







芯片级的传感器(如ICM-26090)和某些功能芯片(如DAC芯片:DAC81404),在编程使用时,往往会陷入一种迷茫的境地,有点恐惧。因为往往它的参考手册长的更一本书一样。主要原因时很多芯片为了兼容各种应用场景,拥有很多我们不需要的冗余功能。
其实这些芯片用起来不难,一般来讲我们的主控芯片都可以通过SPI/I2C等通信接口,去配置这些芯片,读写芯片里的寄存器。 只要按照正确合适的方式,配置好芯片内部的某些寄存器,就能正常操作了。这与直接操作主控芯片的寄存器只是多了一个操作的方式。 主控芯片的寄存器,可以直接读写。 而传感器芯片和功能芯片需用用SPI/I2C等通信方式去操作芯片的寄存器。 下面介绍通用的一种编程思路。
1、第一步
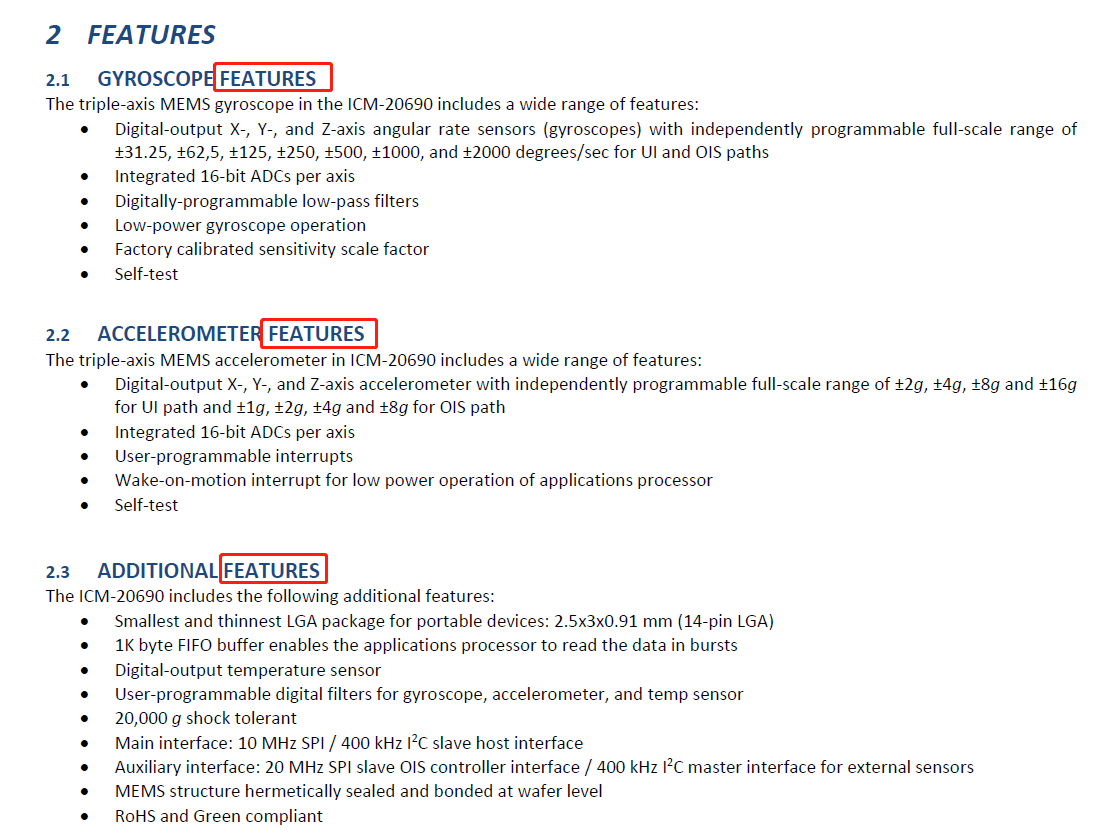
用传感器芯片或功能芯片的型号去网上下载它的参考手册。下到手册后,先看看它的功能介绍,特性介绍,了解这个芯片是干什么的,有什么特性。下面拿ICM-26090来举例说明。
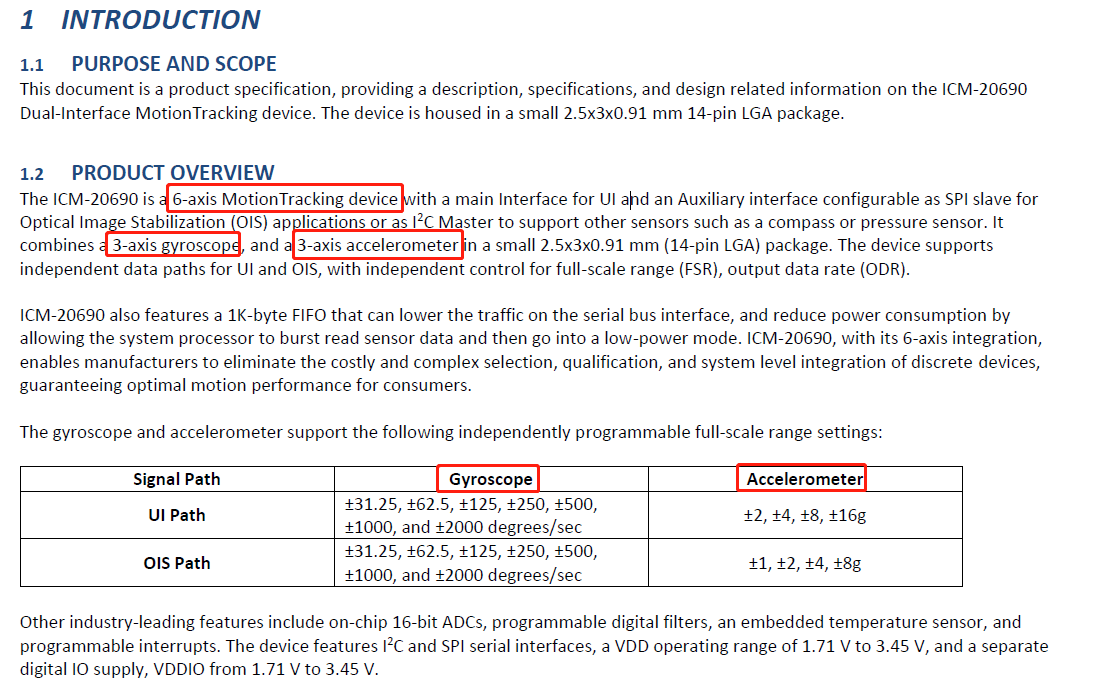
然后通篇拉通了浏览一遍,看看主芯片控制它是用什么通信方式,通信协议是怎样的。
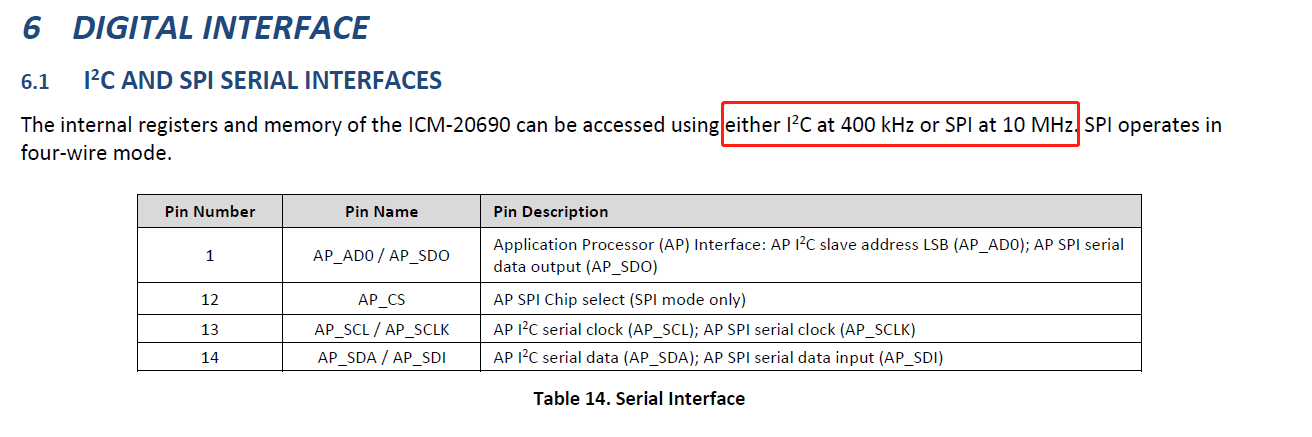
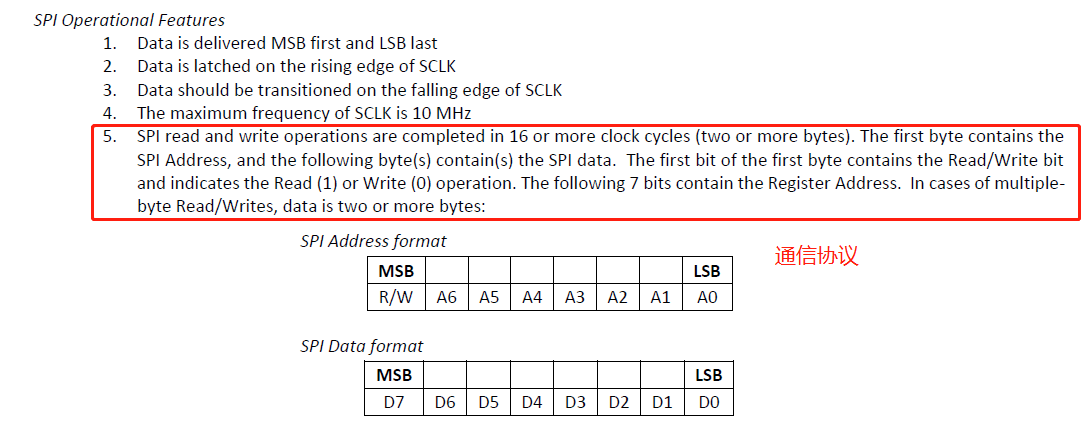
