







spring
1、弹簧的对象是什么?
一个或两个刚体,其中一个是父对象,而另一个是子对象。在模拟进行时,弹簧将始终试图保持其长度,从而限制其两端对象的运动。我们可以设置弹簧的硬度、阻尼和长度: 并选择其伸缩方式(只伸长、只收缩或二者都有)。当弹簧有效时会自动被加入模拟中,基于两个对象的弹簧当两端连接了两个刚体时为有效,基于一个对象的弹簧当连接了一个刚体时为有效。无效且未被选中的弹簧将在视图中显示为红色。
2、弹簧属性面板:
中英文对照:
Parent 父亲
child 子
Relative Transform 相对变换
Dynamic 动态的
Stiffness 刚度
Rest Length 放松后的长度
compression 压缩
extension 拉伸
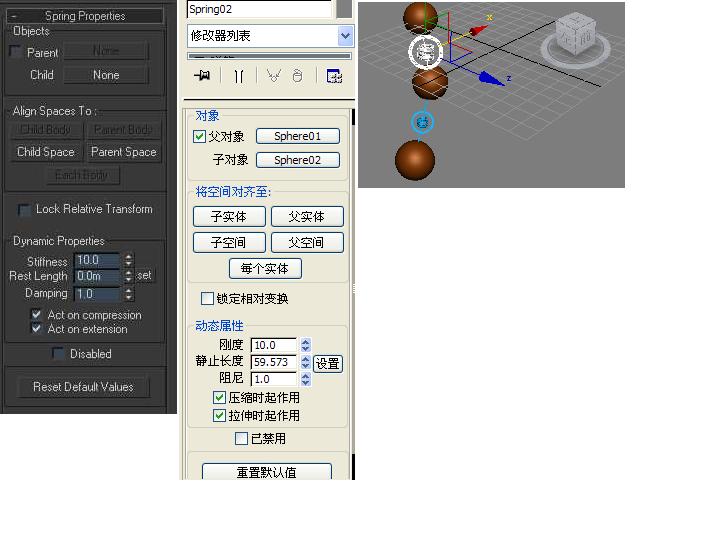
Parent (父对象)按钮:若此弹簧只连接一个对象,不要勾选前面的复选框;若是连接两个对象的,勾选前面的复选框,单击此按钮选择要连接的父对象,按钮上将显示父对象的名称。
Child (子对象)按钮:单击此按钮,在视图中选择想要当作子对象的对象,此时弹簧的一端就与该对象的轴心连接上了,按钮上将显示子对象的名称。
Align Spaces To (对齐坐标系)选项組
设置对象约束坐标系的对齐方式,共有5种
Lock Relative Transform (锁定相对位移):选中此项时,父对象与子对象约束坐标系 之间的相对位移将被锁定,移动子对象的约束坐标系时,父对象的约束坐标系也将随 之移动,反之亦然。 flf
Dynamic Properties (动力学属性)选项组
Stifl&iess (硬度):弹簧的伸縮能力,有效值为大于等于0的数,默认值为10。
Damping (阻尼):这一参数控制弹簧停止振荡的快慢程度,有效值为大于等于0的数,默认值为1,通常设置为0.1。
Rest Length (长度):弹貧力求达到的自身长度,可以输入数值或使用Set按钮设置。 弹簧长度在视图中会以两个小立方体标志间连线的方式显示出来,两个大立方体标漆指示的是对象的连接点。
Set (设置):单*此按钮,弹資长度会被设为当前视图中两个对象连接点间的距离。
Act on compression (对收缩生效):默认为选中,弹簧收缩。
Actonextosion (对伸长生效):默认为选中,弹簧伸长。
Disabled (禁止):选中此框时,弹簧不会被加入模拟。
Reset Default Values (恢复为默认值):单击此按钮将弹簧的硬度长度阻尼、对收缩生效、对伸长生效的设置恢复为默认值。
父对象
启用时,该弹簧具有两个实体,可以将对象指定给父实体。禁用时,该弹簧是单个实体,Parent Space 子对象占用的点为父对象。
通过单击该按钮,然后从任何视口中选择一个刚体,就可以指定父对象。此后,该按钮显示父实体的名称。
显示连接到弹簧上的第二个刚体的名称。通过单击该按钮,然后从任何视口中选择一个刚体,就可以指定子对象。
使用此选项可以对齐实体的局部约束空间。
启用时,子约束空间和父约束空间之间的相对变换被锁定:如果在视口中移动任何一个空间,则另一个空间也会随之移动。
该值代表弹簧的强度,它控制当弹簧的当前长度与其静止长度的差值每变化一个单位时,弹簧应用于每个附着实体上的力。大于等于 0.0 的值为有效值。默认设置为 10.0。
弹簧会在连接对象上应用力,试图恢复该长度。可以用世界单位为该值指定一个数字,或者使用“设置”按钮。弹簧的静止长度在视口中显示为两个小方框标记之间显示线的长度。大方框标记为对象的附着点。
单击该按钮将弹簧的静止长度设置为两个对象的附着点之间的当前距离。
决定弹簧震动停止下来的速度。它控制由相连实体连接点的相对速率所决定的应用于相连实体上的力。大于或等于 0.0 的值为有效阻尼值。默认阻尼值为 1.0。
