






https://www.youtube.com/watch?v=S-UHiFsn-GI&list=PL2zRqk16wsdoCCLpou-dGo7QQNks1Ppzo&index=1
3D 点如何投影到图像像素平面
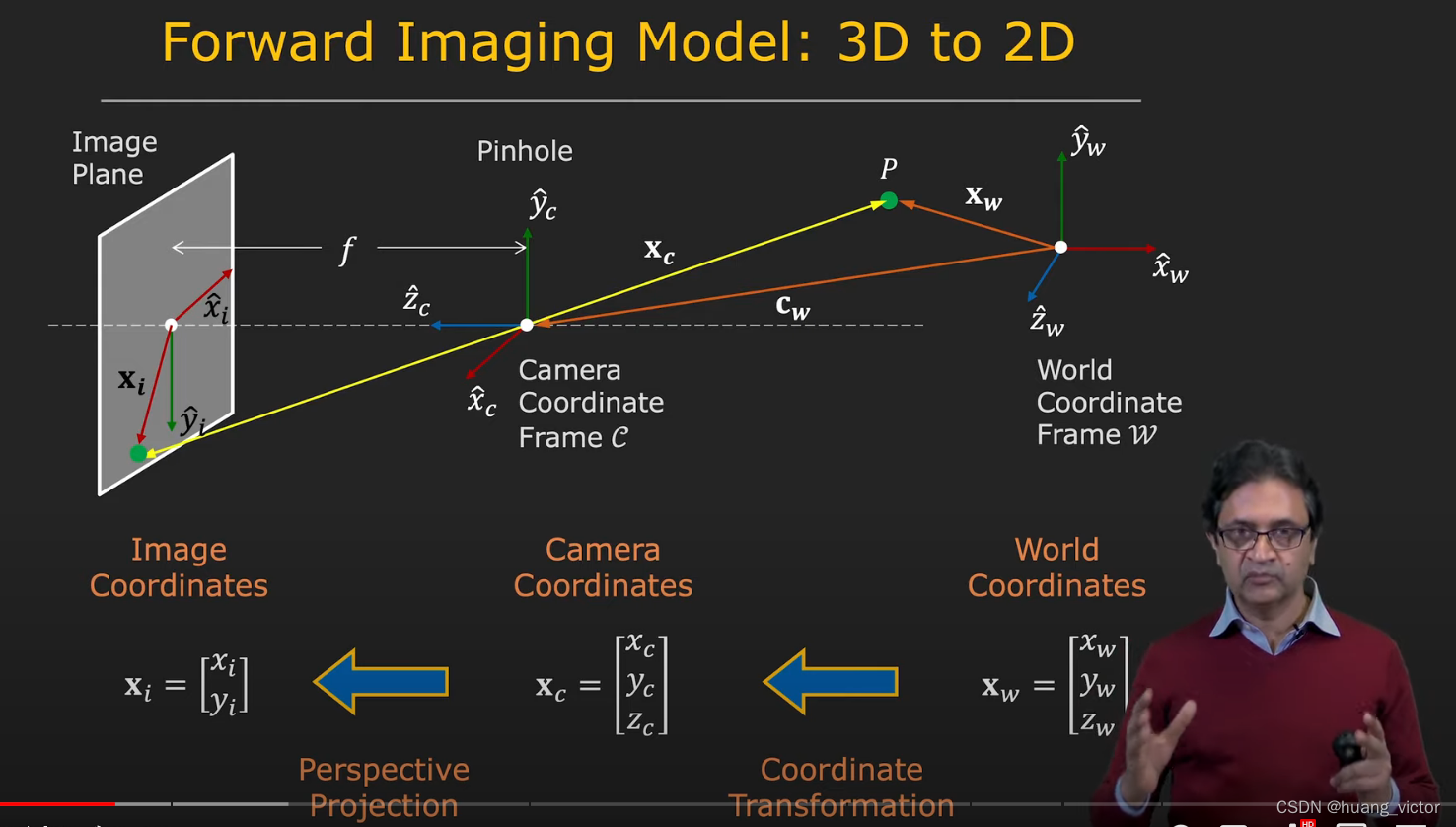
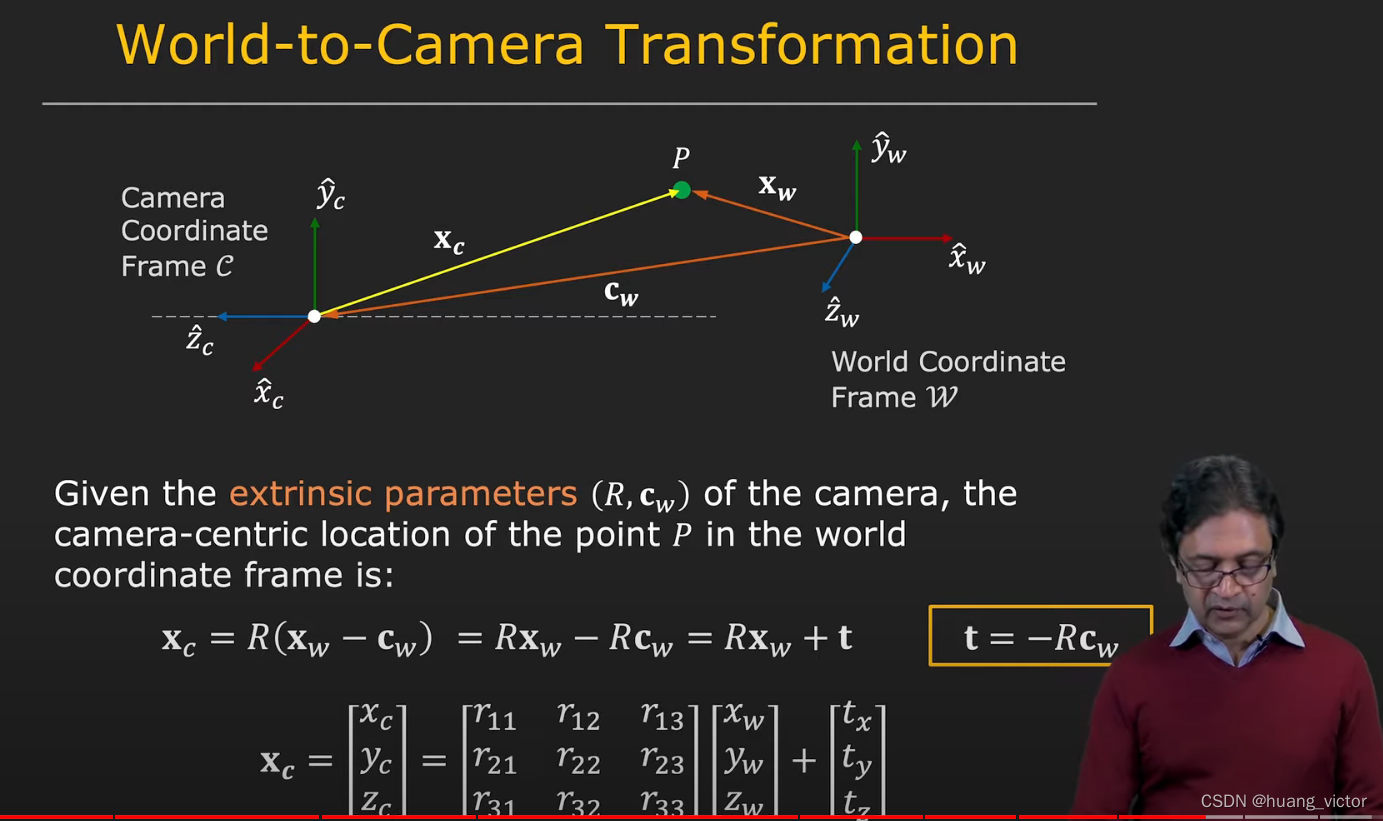
