Vivado 摸鱼记录 Day_10 ๑乛v乛๑
review
day_9 实现了串口发送模块与使用 Vivado 串口通信(UART)------串口发送-CSDN博客
day_8 串口发送原理 Vivado 串口通信(UART)原理A ------串口发送实验-CSDN博客
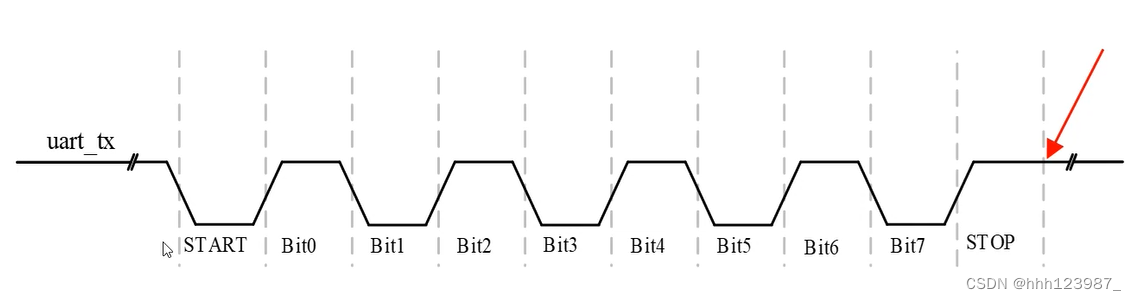
串口发送:并 ---> 串
串口接收:串 ---> 并
1. 串口接收原理
小梅哥视频链接 13A_UART串口接收逻辑设计要点分析_哔哩哔哩_bilibili
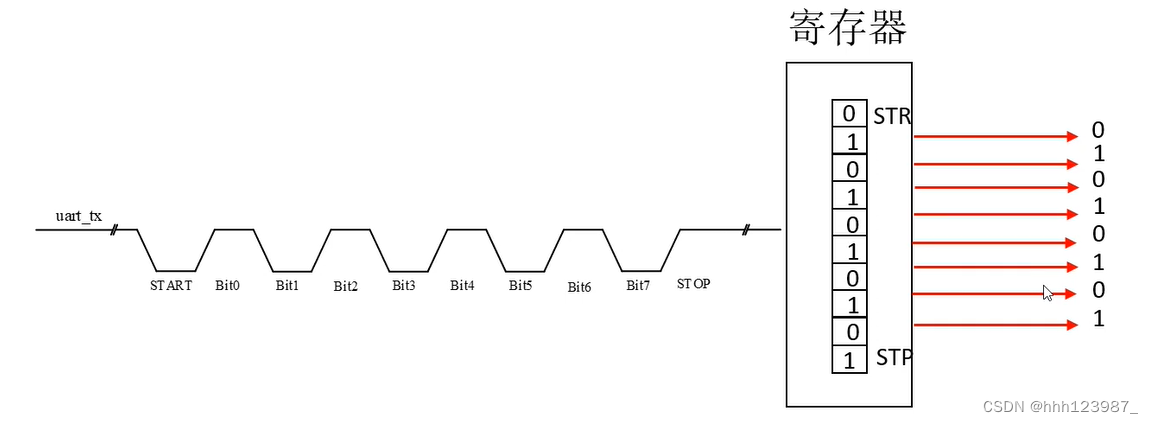
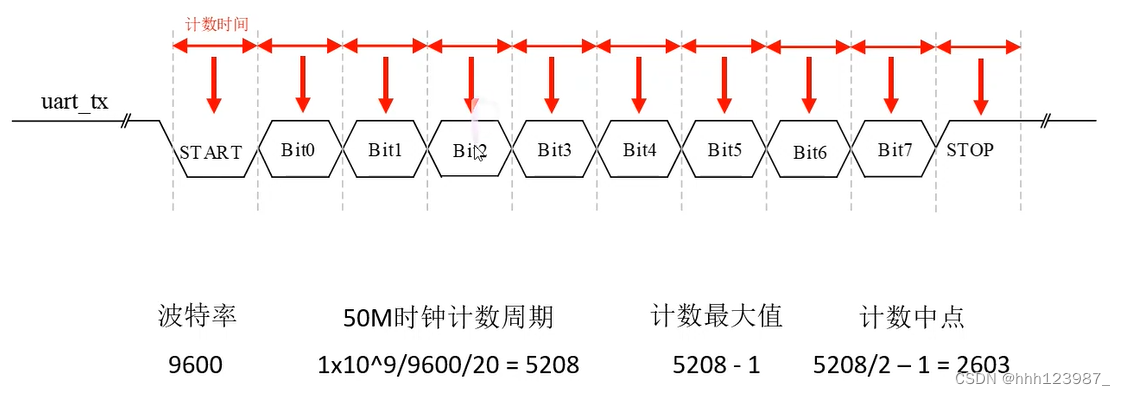
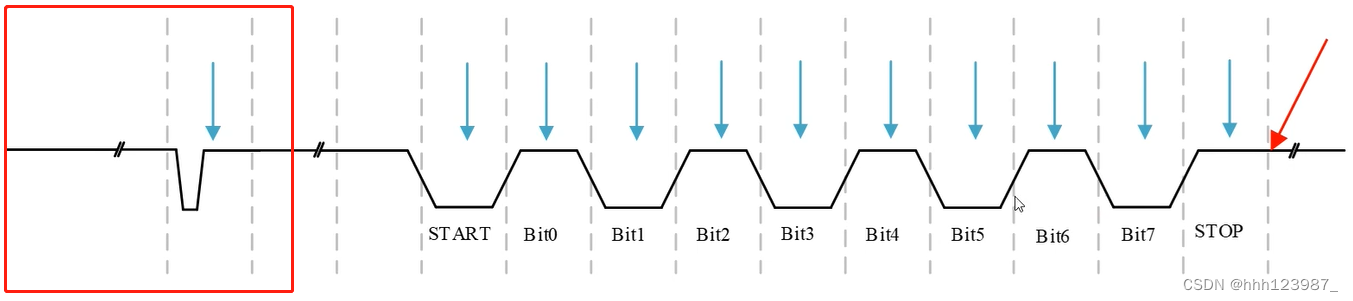
| Q1: 如何从串行数据准确的接收每一位数据? 取计数中点 |
 |
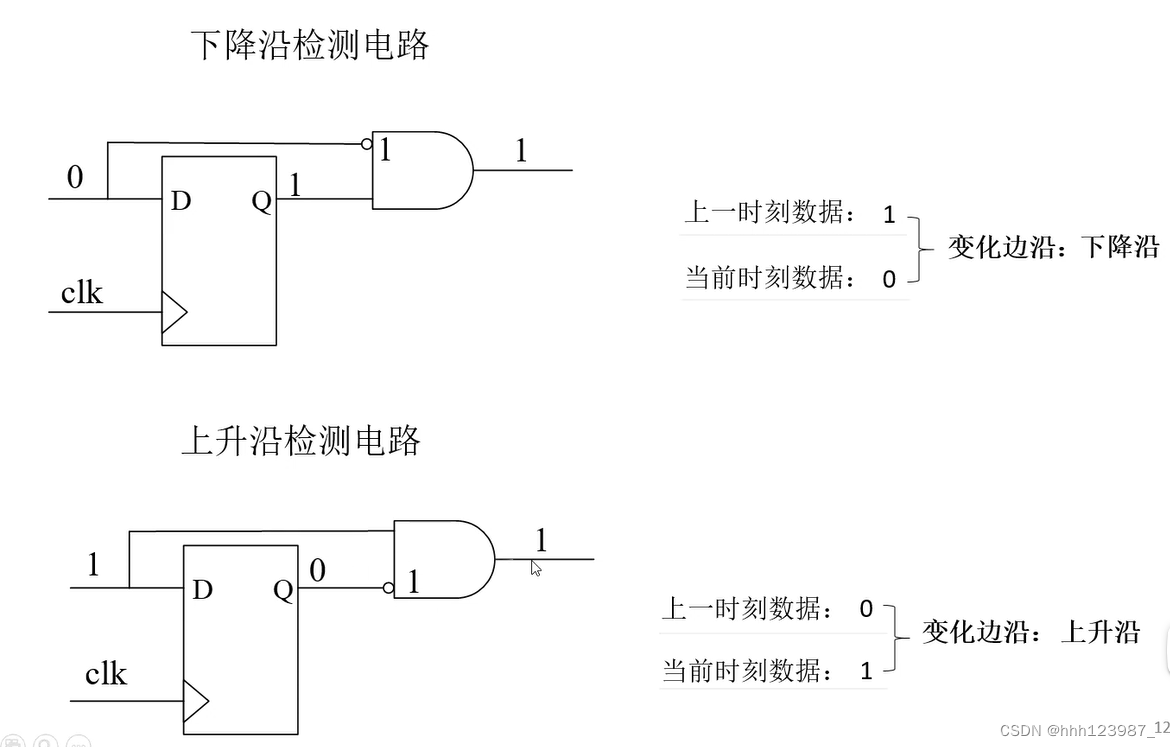
| Q2: 如何检测起始位的下降沿 ? 下降沿检测电路 
|
| 
|
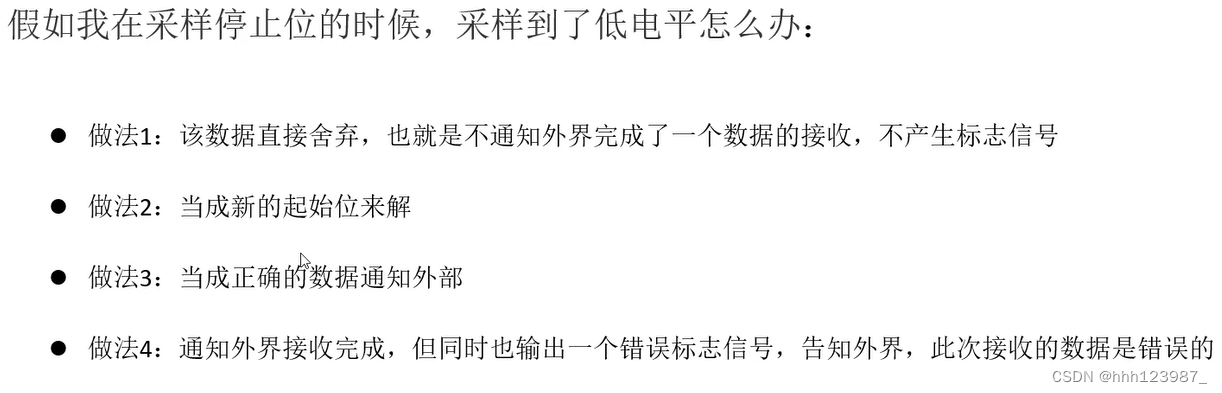
| Q3: 波特率分频计数器使能逻辑 对于毛刺信号的处理 |
| 
|
| Q4: 判断当前信号是第几位? 使用位计数器 |
 |
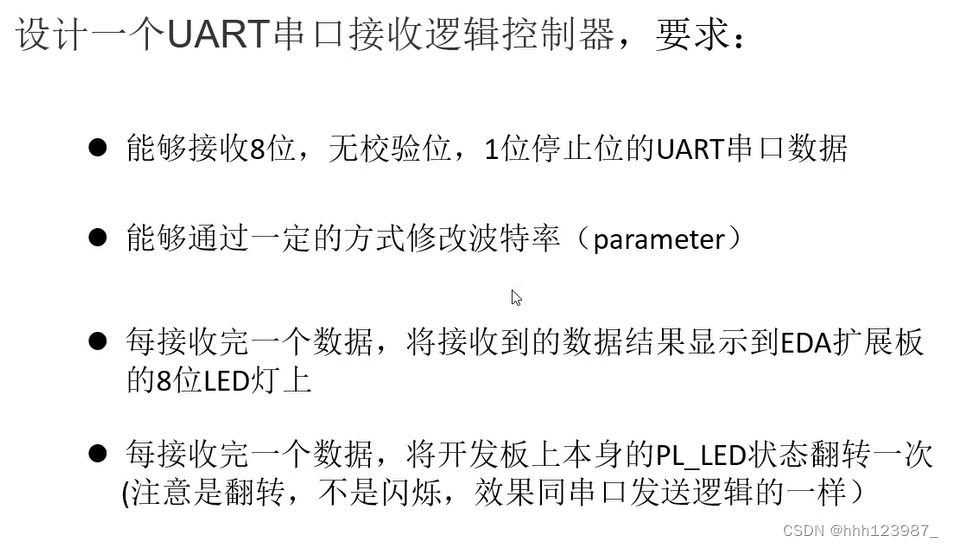
2. 今日摸鱼任务 ๑乛v乛๑ 完成串口接收仿真
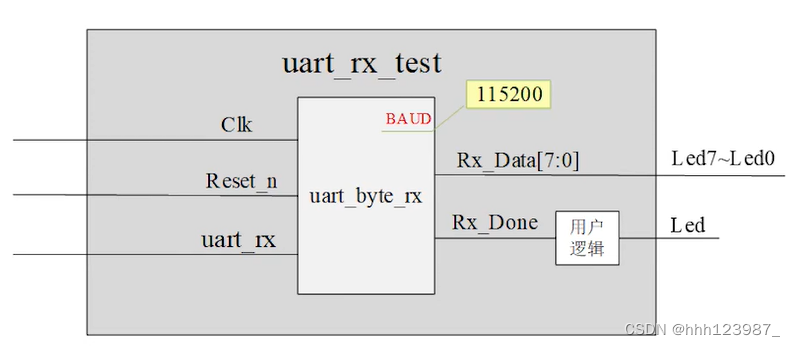
3. uart_rx
3.1 design sources
| module uart_rx_1(input clk ,
input reset_n ,
input uart_rx ,
