







http://blog.csdn.net/tong646591/article/details/8301925
定义:字符设备的一种,它们共享一个主设备号(10),但次设备号不同,所有的混杂设备形成一个链表,对设备访问时内核根据次设备号查找到相应的miscdevice设备。
例如:触摸屏,LED,按键,串口。
即:为了节约主设备号,将某些设备用链表的形式连接在一起,最后通过查找次设备区分。这里用主设备无法匹配出设备驱动,只能找到链表,再通过次设备号,才能找到设备驱动。而之前所学的,一般字符设备,通过主设备号,就能找到设备驱动了。
混杂设备驱动内置有自动创建设备节点的代码,所以编译好之后,能自动创建设备节点。
相关的宏,定义在 kernel/include/Linux/miscdevice.h
杂项设备的核心函数的定义位于:kernel/drivers/char/misc.c
创建自动设备节点相关代码
"kernel/drivers/base/core.c"
struct device *device_create(struct class *class, struct device *parent, dev_t devt, void *drvdata, const char *fmt, ...)
{
va_list vargs;
struct device *dev;
va_start(vargs, fmt);
dev = device_create_vargs(class, parent, devt, drvdata, fmt, vargs);
va_end(vargs);
return dev;
}
EXPORT_SYMBOL_GPL(device_create);
static int __match_devt(struct device *dev, void *data)
{
dev_t *devt = data;
return dev->devt == *devt;
}
/**
* device_destroy - removes a device that was created with device_create()
* @class: pointer to the struct class that this device was registered with
* @devt: the dev_t of the device that was previously registered
*
* This call unregisters and cleans up a device that was created with a
* call to device_create().
*/
void device_destroy(struct class *class, dev_t devt)
{
struct device *dev;
dev = class_find_device(class, NULL, &devt, __match_devt);
if (dev) {
put_device(dev);
device_unregister(dev);
}
}
EXPORT_SYMBOL_GPL(device_destroy);
写miscdevice的驱动模块
http://www.cnblogs.com/snake-hand/p/3212483.html
对于linux的驱动程序来说,主要分为三种:miscdevice、platform_device、platform_driver 。
这三个结构体关系:
(基类)
kobject --------------------
/ \ \
/ \ \
device cdev driver
/ \ (设备驱动操作方法) \
/ \ \
miscdevice platform_device platform_driver
(设备驱动操作方法) (设备的资源) (设备驱动)
这时,我们先不讨论这几个间的关系与驱别,对于新手来说,上手最重要!
首先我们先看看混杂项:
在Linux驱动中把无法归类的五花八门的设备定义为混杂设备(用miscdevice结构体表述)。miscdevice共享一个主设备号MISC_MAJOR(即10),但次设备号不同。 所有的miscdevice设备形成了一个链表,对设备访问时内核根据次设备号查找对应的miscdevice设备,然后调用其file_operations结构中注册的文件操作接口进行操作。 在内核中用struct miscdevice表示miscdevice设备,然后调用其file_operations结构中注册的文件操作接口进行操作。miscdevice的API实现在drivers/char/misc.c中。
第二,我们再看看混杂项设备驱动的程序组织架构:
新建一个first_led.c,先可能用到的头文件都引用上吧!
#include <linux/kernel.h>
#include <linux/module.h>//驱动模块必需要加的个头文件
#include <linux/miscdevice.h>
#include <linux/fs.h>
#include <linux/types.h>
#include <linux/moduleparam.h>
#include <linux/slab.h>
#include <linux/ioctl.h>
#include <linux/cdev.h>
#include <linux/delay.h>.
//对应着相应机器平台的头文件
#include <mach/gpio.h>
#include <mach/regs-gpio.h>
#include <plat/gpio-cfg.h>
//给自己设备驱动定义一个名字
#define DEVICE_NAME "First_led"
名字有了,但样子是怎样的呢?现在就开始定义一个“样子”!