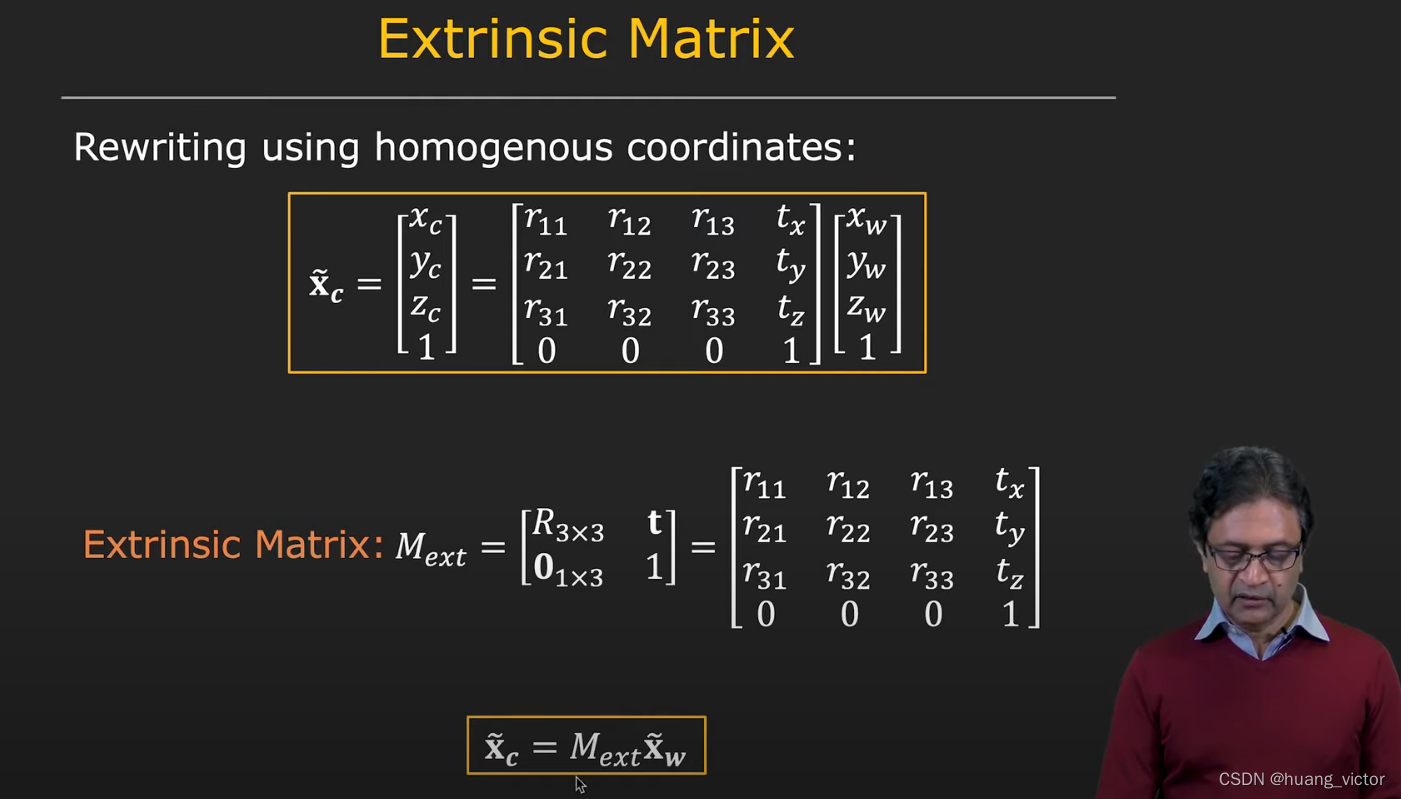
1. 利用lidar和camera之间的外参矩阵,将雷达坐标系下的点投影到相机坐标系下
外参矩阵是一个4x4的齐次旋转矩阵