output reg [7:0]rx_data,
output reg rx_done );
// bps
// neg_rx_go 避免亚稳态的影响,采用如下电路
关于亚稳态亚稳态浅浅学习 ( ੭ ˙ᗜ˙ )੭-CSDN博客 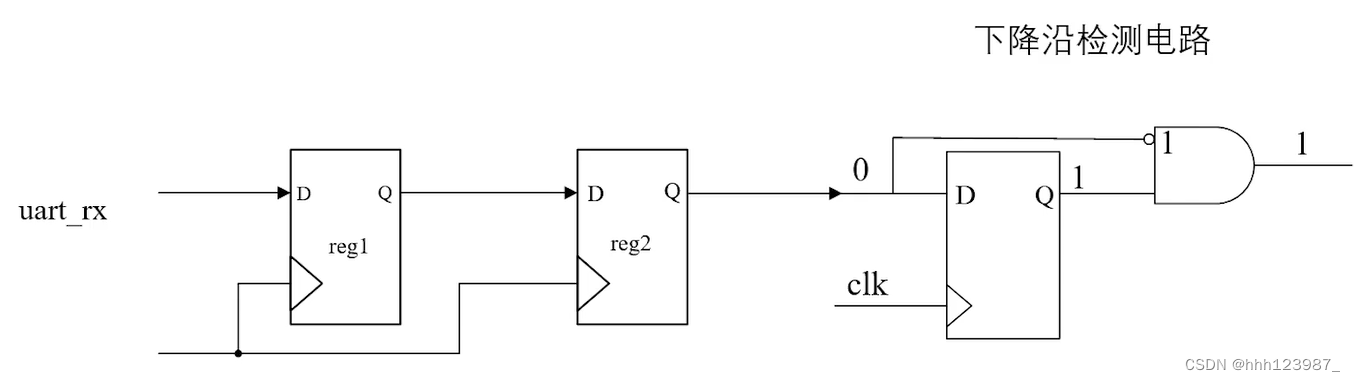
// rx_en
// rx_flag
// [7:0]rx_data
// rx_done
endmodule
|
| module uart_rx_1(input clk ,
input reset_n ,
input uart_rx ,
output reg [7:0]rx_data,
output reg rx_done );
//默认使用波特率BAUD 9600 时钟频率 CLK_FREQ 50MHz
// parameter start_bit = 0 ;
// parameter stop_bit = 1 ;
parameter BAUD = 9600;
parameter CLK_FREQ = 50_000_000;
parameter bps_c = CLK_FREQ / BAUD ;
reg rx_en ;
reg[3:0] rx_flag;
// bps
reg [30:0] counter_bps ;
always@(posedge clk or negedge reset_n)
if(! reset_n)
counter_bps <= 0 ;
else if (rx_en)
if(counter_bps == bps_c - 1)
counter_bps <= 0 ;
else
counter_bps <= counter_bps + 1'b1 ;
else
counter_bps <= 0 ;
reg dff_rx_0 , dff_rx_1 ;
