相乘p=c*p
CvPoint3D32f pointTimes(
float
c, CvPoint3D32f p)
...
{
p.x *= c; p.y *= c; p.z *= c; return p;}
//
计算贝塞尔方程的值
//
变量u的范围在0-1之间
//
P1*t^3 + P2*3*t^2*(1-t) + P3*3*t*(1-t)^2 + P4*(1-t)^3 = Pnew
CvPoint3D32f Bernstein(
float
u, CvPoint3D32f
*
p)
...
{
CvPoint3D32f a, b, c, d, r; a = pointTimes(pow(u,3), p[0]); b = pointTimes(3*pow(u,2)*(1-u), p[1]); c = pointTimes(3*u*pow((
}
//
向量和标量相乘p=c*p
CvPoint3D32f pointTimes(
float
c, CvPoint3D32f p)
...
{
p.x *= c; p.y *= c; p.z *= c; return p;}
//
计算贝塞尔方程的值
//
变量u的范围在0-1之间
//
P1*t^3 + P2*3*t^2*(1-t) + P3*3*t*(1-t)^2 + P4*(1-t)^3 = Pnew
CvPoint3D32f Bernstein(
float
u, CvPoint3D32f
*
p)
...
{
CvPoint3D32f a, b, c, d, r; a = pointTimes(pow(u,3), p[0]); b = pointTimes(3*pow(u,2)*(1-u), p[1]); c = pointTimes(3*u*pow((
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5024
5024

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









