







概述
交通流分析、预测和管理是新时期建设智慧城市的关键。借助深层神经网络和大交通数据,我们可以更好地了解隐藏在复杂交通网络中的潜在模式。一条道路交通流的动态不仅在时间维度上依赖于序列模式,在空间维度上也依赖于其他道路。虽然已有预测未来交通流的研究工作,但大多数研究在建模空间和时间依赖性方面存在一定的局限性。本文提出了一种新的交通流预测空间时态图神经网络,它能全面地捕捉空间和时态模式。特别是,该框架提供了一个可学习的位置注意机制,以有效地聚集来自邻近道路的信息。同时,为交通流动态建模提供了时序组件,利用了局部和全局的时间依赖关系。在各种真实交通数据集上的实验结果证明了该框架的有效性。
主要的贡献:
- 提出了一种新的具有位置注意机制的图神经网络层,以更好地聚合邻近道路的交通流信息;
- 结合了递归网络和变换层,以捕获局部和全局的时间依赖性;
- 提出了一个新的时空GNN框架STGNN,该框架专门用于建模具有复杂拓扑和时间依赖性的系列数据;
模型
主要由三部分组成:1)空间图形神经网络(S-GNN)层,其目的是通过交通网络捕捉道路之间的空间关系;2) GRU层,按顺序捕获时间关系(或局部时间依赖);3) transformer层,其目的是直接捕捉序列中的长程时间依赖(或全局时间依赖)。
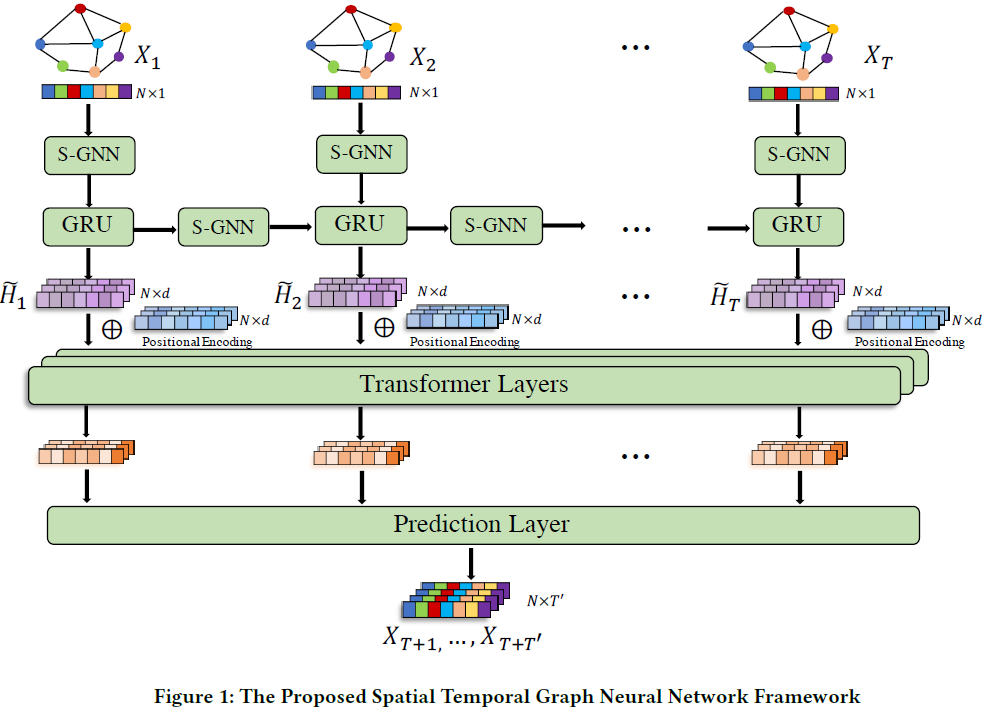
模型框架
模型中多次使用的基础图卷积模块S-GNN:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3250
3250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