reg r_uart_rx;
wire neg_rx_go ;
always@(posedge clk )
dff_rx_0 <= uart_rx ;
always@(posedge clk )
dff_rx_1 <= dff_rx_0 ;
always@(posedge clk )
r_uart_rx <= dff_rx_1 ;
assign neg_rx_go = (dff_rx_1 == 0)&&(r_uart_rx == 1);
// rx_en
always@(posedge clk or negedge reset_n)
if(! reset_n)
rx_en <= 0 ;
else if(neg_rx_go)
rx_en <= 1 ;
else if((rx_flag==9)&&(counter_bps == bps_c - 1))
rx_en <= 0 ;
else if((rx_flag==0)&&(counter_bps == bps_c/2 )&&(dff_rx_1==1)) //处理毛刺信号
rx_en <= 0 ;
// rx_flag
always@(posedge clk or negedge reset_n)
if(!reset_n) rx_flag <= 4'b0000 ; //调试发现rx_flag一直为0,结果问题出在没写!
else if(counter_bps == bps_c - 1)
begin
if(rx_flag == 9)
rx_flag <= 0 ;
else
rx_flag <= rx_flag + 1'b1 ;
end
//注意这里后边有修改
// [7:0]rx_data
always@(posedge clk )
if(!rx_en) rx_data <= rx_data;
