






永磁同步电机滑模观测器无位置传感器矢量控制算法仿真模型,PMSM的SMO算法,其中SMO用到锁相环,并且相对传统算法改进使用了符号函数,利用matlab/simulink搭建,以供参考学习
ID:62100679133660331
阳光彩虹小彪马

永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为一种高性能电机,在工业应用中得到了广泛的应用。然而,传统的控制方法往往需要依赖位置传感器来获取电机的转子位置信息,这不仅增加了系统的复杂性和成本,还可能引入传感器的误差和故障。为解决这一问题,研究人员提出了一种基于滑模观测器(Sliding Mode Observer,SMO)的无位置传感器矢量控制算法,用于实现对PMSM的高效控制。
在传统的矢量控制算法中,通过测量电机的转子位置,并结合反馈控制器来实现电机的精确控制。然而,这种传统方法所需的位置传感器不仅增加了系统的复杂性和成本,而且可能引入传感器的误差和故障。为了解决这一问题,研究人员提出了一种基于滑模观测器的无位置传感器矢量控制算法。
滑模观测器是一种基于滑模控制理论的观测器,它通过引入滑模面来实现对系统状态的估计。在PMSM的无位置传感器矢量控制算法中,滑模观测器被应用于估计电机转子位置和速度,从而实现对电机的控制。其中,锁相环(Phase-Locked Loop,PLL)被用来提供电机转子位置的初值,并通过滑模观测器对其进行细化和修正。同时,相对于传统算法,该算法改进了符号函数的使用,提高了控制系统的稳定性和性能。
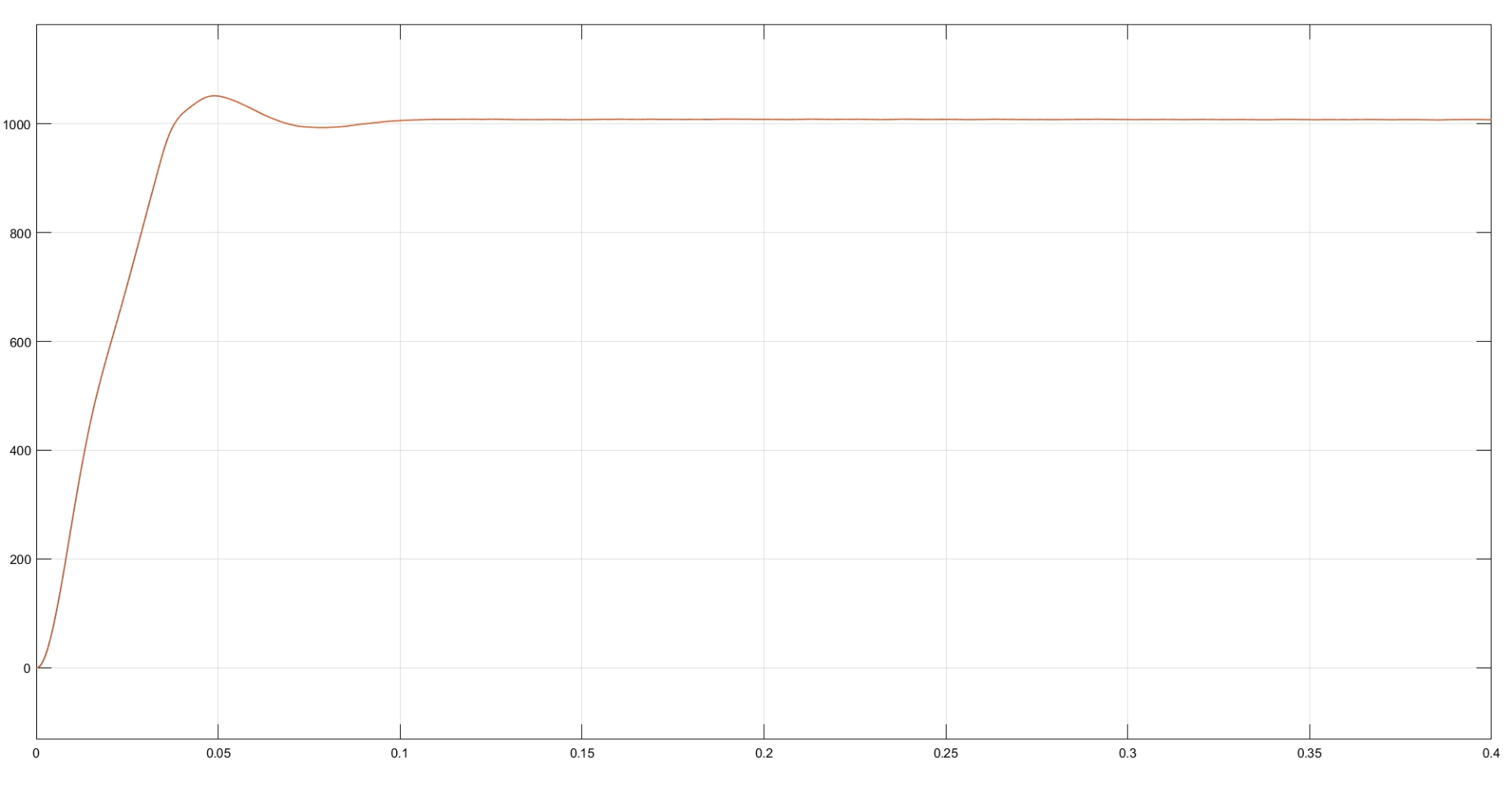
为了验证无位置传感器矢量控制算法的有效性,本文使用matlab simulink搭建了相应的仿真模型。通过设置不同的工况和参数,对比传统算法和无位置传感器矢量控制算法在转速跟踪性能、鲁棒性和饱和特性等方面的差异。仿真结果表明,无位置传感器矢量控制算法在提高控制精度、减小电机转矩脉动和防止转速超调等方面相对于传统算法具有明显的优势。
在工业应用中,无位置传感器矢量控制算法可以有效地降低系统的复杂性和成本,提高系统的可靠性和稳定性。然而,该算法在实际应用中还存在一些问题,例如对电机参数的依赖性和对PLL初始值的敏感性等。因此,还需要进一步的研究和改进,以提高无位置传感器矢量控制算法在实际工程中的应用价值。
综上所述,基于滑模观测器的无位置传感器矢量控制算法为PMSM的控制提供了一种新的思路和方法。通过引入滑模观测器和锁相环,该算法实现了对PMSM的高效控制,并在仿真模型中得到了验证。未来,我们将继续深入研究和改进该算法,以进一步提高其在实际工程中的应用性能和可靠性。
相关的代码,程序地址如下:http://matup.cn/679133660331.html
















 286
286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