本例中的芯片可以使用I2C和SPI两种通信方式,通信协议也找到了,如上图所示。
最后就是找到芯片需要操作的寄存器。
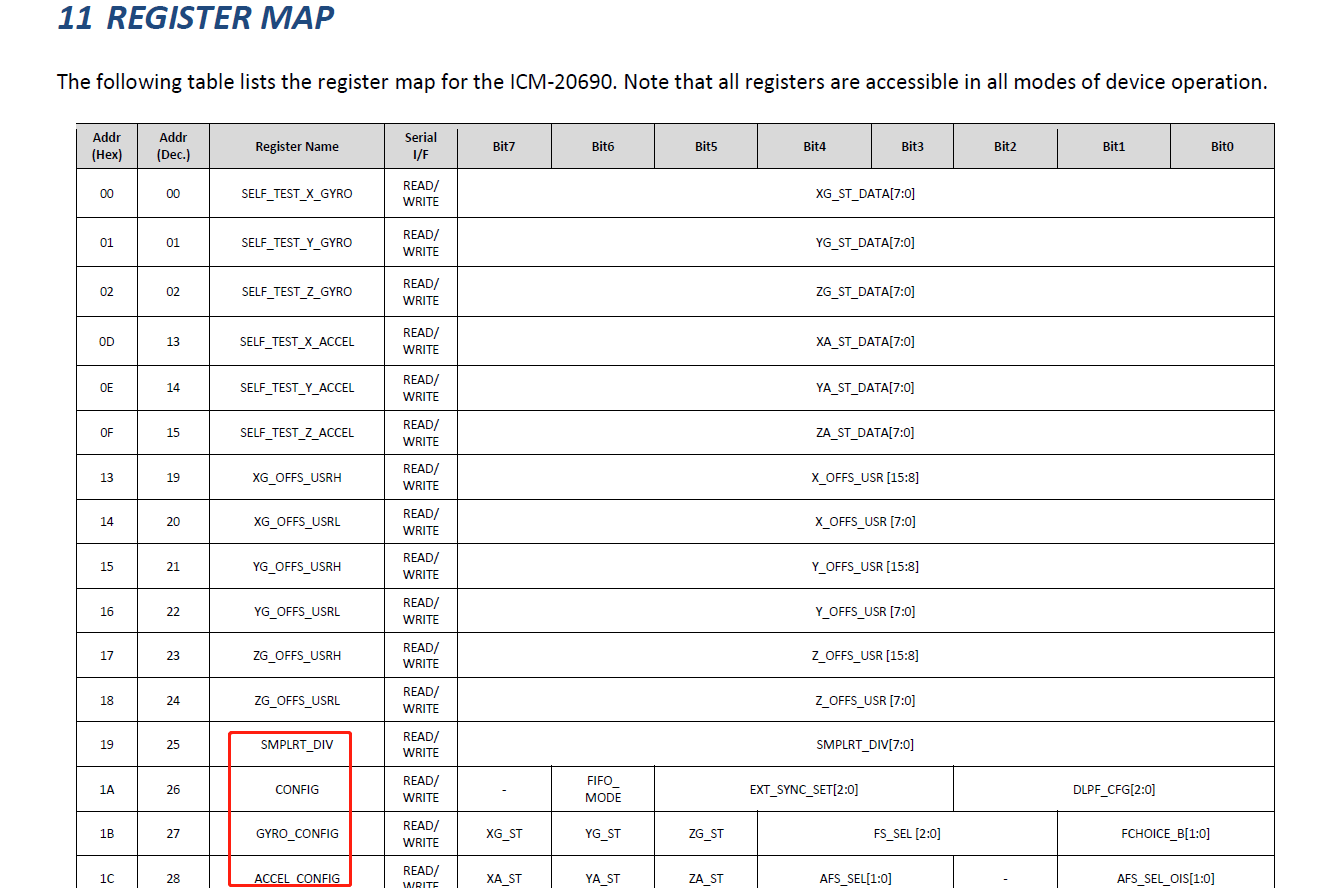
不必细读,找到了,你的第一步就完成了。
2、第二步
2.1、读设备ID
第二步主要完成一个通信测试,比如你用的SPI通信方式,协议你也知道了。编程的第一步就是先试试能不能通信。所以要进行通信测试,有个很妙的东西,就是基本上这些功能芯片都有一个可以读的东西(设备ID什么的)。
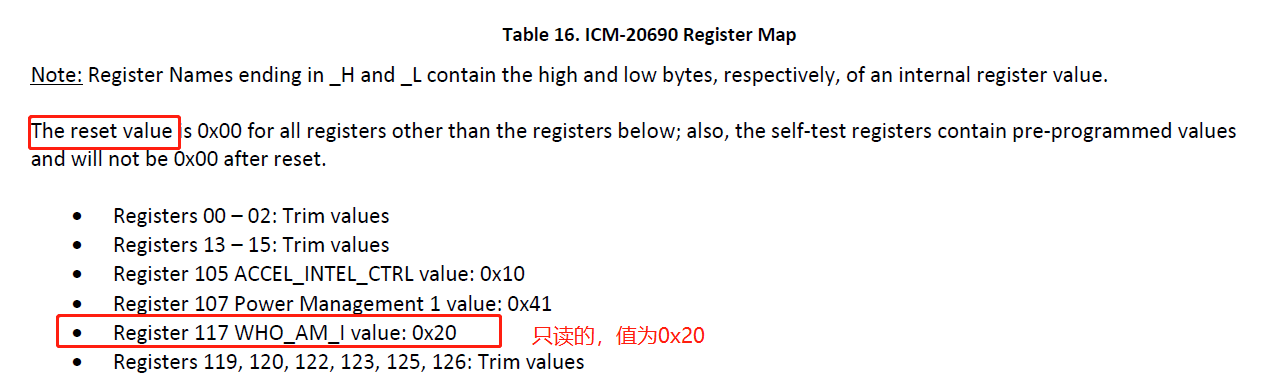
比如ICM-20690芯片里面有个WHO_AM_I寄存器

比如DAC81404芯片里,有个DEVICEID寄存器
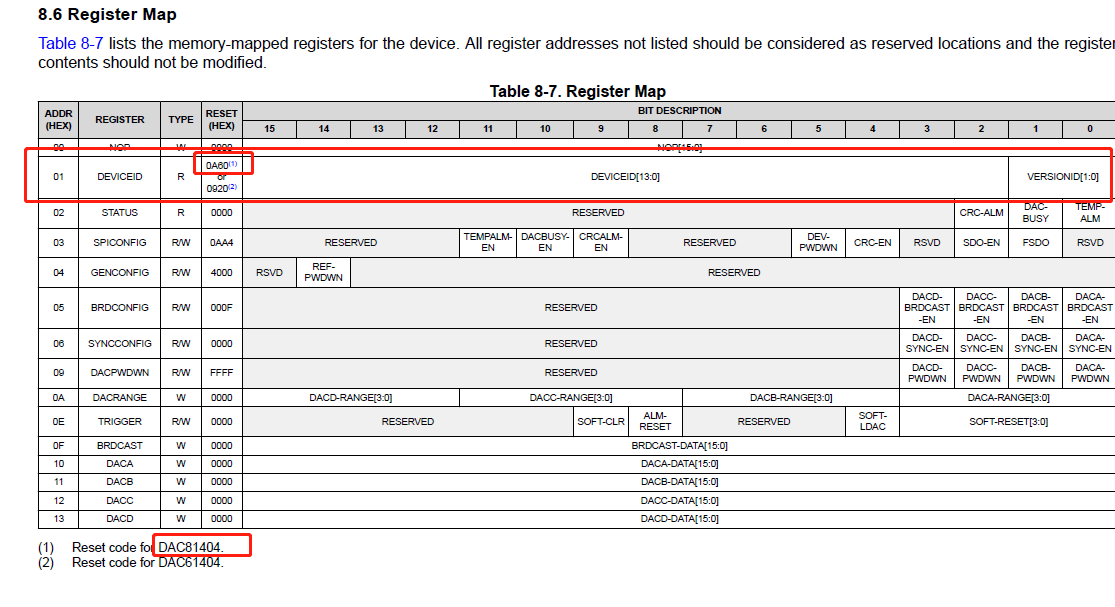
所以你通信的第一步,就是把设备ID读出来。
2.2、测试写入功能
如果你设备ID读对了,那你就可以测试写入了。根据通信协议,把(寄存器地址+写指令)+写的数据,写入某一个可读可写的寄存器(R/W), 写了之后,你又可以再读回来,看是否是你刚刚写入的数据。因为你在上一步已经通过读设备ID验证了读的功能,所以现在就是测试写功能。 写功能如果出了问题,可以看看通信协议和时序等相关内容。【我遇到的用SPI通信的芯片,你要写入数据时,你的(寄存器地址+写指令)+写的数据都是连续发送的,不能说写一个字节读一个字节,再写一个字节读一个字节,用这种断断续续的操作】 ,再不行,借助示波器看看你的输出信号。
