







要在 RViz2 中创建一个可视化的机器人,首先需要有一个机器人的 URDF (Unified Robot Description Format) 文件。URDF 文件描述了机器人的物理组成和关节等动态特性。接下来,就可以使用 RViz2 来加载和查看这个模型。
一. urdf简介与转换
在 ROS(Robot Operating System)的环境中,URDF(Unified Robot Description Format)是用于描述机器人模型的 XML 格式。虽然手动编写 URDF 文件是一种常见的做法,但也存在一些可视化工具可以帮助简化和加速这一过程。以下是一些可用的工具,它们可以在创建和编辑 URDF 文件时提供图形界面或可视化支持:
1. SolidWorks to URDF Exporter
描述:这是一个 SolidWorks 插件,允许用户直接从 SolidWorks CAD 软件中导出 URDF 文件。这个工具特别适合那些已经使用 SolidWorks 设计机器人的用户。
链接:SolidWorks to URDF Exporter on GitHub
2. Fusion 360 to URDF Exporter
描述:Autodesk Fusion 360 用户可以利用这个插件将他们的 CAD 模型转换成 URDF 格式。这提供了从流行的 CAD 软件到 ROS 的无缝过渡。
链接:Fusion 360 to URDF Exporter
3. SW2URDF (SolidWorks to URDF Exporter)
描述:这是 SolidWorks 的另一个插件,用于将 SolidWorks 模型转换为 URDF。它支持导出复杂的装配体,并包括联动和其他动态特性。
链接:通常可以在 SolidWorks 插件市场或 ROS 社区资源中找到。
4. Phobos
描述:Phobos 是一个 Blender 插件,使用户能够在 Blender 内编辑和导出 URDF 文件。这不仅可以创建静态模型,还可以定义动态属性和机器人的运动学。
链接:Phobos on GitHub
5. URDF for Blender
描述:这是另一个 Blender 插件,专注于改进 Blender 制作的模型到 URDF 格式的转换过程。它适用于希望在图形界面中操作并直观看到结果的用户。
链接:URDF for Blender
二. 创建包及文件
1.创建包
ros2 pkg create rviz2_4_udf_package --build-type ament_python
这个包可以在某个文件夹的src文件夹下。
packagename:rviz2_4_udf_package