如果一个字符设备驱动要驱动多个设备,那么它就不应该用misc设备来实现。
通常情况下,一个字符设备都不得不在初始化的过程中进行下面的步骤:
通过alloc_chrdev_region()分配主次设备号。
使用cdev_init()和cdev_add()来以一个字符设备注册自己。
而一个misc驱动,则可以只用一个调用misc_register()来完成这所有的步骤。
(所以miscdevice是一种特殊的chrdev字符设备驱动)
所有的miscdevice设备形成一个链表,对设备访问时,内核根据次设备号查找
对应的miscdevice设备,然后调用其file_operations中注册的文件操作方法进行操作。
在Linux内核中,使用struct miscdevice来表示miscdevice。这个结构体的定义为:
struct miscdevice
{
int minor;
const char *name;
const struct file_operations *fops;
struct list_head list;
struct device *parent;
struct device *this_device;
const char *nodename;
mode_t mode;
};
minor是这个混杂设备的次设备号,若由系统自动配置,则可以设置为
MISC_DYNANIC_MINOR,name是设备名
为了容易理解,我们先打大概的“样子”做好。只做minor、name、fops;
定义一个myfirst_led_dev设备:
static struct miscdevice myfirst_led_dev = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &myfirst_led_dev_fops,
};Minor name 都已经定义好了。那么接下来实现一下myfirst_led_dev_fops方法。
内核中关于file_operations的结构体如下:
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
int (*readdir) (struct file *, void *, filldir_t);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
};
对于LED的操作,只需要简单实现io操作就可以了,所以只实现
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
(该函数是在linux2.6.5以后才出现在设备的操作方法中的。)
函数参数为文件节点、命令、参数
static struct file_operations myfirst_led_dev_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = myfirst_led_ioctl,
};
到了这里,我们就考虑一下LED的物理层面是怎样的实现了,通过开发板的引脚我们可以知道,四个LED是分别接到了GPJ2的0~3号管脚上。因此,我们定义一个数组来引用这几个管脚(当然不能像祼机那样对IO的物理地址进行操作了,是需要经过内核的内存映射得来的IO内存操作!而内核把ARM的IO管脚地址按一个线性地址进行了编排)
static int led_gpios[] = {
S5PV210_GPJ2(0),
S5PV210_GPJ2(1),
S5PV210_GPJ2(2),
S5PV210_GPJ2(3),
};
#define LED_NUM ARRAY_SIZE(led_gpios)//判断led_gpio有多少个
S5PV210_GPJ2(*)的定义如下
#define S5PV210_GPJ2(_nr) (S5PV210_GPIO_J2_START + (_nr))
|
|
|
enum s5p_gpio_number {
S5PV210_GPIO_A0_START = 0,
...................................
S5PV210_GPIO_J2_START = S5PV210_GPIO_NEXT(S5PV210_GPIO_J1),
.....................................
}
|
|
|
#define S5PV210_GPIO_NEXT(__gpio) \
((__gpio##_START) + (__gpio##_NR) + CONFIG_S3C_GPIO_SPACE + 1)
(注:##是粘贴运算,具体用法请自行找度娘或谷哥)
给用户空间的接口操作:
static long myfirst_led_ioctl(struct file *filp, unsigned int cmd,
unsigned long arg)
{
switch(cmd) {
case 0:
case 1:
if (arg > LED_NUM) {
return -EINVAL;//判读用户的参数是否有误
}
gpio_set_value(led_gpios[arg], !cmd);//用户选定的LED并设置值
//printk(DEVICE_NAME": %d %d\n", arg, cmd);
break;
default:
return -EINVAL;
}
return 0;
}
对于gpio_set_value(unsigned int gpio, int value),内核有以下定义:
static inline void gpio_set_value(unsigned int gpio, int value)
{
__gpio_set_value(gpio, value);
}
|
|
|
void __gpio_set_value(unsigned gpio, int value)
{
struct gpio_chip *chip;
chip = gpio_to_chip(gpio);
WARN_ON(chip->can_sleep);
trace_gpio_value(gpio, 0, value);
chip->set(chip, gpio - chip->base, value);
}//到这里我们就不再分析下去了 ,无非就是判定是哪一个芯片
程序写到这里,对于用户空间来说,已经有了完整的操作方法接口,但对于内核模块来说,还缺少驱动模块的进入与退出。以下接着写驱动模块的初始化(即进入)和退出。
static int __init myfirst_led_dev_init(void) {;}
static void __exit myfirst_led_dev_exit(void) {;}
函数如上。双下划线表示模块在内核启动和关闭时自动运行和退出
对于驱动模块的初始化函数,要写些什么呢?我们这样考虑:
对于用户空间接口来说,我们的实现函数只是给出了IO的值设置的,但是ARM的IO管脚使用还是需要配置方向、上拉下拉.....才能正常使用的,并且所有的硬件资源,都是受内核所支配的,驱动程序必需向内核申请硬件资源才能对硬件进行操作。另外还需要对设备进行注册,内核才知道你这个设备是什么东东,用到哪些东西。这些操作,我们安排在init里实现!