else if(counter_bps == bps_c / 2) //取计数中点
begin
case(rx_flag)
1 : rx_data[0] <= dff_rx_1;
2 : rx_data[1] <= dff_rx_1;
3 : rx_data[2] <= dff_rx_1;
4 : rx_data[3] <= dff_rx_1;
5 : rx_data[4] <= dff_rx_1;
6 : rx_data[5] <= dff_rx_1;
7 : rx_data[6] <= dff_rx_1;
8 : rx_data[7] <= dff_rx_1;
default : rx_data <= rx_data;
endcase
end
// rx_done
always@(posedge clk)
rx_done <= (rx_flag==9)&&(counter_bps == bps_c - 1);
endmodule
|
3.2 uart_rx_text_tb
`timescale 1ns / 1ns
module uart_rx_tb();
reg clk , reset_n ;
reg uart_rx;
wire [7:0]rx_data;
wire rx_done;
uart_rx_1 uart_rx_tb_( .clk(clk) ,
.reset_n(reset_n) ,
.uart_rx(uart_rx) ,
.rx_data(rx_data),
.rx_done(rx_done) );
initial clk = 1 ;
always #10 clk = ~clk ;
initial
begin
reset_n = 0 ;
uart_rx = 1 ;
#201;
reset_n = 1 ; #2000;
// 0F 0000_1111