编译方式:ament_python
2. 建立urdf文件夹及文件、建立launch文件夹及文件
cd rviz2_4_udf_package/
mkdir urdf
cd urdf
touch virtural_botbase.urdf
cd ..
mkdir launch
cd launch
touch display_rviz2.launch.py
现在的文件夹结构如下:
├── launch
└── display_rviz2.launch.py
├── package.xml
├── resource
└── rviz2_4_udf_package
├── rviz2_4_udf_package
└── __init__.py
├── setup.cfg
├── setup.py
├── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
└── urdf
└── virtural_botbase.urdf
3.打开编辑urdf文件
参考 fishros 8.2 RVIZ2可视化移动机器人模型中的模型构建
以下代码为构建一个4轮麦克纳姆轮的正方形底盘
<?xml version="1.0"?>
<robot name="mecanum_robot">
<!-- Base Link -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.5 0.1"/> <!-- Length, Width, Height -->
</geometry>
<material name="blue">
<color rgba="0 0 1 1"/> <!-- RGBA Colors -->
</material>
</visual>
<collision>
<geometry>
<box size="0.5 0.5 0.1"/>
</geometry>
</collision>
</link>
<!-- Mecanum Wheels -->
<!-- Wheel Front Left -->
<link name="wheel_front_left">
<visual>
<geometry>
<cylinder length="0.1" radius="0.05"/> <!-- Height and radius of the wheel -->
</geometry>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
</collision>
</link>
<!-- Joint connecting front left wheel to base -->