2.3、封装芯片读写操作的函数
当你读写都没问题了,你就可以把读/写芯片的操作函数封装起来。 以便于进一步的使用。
如:
void SPI_A_READ(unsigned char addr, unsigned char * Rxdata){
spi_cs_A_Enable;
HAL_SPI_Transmit(&hspi1,&addr,1,100);
HAL_SPI_Receive(&hspi1,Rxdata,1,100);
spi_cs_A_Disable;
}
void SPI_A_WRITE(unsigned char addr, unsigned char Txdata){
unsigned char Rxdata=0x00;
spi_cs_A_Enable;
HAL_SPI_Transmit(&hspi1,&addr,1,100);
HAL_SPI_Transmit(&hspi1,&Txdata,1,100); // 经测试,地址字节和数据字节必须连续发送。 否则无法正常写入
// 接不接收都可以,接收的数据是无用的,但稳妥起见,还是接一下吧
HAL_SPI_Receive(&hspi1,&Rxdata,1,100);
HAL_SPI_Receive(&hspi1,&Rxdata,1,100);
spi_cs_A_Disable;
}3、第三步
第三步,是最后一步,也是最难的一步。就是配置芯片寄存器。这个没有什么捷径,这是避无可避的。
但我认为最有效的办法,就是把每一个需配置的寄存器(有些寄存器是只读的,那就不用配置,有些寄存器是与配置无关的,比如记录传感器最终的测量输出的寄存器)都配置一遍,穷举所有可配置的寄存器。
我一般就是把每一个寄存器的地址,全部都用宏定义先抄下来。
然后写一个config函数,比如ICM-20690芯片,就叫icm20690_config函数。
把每个需要配置的寄存器,挨个配置一遍。配置的时候,就读一读这个寄存器是啥意思。
穷举所有可配置的寄存器,劳资全部给他配置一遍,最稳妥。 很多芯片看着吓人,寄存器数量很多的,但其实很多都是冗余的,别虚。
如:
void icm20690_config(void){
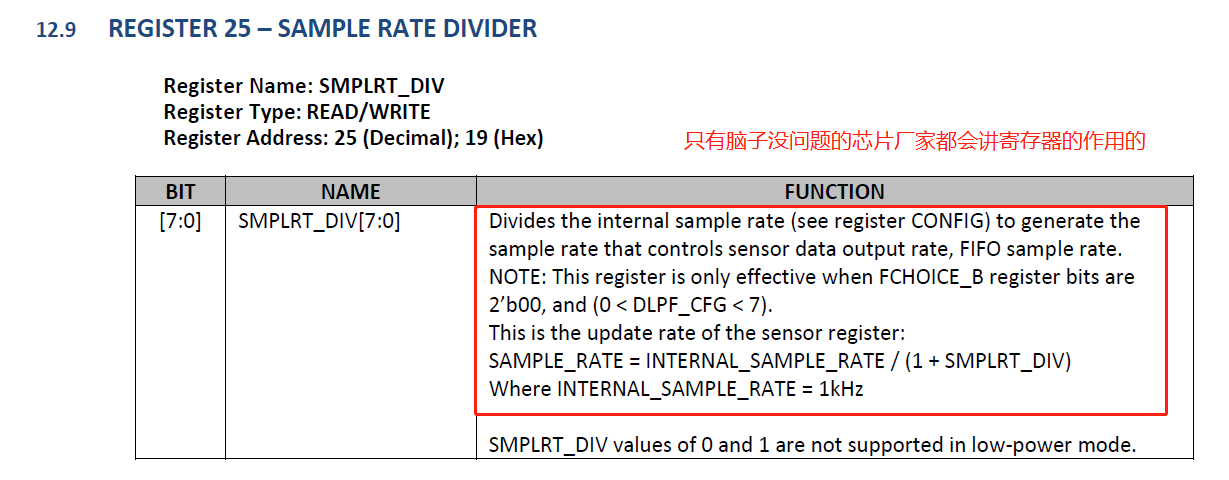
// register: SMPLRT_DIV
// This register is only effective when FCHOICE_B register bits are 2’b00, and (0 < DLPF_CFG < 7).
// register: CONFIG
// FIFO_MODE - 0
// EXT_SYNC_SET - 0
// DLPF_CFG - 0 250Hz 0.97ms 8KhZ FCHOICE_B(0 0)
SPI_A_WRITE(CONFIG_ADDR_W,0x00);