uart_rx = 0 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
#200000;
// 55 0101_0101
uart_rx = 0 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
uart_rx = 0 ; #(5208*20);
uart_rx = 1 ; #(5208*20);
#200000;
$stop;
end
endmodule
|
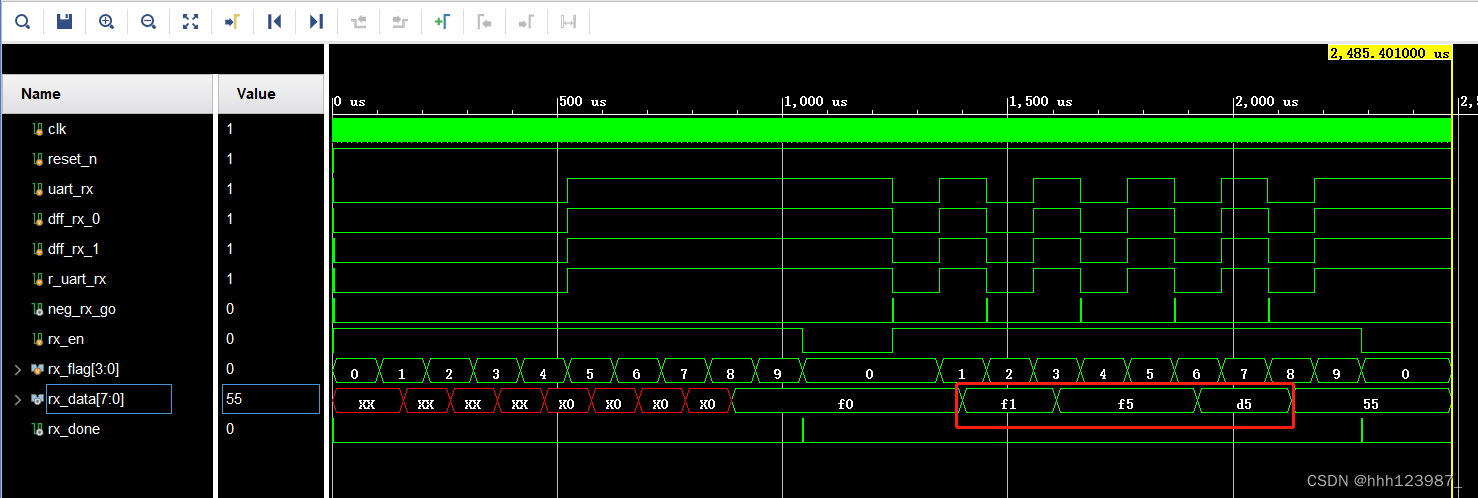 |
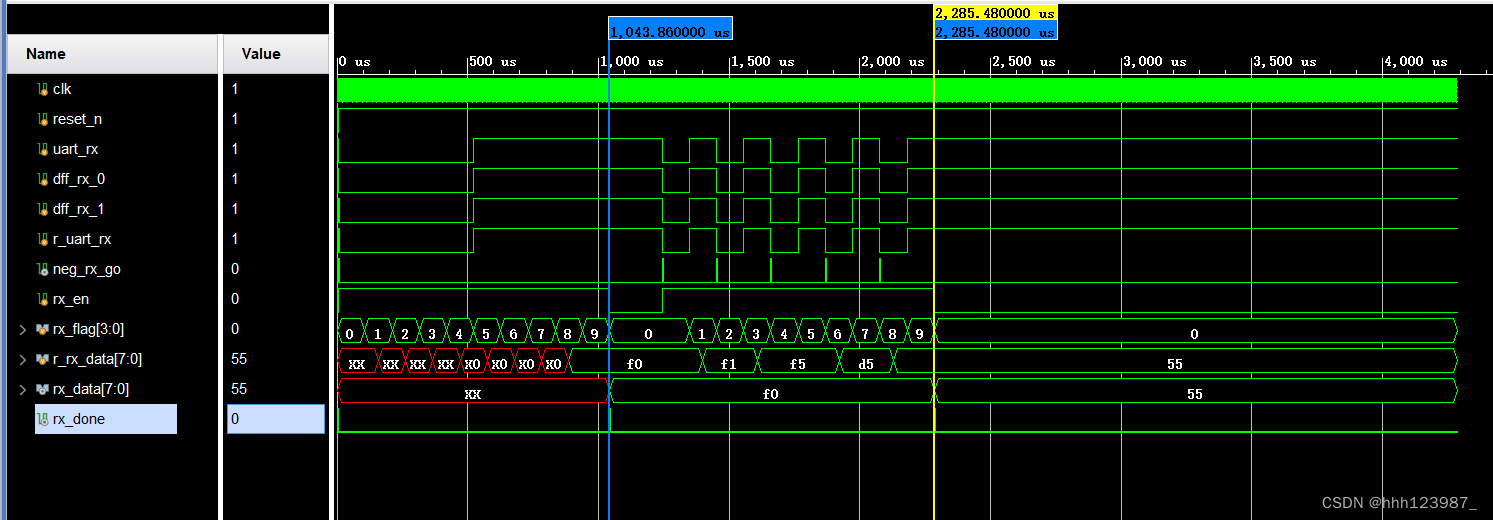
红框部分表示输出rx_data会在传送过程中有变化,同串口发送,设置锁存data
3.3 设置 r_rx_data 后 design sources
| module uart_rx_1(input clk ,
input reset_n ,
input uart_rx ,
output reg [7:0]rx_data,
output reg rx_done );
//默认使用波特率BAUD 9600 时钟频率 CLK_FREQ 50MHz
// parameter start_bit = 0 ;
// parameter stop_bit = 1 ;
parameter BAUD = 9600;
parameter CLK_FREQ = 50_000_000;
parameter bps_c = CLK_FREQ / BAUD ;
reg rx_en ;
reg[3:0] rx_flag;
// bps
reg [30:0] counter_bps ;
always@(posedge clk or negedge reset_n)
if(! reset_n)