<joint name="joint_front_left" type="continuous">
<parent link="base_link"/>
<child link="wheel_front_left"/>
<origin xyz="0.25 0.25 0" rpy="0 0 0"/> <!-- Position of the wheel -->
<axis xyz="0 0 1"/> <!-- Rotation axis -->
</joint>
<!-- Similar definitions for other three wheels -->
<link name="wheel_front_right">
<visual>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
</collision>
</link>
<joint name="joint_front_right" type="continuous">
<parent link="base_link"/>
<child link="wheel_front_right"/>
<origin xyz="0.25 -0.25 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
</joint>
<!-- Rear Left -->
<link name="wheel_rear_left">
<visual>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
</collision>
</link>
<joint name="joint_rear_left" type="continuous">
<parent link="base_link"/>
<child link="wheel_rear_left"/>
<origin xyz="-0.25 0.25 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
</joint>
<!-- Rear Right -->
<link name="wheel_rear_right">
<visual>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
</collision>
</link>
<joint name="joint_rear_right" type="continuous">
<parent link="base_link"/>
<child link="wheel_rear_right"/>
<origin xyz="-0.25 -0.25 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
</joint>
</robot>
**基本结构:**机器人包括一个基本的 base_link 和四个 wheel_ 链接。
**视觉和碰撞元素:**每个链接都有视觉和碰撞属性定义。视觉属性定义了该部件的外观,碰撞属性定义了物理交互时的形状。
**关节:**每个轮子通过一个类型为 continuous 的关节与底盘相连。这允许轮子围绕其安装点无限旋转。
4.编辑launch文件
import os
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
package_name = 'rviz2_4_udf_package'
urdf_name = "virtural_botbase.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
robot_state_publisher_node = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
arguments=[urdf_model_path]
)
joint_state_publisher_node = Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
name='joint_state_publisher_gui',
arguments=[urdf_model_path]
)
rviz2_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
)
ld.add_action(robot_state_publisher_node)
ld.add_action(joint_state_publisher_node)
ld.add_action(rviz2_node)
return ld
5. 编辑setup.py
导入库
from glob import glob
import os
设置包名称
package_name = 'rviz2_4_udf_package'
添加launch和urdf
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/**')),
完整代码
from setuptools import find_packages, setup
from glob import glob
