from time import time
from elasticsearch_dsl import Object
import numpy as np
import matplotlib.path as mpltPath
from matplotlib import pyplot as plt, patches
from mpl_toolkits.mplot3d import Axes3D
from mpl_toolkits import mplot3d as p3d
from scipy.spatial.transform import Rotation as Rotation
from icecream import ic
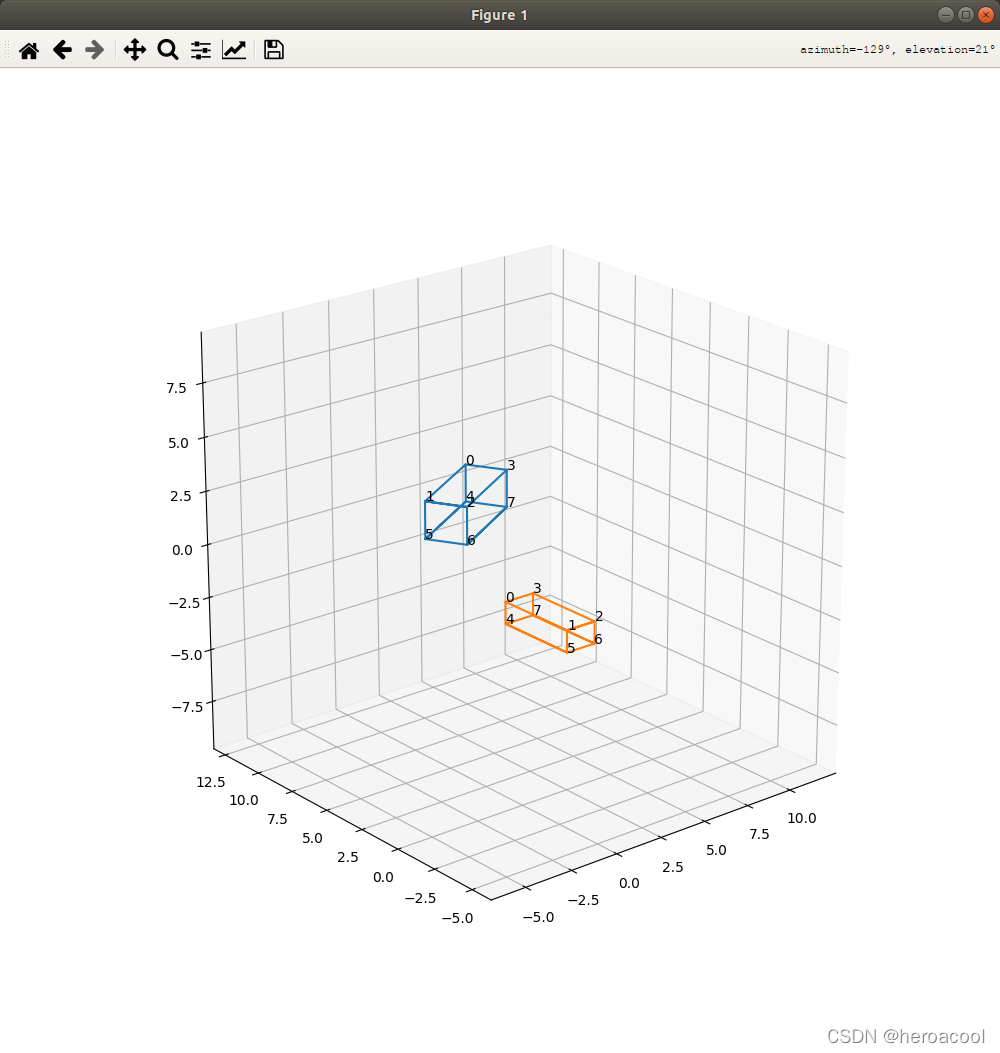
def get_lidar_box_corners(box: np.ndarray):
"""
Args:
box: [x, y, z, l, w, h, yaw]
Returns:
corners: 8 * 3
0...3
. .
. .
1...2
4...7
. .
. .
5...6
"""
l2, w2, h2 = box[3:6] * 0.5
corner_in_obj = np.array([
[l2, w2, h2],
[-l2, w2, h2],
[-l2, -w2, h2],
[l2, -w2, h2],
[l2, w2, -h2],
[-l2, w2, -h2],
[-l2, -w2, -h2],
[l2, -w2, -h2],
]).T
R_obj_to_rig = Rotation.from_euler('zyx', [box[6], 0, 0]).as_matrix()
T_obj_to_rig = box[0:3].reshape(-1, 1)
ic(T_obj_to_rig)
corners = R_obj_to_rig @ corner_in_obj + T_obj_to_rig
return corners.T
def draw_box3d(ax: Axes3D, corners: np.ndarray):
assert corners.shape == (8, 3)
indice = [0, 1, 2, 3, 0, 4, 5, 6, 7, 4, 5, 1, 2, 6, 7, 3]
new_corners = corners[indice]
ax.plot(new_corners[:, 0], new_corners[:, 1], new_corners[:, 2])
for i, point in enumerate(corners):
ax.text(point[0], point[1], point[2], str(i))
ic(new_corners.shape)
def set_aspect_equal(ax):
"""
Fix the 3D graph to have similar scale on all the axes.
Call this after you do all the plot3D, but before show
"""
X = ax.get_xlim3d()
Y = ax.get_ylim3d()
Z = ax.get_zlim3d()
a = [X[1]-X[0],Y[1]-Y[0],Z[1]-Z[0]]
b = np.amax(a)
ax.set_xlim3d(X[0]-(b-a[0])/2,X[1]+(b-a[0])/2)
ax.set_ylim3d(Y[0]-(b-a[1])/2,Y[1]+(b-a[1])/2)
ax.set_zlim3d(Z[0]-(b-a[2])/2,Z[1]+(b-a[2])/2)
ax.set_box_aspect(aspect = (1,1,1))
def test_get_lidar_box_corners():
boxes = np.array([
[5, 10, 0, 5, 2, 1.8, np.pi / 6],
[-1, -3, 0, 4, 1.5, 1, np.pi / 2],
])
plt.rcParams["figure.figsize"] = (10,10)
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
for i, box in enumerate(boxes):
ic(i, box)
corners_in_rig = get_lidar_box_corners(box)
ic(corners_in_rig)
draw_box3d(ax, corners_in_rig)
set_aspect_equal(ax)
plt.show()
if __name__ == "__main__":
test_get_lidar_box_corners()
exit(-1)

























 554
554

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