static int __init myfirst_led_dev_init(void)
{
int ret;
int i;
for (i = 0; i < LED_NUM; i++)
{
ret = gpio_request(led_gpios[i], "LED");//申请IO引脚
if (ret) {
printk("%s: request GPIO %d for LED failed, ret = %d\n", DEVICE_NAME,
led_gpios[i], ret);
return ret;
}
s3c_gpio_cfgpin(led_gpios[i], S3C_GPIO_OUTPUT);
gpio_set_value(led_gpios[i], 1);
}
ret = misc_register(&myfirst_led_dev);
printk(DEVICE_NAME"\tinitialized\n");
return ret;
}
gpio_request(unsigned gpio, const char *label)
gpio则为你要申请的哪一个管脚,label为其名字 。
int s3c_gpio_cfgpin(unsigned int pin, unsigned int config);
对芯片进行判断,并设置引脚的方向。
ret = misc_register(&myfirst_led_dev);.
该函数中、内核会自动为你的设备创建一个设备节点
对设备进行注册
到这里,设备的初始化与注册已经完成!
当用户不再需要该驱动资源时,我们必需在驱动模块中,对占用内核的资源进行主动的释放!
因此在驱动模块退出时,完成这些工作!
static void __exit myfirst_led_dev_exit(void) {
int i;
for (i = 0; i < LED_NUM; i++) {
gpio_free(led_gpios[i]);
}
misc_deregister(&myfirst_led_dev);
}gpio_free(led_gpios[i]);
释放IO资源
misc_deregister(&myfirst_led_dev);
注销设备
还需要模块的初始化与退出函数声明
module_init(myfirst_led_dev_init);
module_exit(myfirst_led_dev_init);
最后,为了保持内核驱动模块的风格,我们还要加上相应的许可跟作者
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jjvip136@163.com");
好了,程序已经打好出来了(黄色代码),我们把它整理好,试下编译一下试试效果(晚点补上效果)。
http://blog.csdn.net/Tony_Shen/article/details/52536396
硬件环境
开发板:nanopi2 (cpu:A9 s5p4418 )
软件环境
内核版本: linux3.4.39
交叉编译器:arm-Linux-gcc version 4.9.3 (ctng-1.21.0-229g-FA) 64位系统版本
Linux3.4内核GPIO驱动说明
Kernel 2.6.32版本以上提供了gpio口管理的库文件/kernel/drivers/gpio/gpiolib.c。
相关的接口:
1.int gpio_request(unsigned gpio, const char *label)
申请一个pin脚作为gpio口,命名为 * label,如果经过判断空闲的 申请成功了做一些初始的bit位设置。
2.void gpio_free(unsigned gpio)
释放这个gpio口
3.int gpio_direction_input(unsigned gpio)
设置gpio口为输入模式
4.int gpio_direction_output(unsigned gpio, int value)
设置gpio口为输出模式 value为初始值 0为高电平/1为低电平
5.void __gpio_set_value(unsigned gpio, int value)
设置gpio口的值
6.int __gpio_get_value(unsigned gpio)
获取gpio口的值- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
底层芯片具体实现
在drivers/gpio下实现了通用的基于gpiolib的GPIO驱动,其中定义了一个通用的用于描述底层GPIO控制器的gpio_chip结构体,并要求具体的SoC实现gpio_chip结构体的成员函数,最后透过gpiochip_add()注册gpio_chip。- 1
- 1
驱动程序源码
#include <linux/module.h>
#include <linux/gpio.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/moduleparam.h>
#include <linux/init.h>
#include <linux/hrtimer.h>
#include <linux/ktime.h>
#include <linux/device.h>
#include <linux/kdev_t.h>
#include <linux/interrupt.h>
#include <linux/sched.h>
#include <linux/miscdevice.h>
#include <mach/platform.h>
#include <mach/devices.h>
#define DEVICE_NAME "4418_relay"
//nanopi2 4418
unsigned int J1_GPIO = PAD_GPIO_C + 11;//模块GPIO脚
unsigned int J2_GPIO = PAD_GPIO_C + 12;//模块GPIO脚