import os
package_name = 'rviz2_4_udf_package'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/**')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='harebert',
maintainer_email='harebert@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
三. 编译及运行
1.编译
回到src以上层级文件夹,编译
colcon build
source install/setup.bash
2.安装缺失库
以下命令是在基于 Ubuntu 的系统中安装 ROS 的 joint-state-publisher-gui 和 robot-state-publisher 包。这些是 ROS 组件,用于发布机器人关节状态,并提供一个 GUI(图形用户界面)来手动操作这些关节状态,非常有用于调试和可视化机器人模型的运动。
sudo apt install ros-$ROS_DISTRO-joint-state-publisher-gui ros-$ROS_DISTRO-robot-state-publisher
在安装完毕后,可以使用如下命令来检查是否安装成功:
apt list --installed | grep ros-$ROS_DISTRO-joint-state-publisher-gui
apt list --installed | grep ros-$ROS_DISTRO-robot-state-publisher
3.运行
ros2 launch rviz2_4_udf_package display_rviz2.launch.py

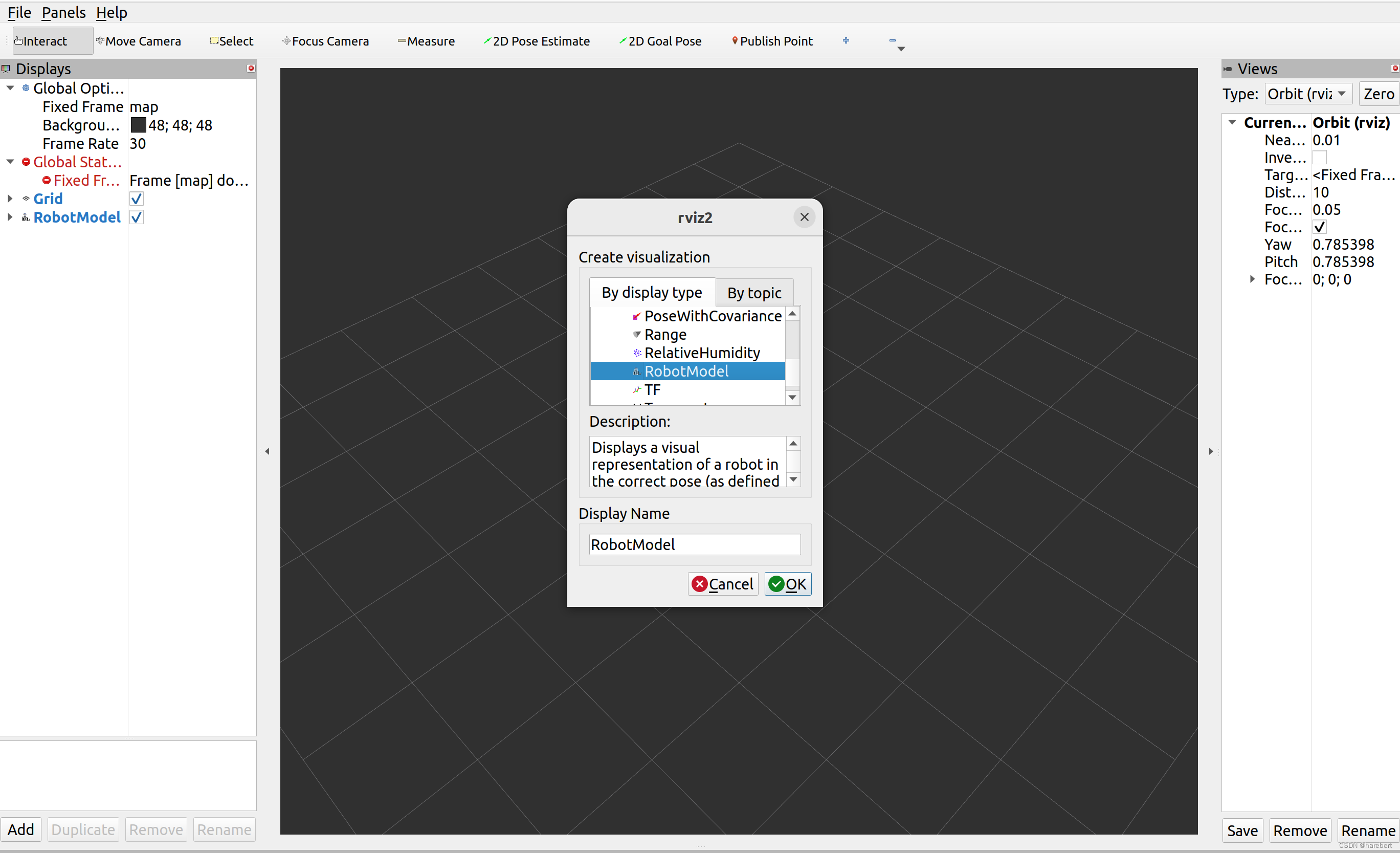
打开add按钮,添加RobotModel,然后选择当前的机器人
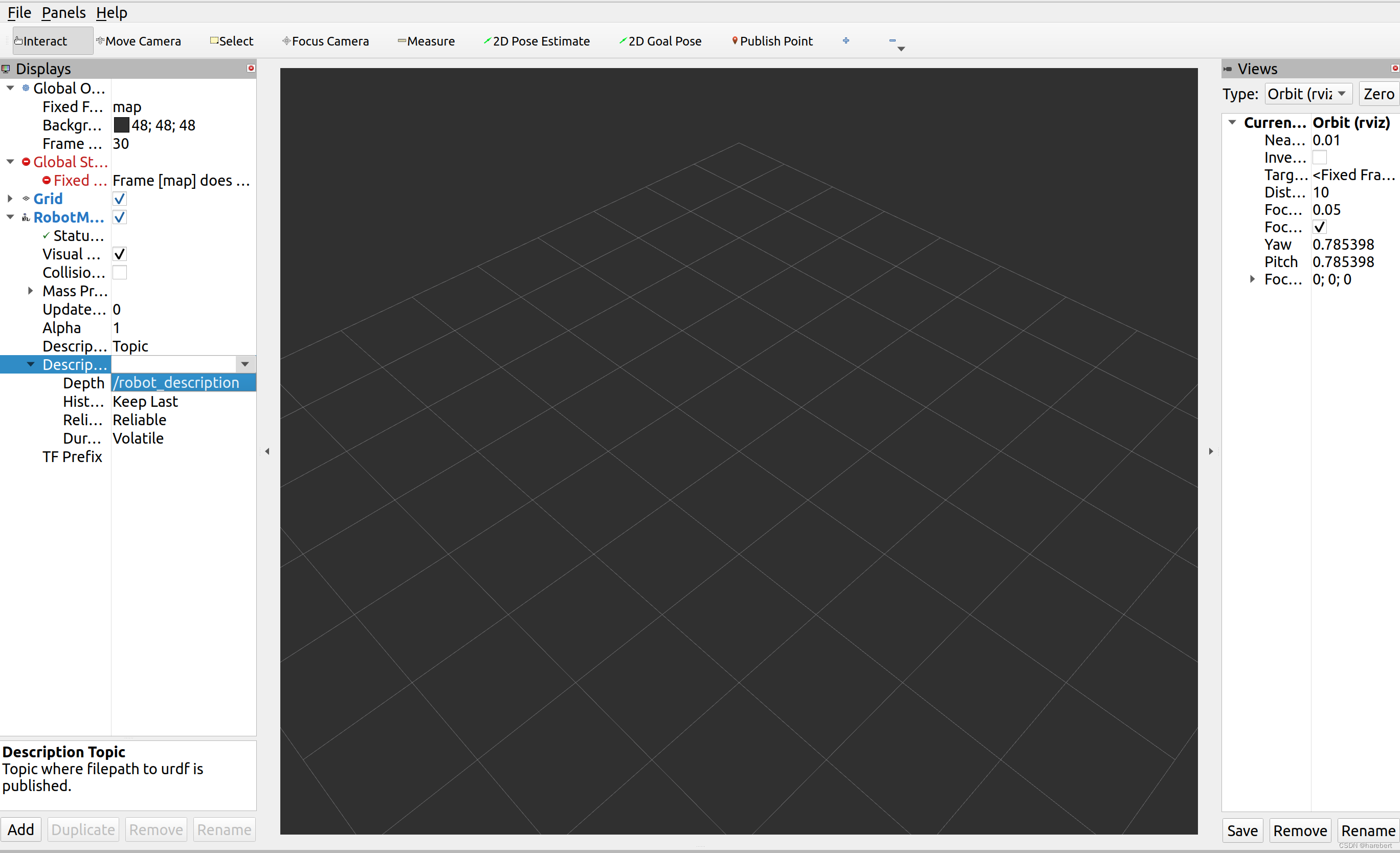
在RobotModel的DescriptionTopic中选择当前机器人
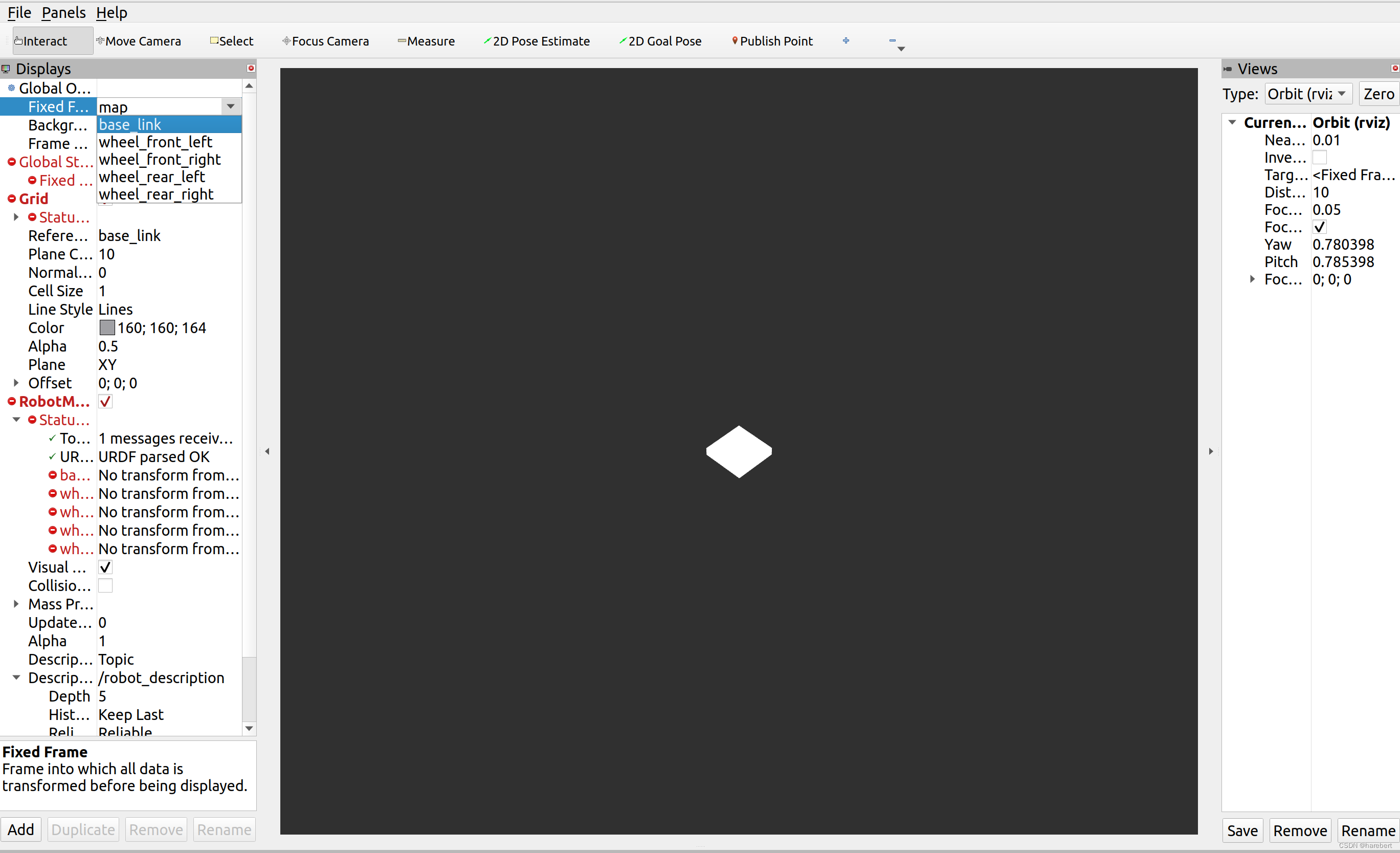
在GlobalOption的FixFrame中选择base_link
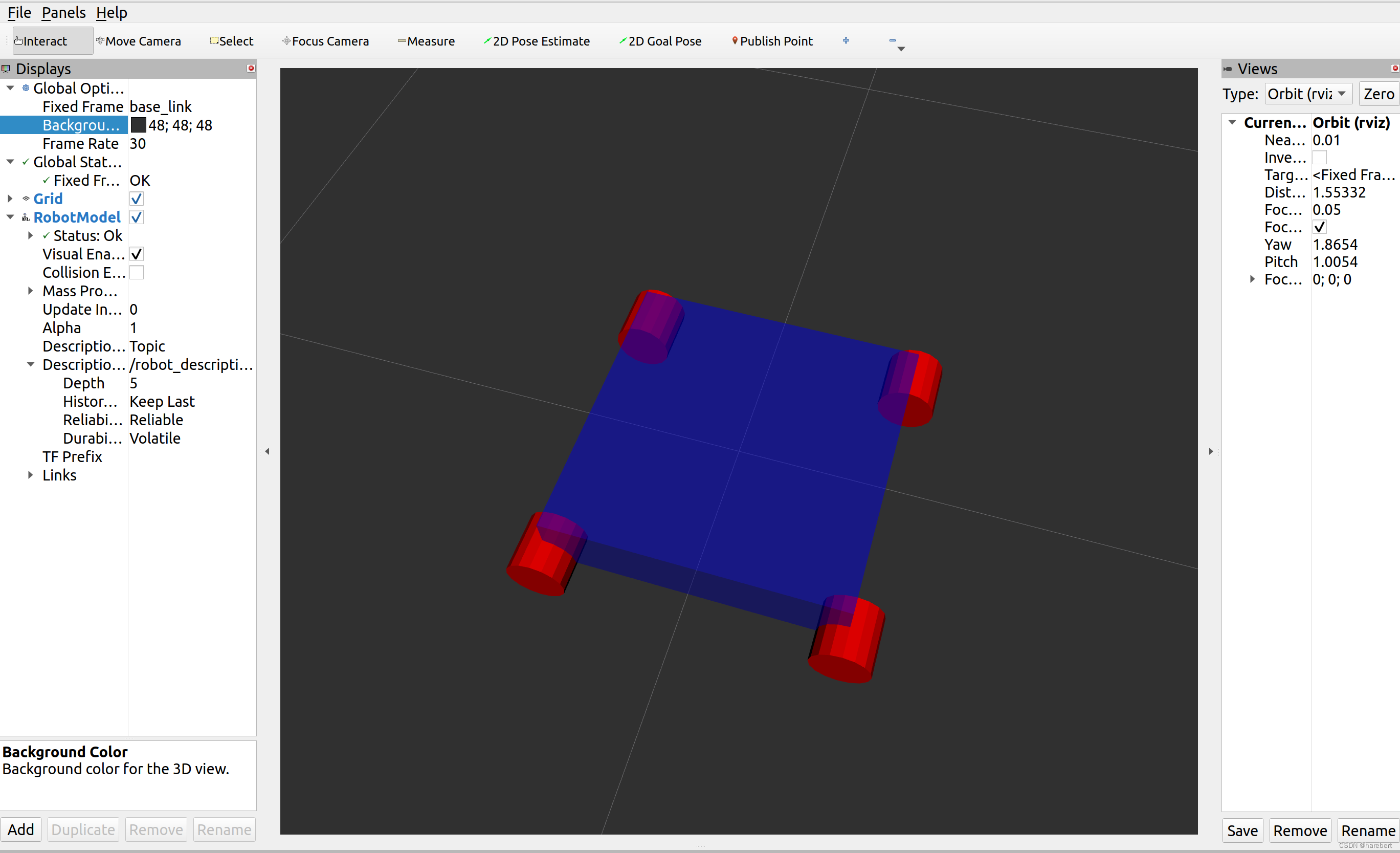
最终呈现的效果如下















 621
621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









