






这一篇介绍提取HOG描述子的函数。
函数/Functions
函数名称:extractHOGFeatures
功能:提取HOG描述子
语法:features = extractHOGFeatures(I);
[features,validPoints] = extractHOGFeatures(I,Points);
[_,visualization] = extractHOGFeatures(I,_);
[_] = extractHOGFeatures(_,Name,Value);
其中,I为3-D彩色图像或2-D灰度图像,features为1xN的HOG描述子向量,N为描述子的长度,该描述子是输入图像区域的局部形状信息编码。当指定Points(同extractFeatures函数输入Points)时,则获取指定点附近的HOG描述子,visualization表示可用于任何可视化的函数的输入参数,例如plot(visualization),Name为用一对单引号包含的字符串,Value为对应Name的值。
| Name | Value |
|---|---|
| 'CellSize' | HOG单元(HOG cell)大小,默认值为[8,8],为捕获大尺度空间信息,可以增加‘CellSize'的取值 |
| ’BlockSize' | 块中单元的大小,默认值为[2,2],当取值较大时将降低抑制局部亮度变化的能力,当取值较小时,能够抑制亮度变化 |
| ‘BlockOverlap' | 相邻块(block)之间的重叠HOG单元的个数,默认值为ceil(BlockSize/2),该参数只在从区域(region)获取HOG特征时有用。 |
| ’NumBins' | 方向直方图分段(orientation histogram bins)的数目,默认值为9,必须为正整数,如果想要获取精细的方向信息,该值可以设置大一些,但是将增加处理时间和HOG特征长度 |
| ‘UseSignedOrienation' | 默认值为false,当该值置为true时,方向直方图中所取方向的范围为[-180,180],若置为false,方向的取值范围为[0,180],此时,方向角度小于0的将统计如+180bins中,利用带符号的方向,可以区分区域中从light-to-dark和dark-to-light |
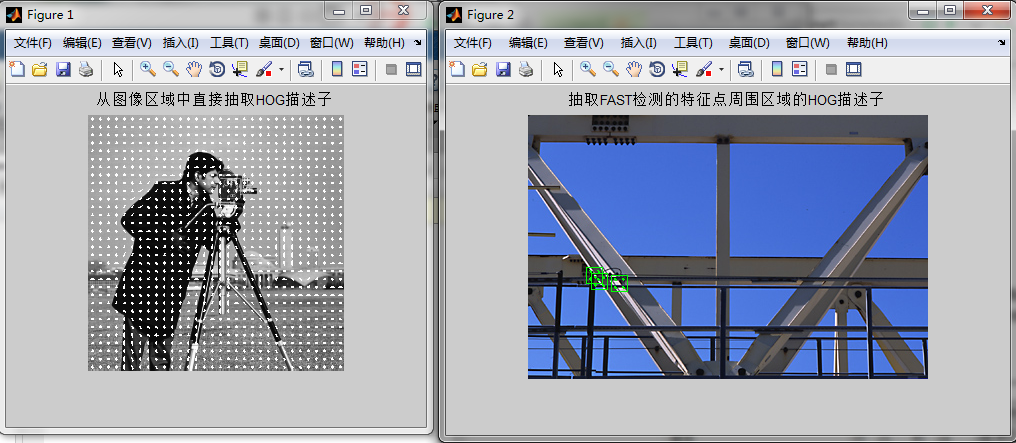
举例:
close all;
clear all;
clc;
Img = imread('cameraman.tif');
[featureVector,hogVisualization] = extractHOGFeatures(Img);
figure;
imshow(Img); hold on;
plot(hogVisualization);
title('从图像区域中直接抽取HOG描述子');
clear Img;
clear featureVector;
Img = imread('gantrycrane.png');
CornersPoints = detectFASTFeatures(rgb2gray(Img));
strongest = selectStrongest(CornersPoints,3); %选择前三个
[featureVector,validPoints,hogVisualization] = extractHOGFeatures(Img,strongest);
figure;
imshow(Img); hold on;
plot(hogVisualization,'Color','green');
title('抽取FAST检测的特征点周围区域的HOG描述子');
clear Img;
clear featureVector;















 962
962

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