counter_bps <= 0 ;
else if (rx_en)
if(counter_bps == bps_c - 1)
counter_bps <= 0 ;
else
counter_bps <= counter_bps + 1'b1 ;
else
counter_bps <= 0 ;
reg dff_rx_0 , dff_rx_1 ;
reg r_uart_rx;
wire neg_rx_go ;
always@(posedge clk )
dff_rx_0 <= uart_rx ;
always@(posedge clk )
dff_rx_1 <= dff_rx_0 ;
always@(posedge clk )
r_uart_rx <= dff_rx_1 ;
assign neg_rx_go = (dff_rx_1 == 0)&&(r_uart_rx == 1);
// rx_en
always@(posedge clk or negedge reset_n)
if(! reset_n)
rx_en <= 0 ;
else if(neg_rx_go)
rx_en <= 1 ;
else if((rx_flag==9)&&(counter_bps == bps_c - 1))
rx_en <= 0 ;
else if((rx_flag==0)&&(counter_bps == bps_c/2 )&&(dff_rx_1==1))
rx_en <= 0 ;
// rx_flag
always@(posedge clk or negedge reset_n)
if(!reset_n) rx_flag <= 4'b0000 ;
else if(counter_bps == bps_c - 1)
begin
if(rx_flag == 9)
rx_flag <= 0 ;
else
rx_flag <= rx_flag + 1'b1 ;
end
// [7:0]r_rx_data
reg [7:0] r_rx_data;
always@(posedge clk )
if(!rx_en) r_rx_data <= r_rx_data;
else if(counter_bps == bps_c / 2)
begin
case(rx_flag)
1 : r_rx_data[0] <= dff_rx_1;
2 : r_rx_data[1] <= dff_rx_1;
3 : r_rx_data[2] <= dff_rx_1;
4 : r_rx_data[3] <= dff_rx_1;
5 : r_rx_data[4] <= dff_rx_1;
6 : r_rx_data[5] <= dff_rx_1;
7 : r_rx_data[6] <= dff_rx_1;
8 : r_rx_data[7] <= dff_rx_1;
default : r_rx_data <= r_rx_data;
endcase
end
// rx_done
always@(posedge clk)
rx_done <= (rx_flag==9)&&(counter_bps == bps_c - 1);
// rx_data ;
always@(posedge clk)
if(rx_done) rx_data <= r_rx_data;
endmodule
|
//嘎嘎嘎~~~~~
//好啦,摸鱼结束哩 ๑乛v乛๑
//下一次完成摸鱼任务白白~

























 1069
1069











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