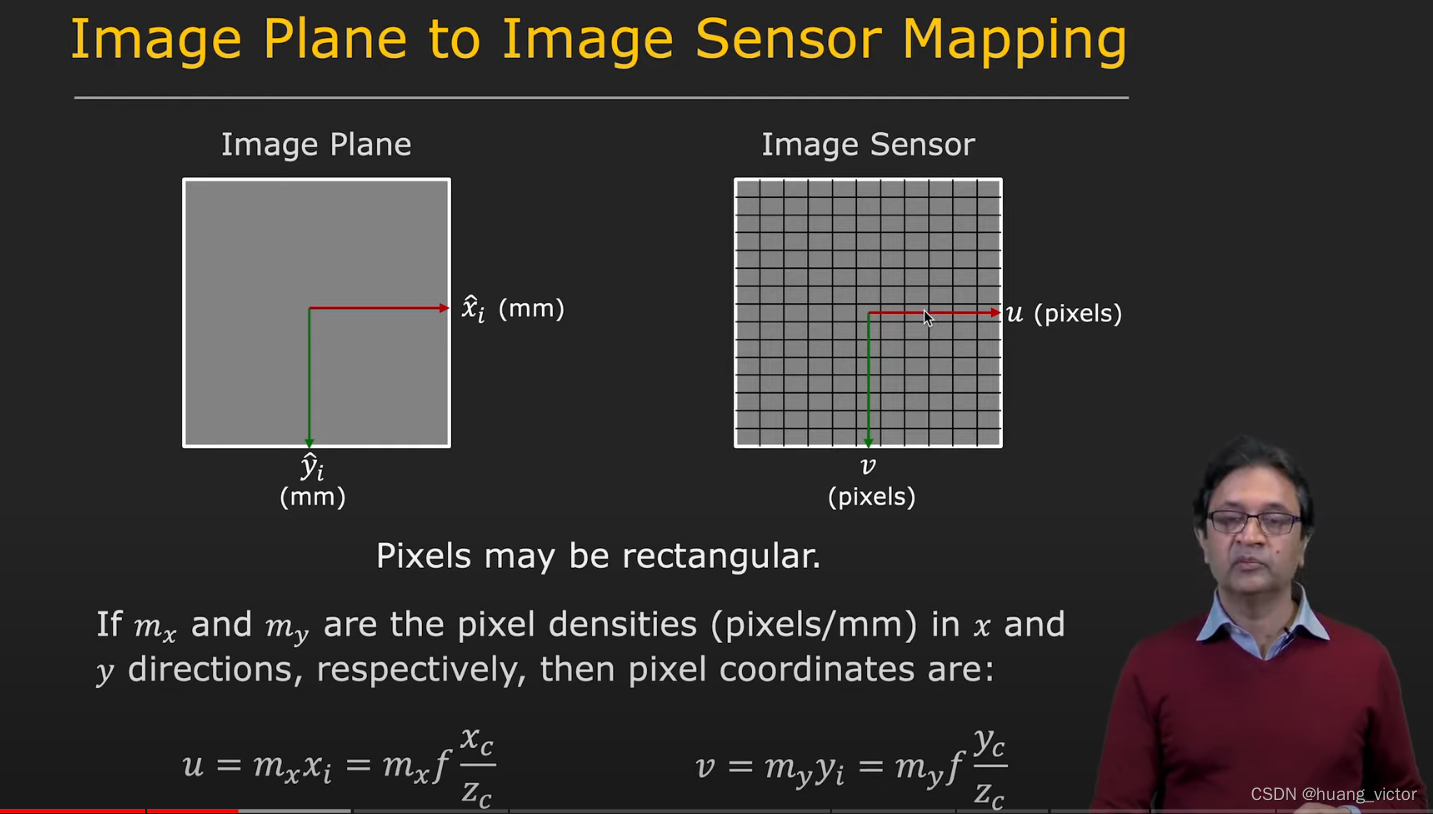
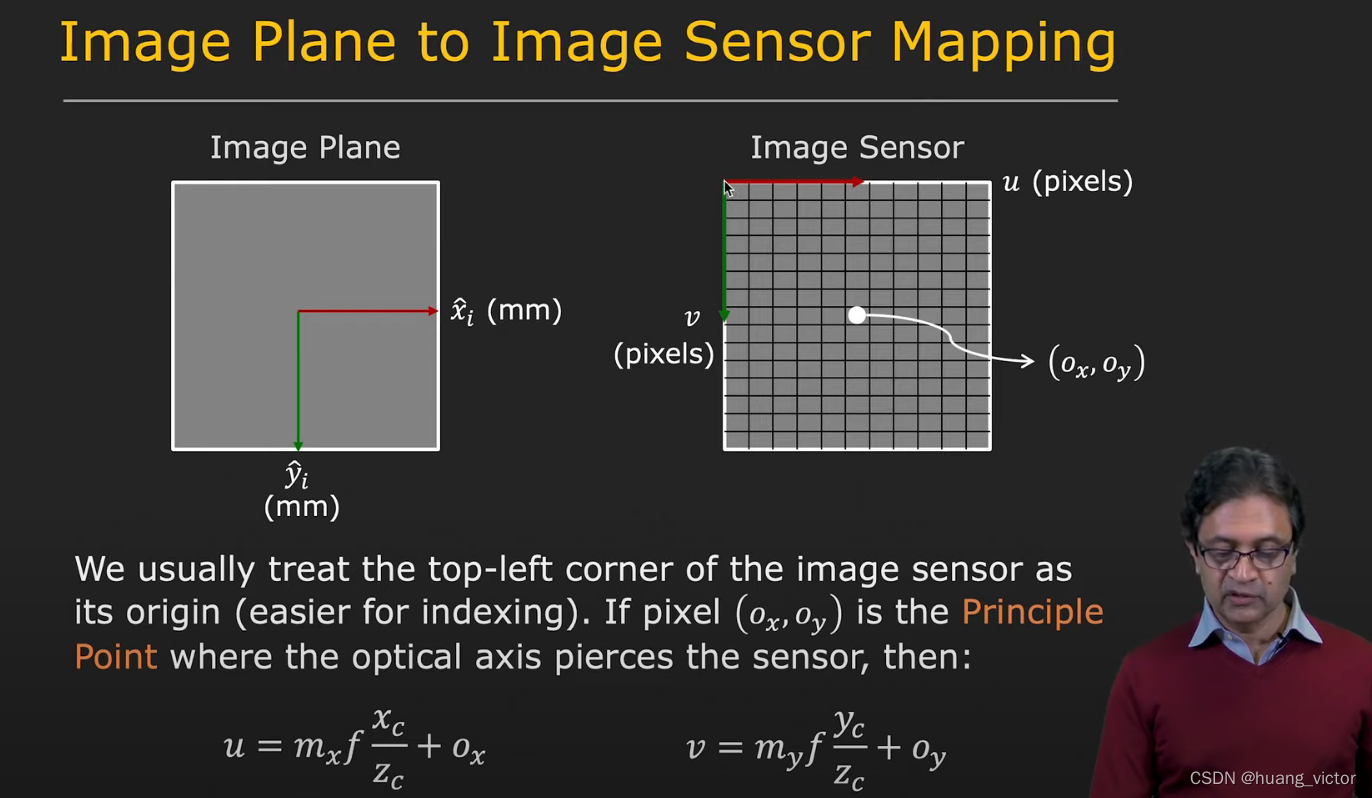