#define J1_OFF 0x00
#define J1_ON 0x01
#define J2_OFF 0x10
#define J2_ON 0x11
char drv_buf[2];
static int update_relay(void)
{
switch(drv_buf[0]) {
case J1_ON:
gpio_set_value(J1_GPIO, 0); //输出低电平
return 0;
case J1_OFF:
gpio_set_value(J1_GPIO, 1); //输出高电平
return 0;
case J2_ON:
gpio_set_value(J2_GPIO, 0); //输出低电平
return 0;
case J2_OFF:
gpio_set_value(J2_GPIO, 1); //输出高电平
return 0;
default:
return -EINVAL;
}
}
static int relay_write(struct file *file, const char * buffer, size_t count, loff_t * ppos)
{
unsigned long err;
err = copy_from_user(drv_buf, buffer, 1);
update_relay();
return 1;
}
static struct file_operations dev_fops={
write:relay_write,
};
static struct miscdevice misc = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &dev_fops,
};
static int __init my_relay_init(void)
{
int ret;
gpio_direction_output(J1_GPIO, 1);//设置输出
gpio_direction_output(J2_GPIO, 1);//设置输出
ret = misc_register(&misc);
printk (DEVICE_NAME"\t#NanoPi2 J1 J2 initialized\n");
return ret;
}
static void __exit my_relay_exit(void)
{
misc_deregister(&misc);
}
module_init(my_relay_init);
module_exit(my_relay_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("TONY");
MODULE_DESCRIPTION("91arm.com Relay Driver");
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
修改内核配置菜单,增加当前驱动配置。
内核模块编译
make CROSS_COMPILE=arm-linux- modules- 1
- 1
内核模块不能加载问题
insmod 加载出现如下问题
root@nanopi2:/home/fa# insmod 4418_relay.ko
insmod: ERROR: could not insert module 4418_relay.ko: Invalid module format
- 1
- 2
- 3
- 1
- 2
- 3
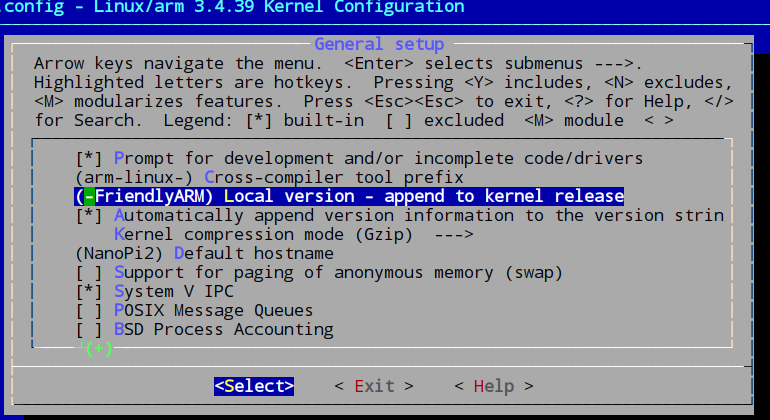
查看错误信息,version magic驱动程序同开发板内核不匹配。
root@nanopi2:/home/fa# dmesg |tail
[ 2589.164000] 4418_relay: version magic '3.4.39-s5p4418 SMP preempt mod_unload ARMv7 p2v8 ' should be '3.4.39-FriendlyARM SMP preempt mod_unload ARMv7 p2v8 '- 1
- 2
- 3
- 1
- 2
- 3
修改内核版本信息,-s5p4418改成内核的FriendlyARM。
测试程序源码
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <errno.h>
#define DEV_FILE "/dev/4418_relay"
#define J1_OFF 0x00
#define J1_ON 0x01
#define J2_OFF 0x10
#define J2_ON 0x11
int main()
{
int fd_dev=-1;
char dat[2];
int cmd;
printf("nanoPi driver Test\n");
fd_dev = open(DEV_FILE,O_RDWR);
if(fd_dev<0){
printf("open device err\n");
return 0;
}
while(1){
printf("1:J1 OFF 2:J1 ON 3:J2 OFF 4:J2 ON\n");
printf("Please input:");
scanf("%d",&cmd);
switch(cmd){
case 1:
dat[0] = J1_OFF;
break;
case 2:
dat[0] = J1_ON;
break;
case 3:
dat[0] = J2_OFF;
break;
case 4:
dat[0] = J2_ON;
break;
default:
break;
}
write(fd_dev,dat,1);
}
return 0;
}















 4339
4339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