// register: GYRO_CONFIG
// XG_ST YG_ST ZG_ST 0
// FS_SEL 0 250dps
// FCHOICE_B (2'b00)
SPI_A_WRITE(GYRO_CONFIG_ADDR_W,0x00);
// register: ACCEL_CONFIG
// XA_ST YA_ST ZA_ST 0
// AFS_SEL 00 ±2g
// AFS_SEL_OIS 00 ±2g
SPI_A_WRITE(ACCEL_CONFIG_ADDR_W,0x00);
// register: ACCEL_CONFIG2
// FIFO_SIZE 00 128byte
// DEC2_CFG 3 32x averaging filter
// ACCEL_FCHOICE_B 0
// A_DLPF_CFG 7 420Hz 1.38ms 1Hz
SPI_A_WRITE(ACCEL_CONFIG_2_ADDR_W,0x37);
// register: LP_MODE_CONFIG
// GYRO_CYCLE 0 low-power gyroscope mode is disable
// GYRO_AVGCFG 111b = 7H 128x averaging filter
SPI_A_WRITE(LP_MODE_CONFIG_ADDR_W,0x70);
// register: FIFO_EN
// TEMP_OUT 1 GYRO_XOUT 1 GYRO_YOUT 1 GYRO_ZOUT 1 ACCEL_XYZ_OUT 1
SPI_A_WRITE(FIFO_EN_ADDR_W,0xF8);
// register: ODR_DELAY_EN
// ODR_DELAY_EN 0 Function is disabled.
SPI_A_WRITE(ODR_DELAY_EN_ADDR_W,0x00);
// register:INT_ENABLE
SPI_A_WRITE(INT_ENABLE_ADDR_W,0x00);
// register:FIFO_WM_TH
SPI_A_WRITE(FIFO_WM_TH_ADDR_W,0x00); // If zero then watermark interrupt is disabled.
// register:PWR_MGMT_1 2
SPI_A_WRITE(PWR_MGMT_1_ADDR_W,0x00);
SPI_A_WRITE(PWR_MGMT_2_ADDR_W,0x00);
}
4、第四步
第四步,其实不说都知道,就是测试你的配置起作用了没有,比如传感器芯片,你就把传感器输出读出来。动动你的设备,看看传感器输出有没有? 对不对? 美滋滋啊。



















 9347
9347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