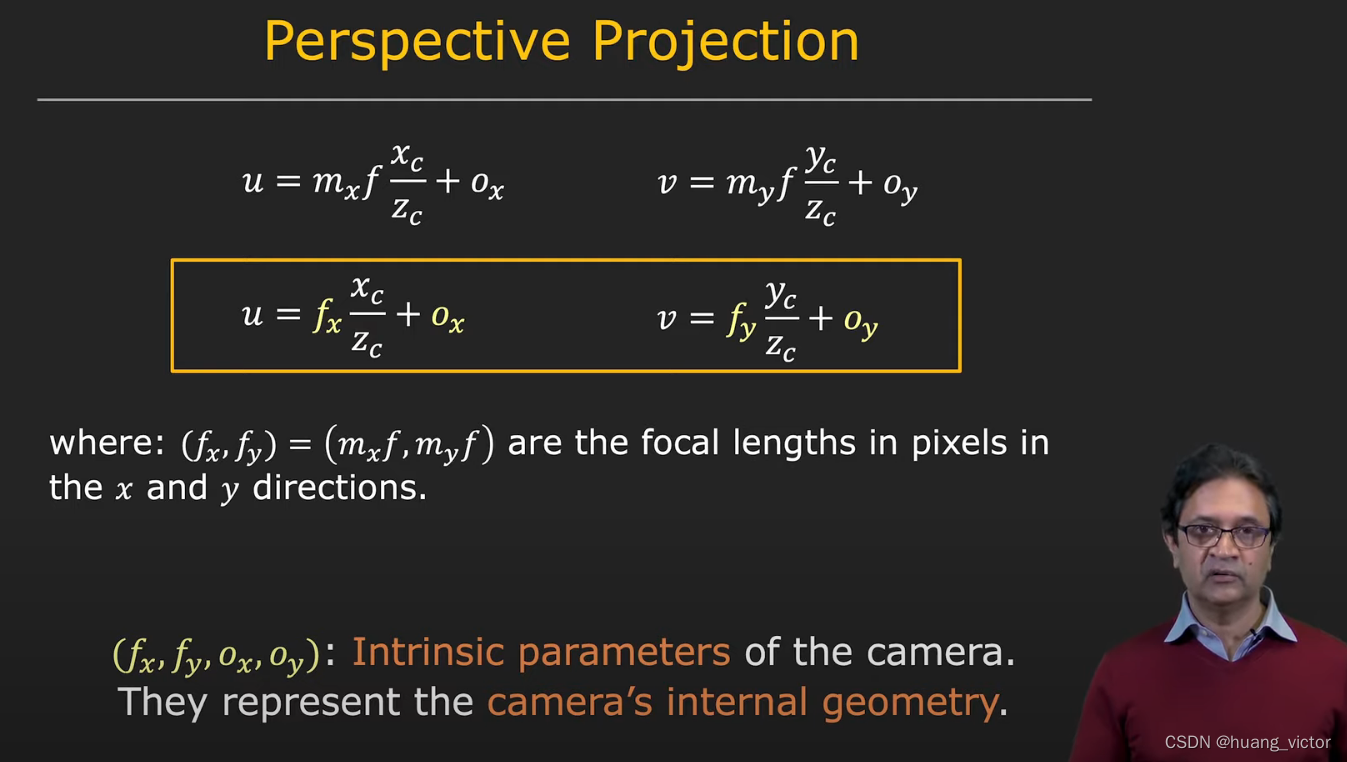
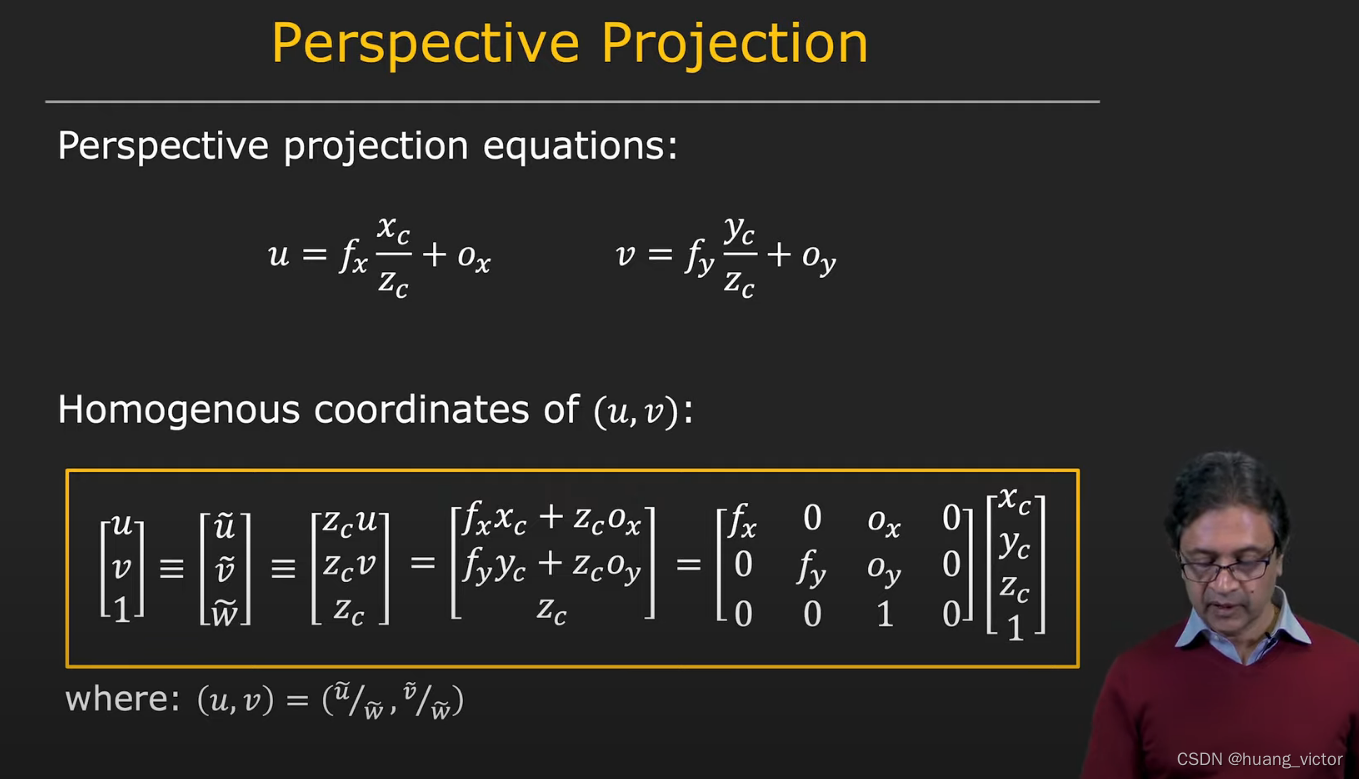
2. 利用相机的内参矩阵,把相机坐标系下的点投影到像素平面