启用该选项之后,当弹簧的长度小于其静止长度时,弹簧会将力应用于附着对象上。默认设置为启用。
启用该选项之后,当弹簧的长度大于其静止长度时,弹簧会将力应用于附着对象上。
启用时,不会将弹簧用于模拟中。
单击该选项将“刚度”、“静止长度”、“阻尼”、“拉伸时起作用”和“压缩时起作用”设置为其各自的默认值。
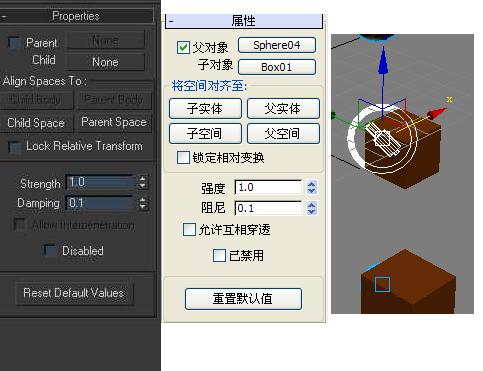
3、关于线性缓冲器(Dashpot)
线性缓冲器类似一个长度为0、阻尼很大的弹簧,它保持连接在它上面的对象之间的相对位置不变,不过对象可以绕连接点自由旋转。当线性缓冲器有效时会自动被加入模拟中,基 两个对象的线性缓冲器当两端连接了两个刚体时为有效,基于一个对象的线性缓沖器当连接了 一个刚体时即为有效。无效且未被选中的线性缓冲器将在视图中显示为红色。
缓冲器通常用于缓解冲力。在现实世界中,线性缓冲器的一个示例就是装在汽车震动吸收器里的液压缸。利用线性缓冲器约束,您可以在模拟中将两个刚体约束在一起,或将一个物体约束于世界空间中的一点。其行为方式与静止长度为 0 且阻尼很大的弹簧相似。您可以指定强度和阻尼,以及是否禁止附着物体之间发生碰撞。
reactor 可以在每个物体的局部空间中指定缓冲器附着点。在模拟过程中,缓冲器将推力作用于附着实体上,试图让这些点在世界空间中匹配,从而将实体保持在相对于彼此的同一位置。实体仍然可以自由地绕附着点旋转。
子空间
在该子对象层级,您可以选择并移动缓冲器附着点到子对象。当您将子实体指定给缓冲器时,“子空间”附着点
就设置为子对象的轴点。如果改变“子空间”附着点的位置,则该点会在模拟期间相对于子对象维持其新位置。
父空间
在该子对象层级,您可以选择并移动缓冲器附着点到父对象。当将父对象指定给缓冲器时,“父空间”附着点就
设置为父对象的轴点。如果改变“父空间”附着点的位置,则该点会在模拟期间相对于父对象维持其新位置。如
果缓冲器是单实体的,则“父空间”的附着点就代表在世界中缓冲器将连接到的点。
父对象
启用时,该缓冲器具有两个实体,可以将对象指定为父实体。禁用时,该缓冲器是单实体的,父空间子对象占用
的点为父对象。
通过单击该按钮,然后从任何视口中选择一个刚体,就可以指定父对象。此后,该按钮显示父实体的名称。
子对象
显示连接到上的第二个刚体的名称。通过单击该按钮,然后从任何视口中选择一个刚体,就可以指定子对象。
将空间对齐至
使用此选项可以对齐实体的局部约束空间。在 使用约束空间一节中可以找到有关刚体的更多信息。
锁定相对变换
启用时,子约束空间和父约束空间之间的相对变换被锁定:如果在视口中移动任何一个空间,则另一个空间也会
随之移动。
强度
根据附着点之间的距离,规定缓冲器应用于每个附着物体上的冲击力大小。强度值是与质量相关的。例如,对于
两个 5 kg 的物体和两个 50 kg 的物体,大小为 10 的强度值会产生不同的行为方式。大于等于 0 的值是该属
性的有效值。默认值为 1。
阻尼
决定线性缓冲器震动停止下来的速度。阻尼根据相连物体的缓冲器连接点的相对速率,规定应用于物体上的冲击
力。有效阻尼值的范围是大于等于 0 且小于等于 100000。默认设置是 0.1。
提示通常,等于刚度 1/10 的阻尼值会得到出色的结果。
允许互相穿透
启用时,将禁止在缓冲器的对象之间发生碰撞,所以在模拟过程中,它们可以彼此通过。默认值=关闭。
已禁用
启用时,不会将缓冲器添加到模拟中。
重置默认值
单击该选项将“强度”、“阻尼”和“已禁用”设置为其各自的默认值。















 2932
2932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









