







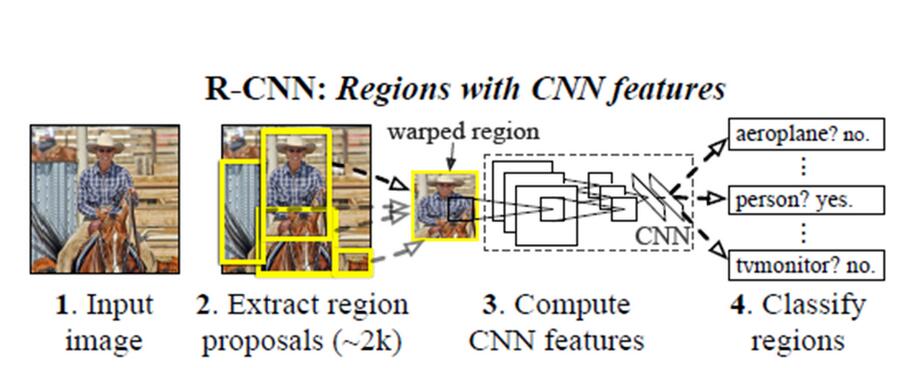
rcnn
处理框架:
1.输入图像
2.提取候选区域(基于selective search方法)
3.候选区域送入CNN,计算得到每个候选区域的特征向量
4.使用支持向量机进行分类
5.边界框回归(boundingbox regression)
spp(spatial pyramid pooling) net
1.输入图像
2.提取候选区域(基于selective search方法)
3.只对原图进行CNN,把2中得到的候选区域映射到feature map 上,得到候选区域的特征向量。(只不过这里对映射后的候选区域feature进行了金字塔多尺度池化,spatial pyramid pooling)
4.池化结果输入到全连接层
5.边界框回归
spp net相对于rcnn的改进之处在于,只对输入图像进行了CNN,然后将proposal映射到feature map 上,得到对应的卷积特征向量。而不是rcnn那样对每个proposal都进行CNN
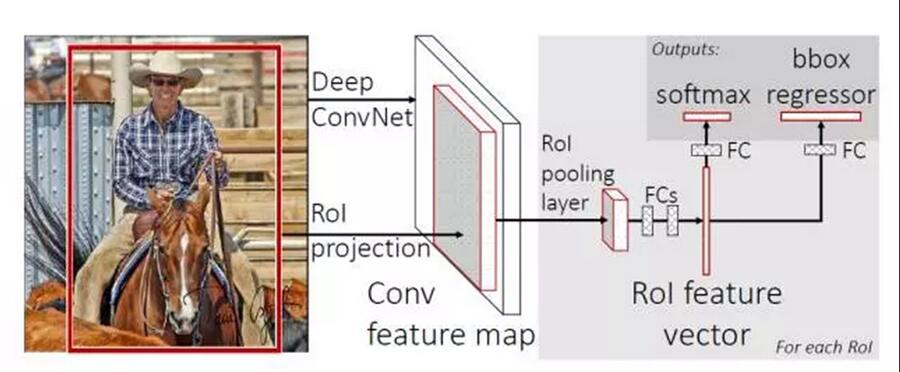
fast rcnn
1.输入图像
2.提取候选区域(基于selective search方法)
3.只对原图进行CNN,把2中得到的候选区域映射到feature map 上,得到候选区域的特征向量。(只不过这里对映射后的候选区域feature进行了金字塔多尺度池化)
4.池化结果输入到全连接层
5.使用多任务损失函数,将边框回归直接加入到CNN网络中训练

















 883
883

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