相机的内参,包含畸变参数,k1-k5;包含cx,cy,fx,fy
相机坐标系到像素平面的投影
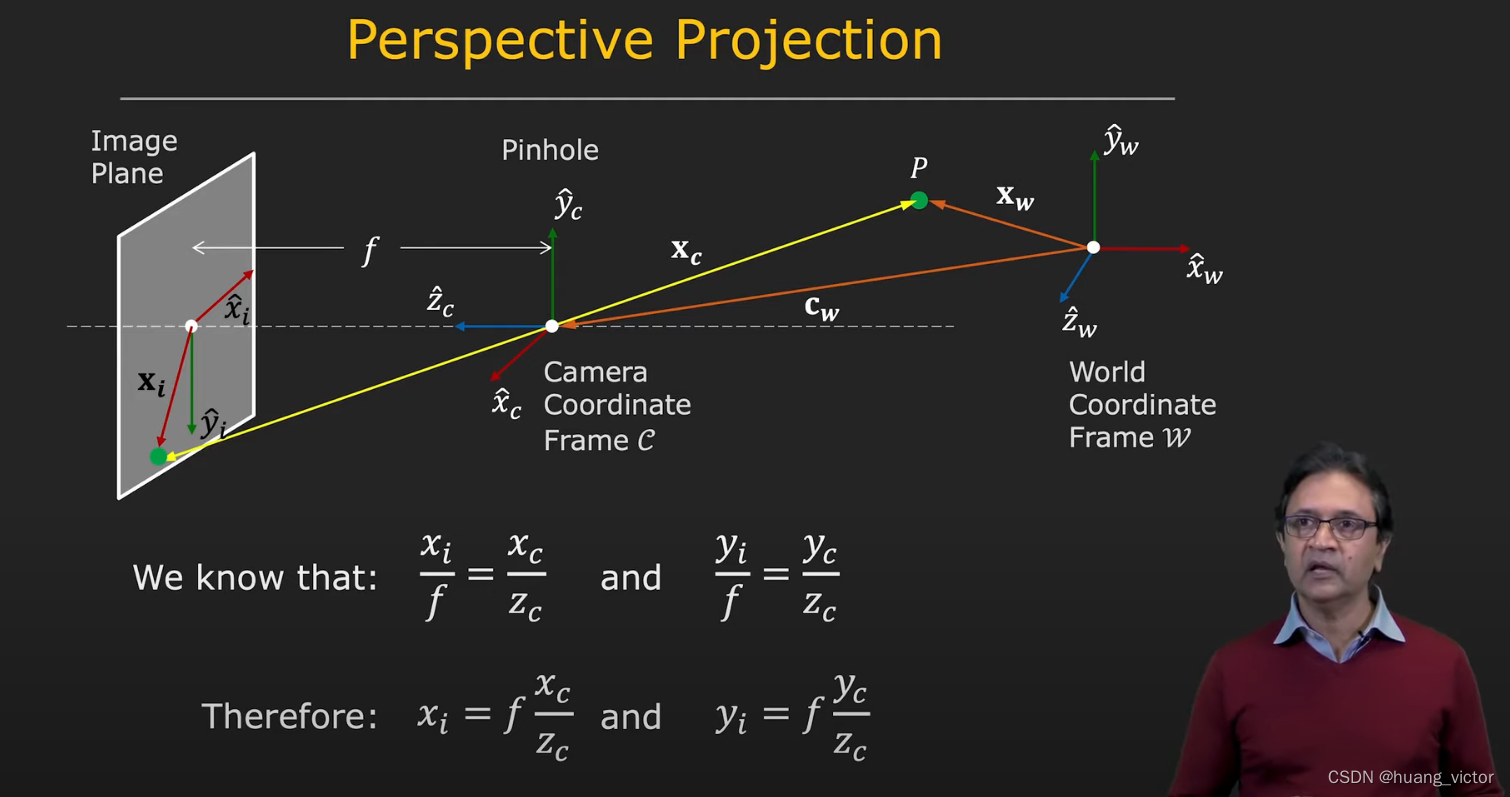
世界坐标系的点投影到相机坐标系














 1934
1934











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









