






写在前面:本文是基于
Rafal Szlapczynski, Joanna Szlapczynska在《Ocean engineering》上发表的
Review of ship safety domains: Models and applications
翻译和整理而成。该篇论文对截至2018年的船舶领域研究和应用进行了系统的综述。整理这篇文章的目的旨在对船舶领域的研究以及其应用方面进行系统的认识和了解,也希望这篇文章能够帮助想要快速进入这个研究领域的朋友们。文章中在引用格式上存在的一定错误,而且出于自己对该领域的认知有限,有些翻译可能并不准确,还请谅解。
3.1 基于实验数据统计的船舶领域模型
代表作3: (Goerlandt et al., 2016)
Pietrzykowski and Uriasz (2009) 是对于开放水域的研究。他们发现小船在与大船会遇时通常会调整他的领域。对于领域的形状,清晰和模糊领域都是非对称的,但非对称程度不大,清晰领域呈多边形形状,模糊领域呈一个类似本船后移的圆形状的不规则形状。他们还发现领域的形状会根据会遇情况而改变,对于船首部分,交叉相遇情况下的领域要大于对遇情况下的。
代表作3: (Dinh and Im, 2016)
------------------------------------------------------------------我是分割线------------------------------------------------------------
第一章 介绍
船舶领域(Ship domain)是安全距离(Safe distance)的一般化,船舶领域被引入海上交通是由于观测到的每个方向的安全距离是不同的。
术语“船舶领域”被广泛使用,但通常由于作者的定义或者构建领域模型的目的不同有着不同的含义,这有时会造成混淆,尤其是对这些领域的尺寸和形状进行比较时。
对船舶领域的总结同样在(Tam et al., 2009)的关于避碰方法的综述文章中有所提出现。然而至今还没有文章对当今的船舶领域模型和相关研究进行综述。
船舶领域按照研究方法可粗略地被分为三类,分别是实验数据统计(determined empirically)、专家知识(based on experts` knowledge)和解析表达(based on analytical)。这三类并不是相互独立的,有时也有学者对以上三类进行组合。
基于实验数据统计的船舶领域通常比较简单,因此其应用也有一定局限。领域尺寸和形状要简便到满足统计层面计算的需求,所以精确的尺寸对于该类型领域便不那么重要了。该类型的领域被成功应用在评价水道的容量方面,但在船间避碰方面就会显得不够详细。
基于专家知识的领域的应用范围要更广一些,通常包含上面提到的避碰并延伸到危险接近局面的探测以及水道的风险分析。由于这些目的很重要,所以该类的领域都很大程度的参数化以包含多种对碰撞危险产生贡献的元素。
无论哪种领域模型都是会受到水域影响的,程度多有不同。
对于评价水道容量和水道风险时,水域的不同体现在水道的形状、交通密度和交通模式。
对于避碰系统来说,水域的不同多指类型上的不同,比如狭水道、限制水域或开放水域。
确定船舶领域的方法随着时间的进化:
早期的(Fuji and Tanaka, 1971; Goodwin, 1975; Coldwell, 1983)模型是基于雷达数据的统计处理,属于基于实验数据统计的船舶领域。
实验数据方法至今仍然在继续,但作为数据源的雷达已经广泛被AIS取代,并且出现了一些更先进的统计方法来处理数据。代表作有(Hansen et al., 2013; van Iperen, 2015)。
专家知识类当今的代表作有(Pietrzykowski and Uriasz, 2009)。
解析表达类当今的代表作有(Wang et al., 2010; Wang, 2013)。
以上两种类型的组合的代表作(Dinh and Im, 2016)。
这两种(和组合)更适合在避碰系统、碰撞危险分析和近距离会遇局面探测时使用。
第二章 领域的定义、解释以及实际含义
不同的船舶领域所确定的船舶间距是不同的,具体是要根据该领域的定义以及相关的安全标准(Safety criteria)。
船舶领域的三个传统定义:
Fuji (1971): a two-dimensional area surrounding a ship which other ships must avoid – it may be considered as the area of evasion.
Goodwin (1975): the effective area around a ship which a navigator would like to keep free with respect to other ships and stationary obstacles.
Coldwell (1983): the effective area around a ship which a typical navigator actually keeps free with respect to other ships.
其实这三种定义是差不多的,只是由于被不同的作者用不同的方式来阐述,并且导致了在研究中所采用的不同安全标准。
四种安全标准:
a. 本船领域不被目标船侵犯 代表作: (Coldwell, 1983)
b. 目标船领域不被本船侵犯
c. 两船的领域都不被对方侵犯
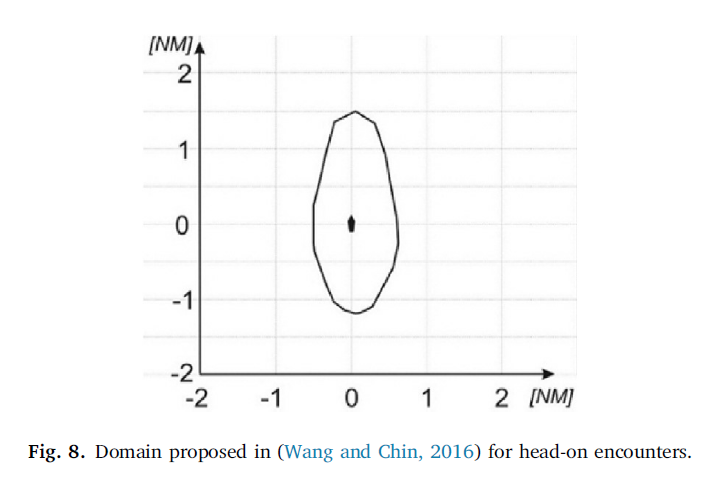
d. 两船领域不重叠,相互独立 代表作: (Rawson et al., 2014; Wang and Chin, 2016)
这四种安全标准的区别十分重要,因为其对船舶间距的影响十分大,所以安全标准与领域的尺寸和形状一样重要。
前两种安全标准是不对称的,即便是使用相同的领域。前两种标准根据采用哪艘船来进行评估会导致不同的安全评估结果。
而后两种安全标准是对称的,无论采用哪艘船进行评估。
第四种安全标准是最强力的,因为他不符合以上提及的任何领域定义。传统定义是领域不被他船侵犯,而第四种安全标准要求领域不被其他领域侵犯。(由于这是一种递归定义,所以对于船员来说不太直观)。
现在的研究者有时把四种标准混着用或者说不去刻意区分,这是很不可取的。因为四种标准会导致四种不同的船舶间距,有时这些间距的差别十分大,甚至比不同研究者确定的不同领域的尺寸区别还要大。所以在研究船舶领域时一定要确定安全标准。
文中以改进的Coldwell领域模型(增加了尾部区域)为例,并假设两船的尺寸,选取七种不同的会遇情形,分别采用四种不同的安全标准得出每种情形的最小间距值。一方面证明了四种安全标准导致的最小间距的差异,同时通过比较分析得出以下结论。
1.采用第一种标准时,交叉相遇穿过目标船首和船尾的情况下的间距是比较小的。当目标船在右舷时,穿过目标船首情况下的间距稍微大一些,这符合避碰规则。但目标船在左舷时这个间距就十分的小,这是很有问题的。
2.采用第二种标准时,跟第一种标准差不多,但是在穿过目标船船首时的间距要稍微大一些,不过需要注意的是,如果是目标船穿过本船船首,那么就与第一种标准完全一样了。
3.采用第三种标准时,确定的船舶间距对于每一种会遇情况都是比较合理的。
4.采用第四种标准时,船舶间距明显要大一些。
5.前两种标准,根据选择不同的船舶为视点,得出的间距是不一样的(尤其是在交叉相遇的情况下),这就会导致相同局面下的评估结果有很大的不同。代表作Zhao et al. (1993),研究有着非对称领域的两船的对遇情况。
总的来说,只有第三种标准对于两船都是安全的并且符合传统的领域定义。然而需要注意的是,以上的分析只是在避碰规则13到16条下的,对于一些特殊情况比如港区、狭水道和通道分航水域,还要考虑水域特别规则、避碰规则第9条、第10条。 该方面的代表作有(Pietrzykowski 2008, Rawson et al. 2014, Wang and Chin, 2016)。
第三章 方法、考虑的因素以及主要的发现
如上文所述,确定船舶领域的方法有三类,分别是基于实验数据统计(empirical)、基于专家知识(knowledge-based)以及基于解析表达(safety analysis-based)。
当今的船舶领域模型通常被很多参数来描述,这些参数反映了会遇时影响安全距离的不同因素。这对于后两类船舶领域确定方法是很常见的,这些方法使分别对每一个因素的影响进行调查成为可能。
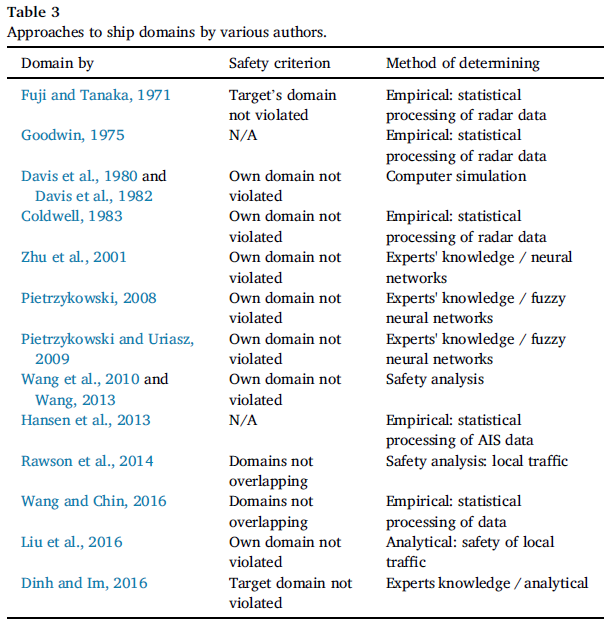
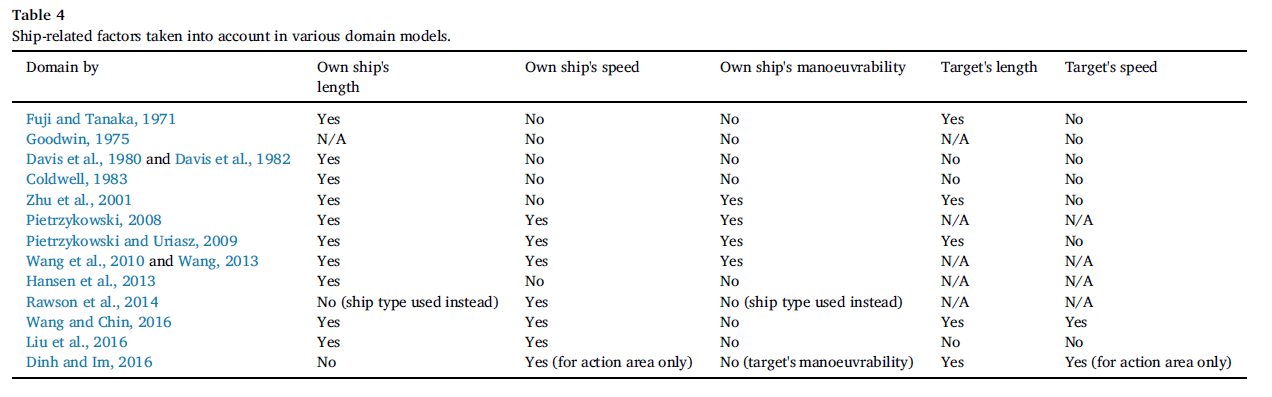
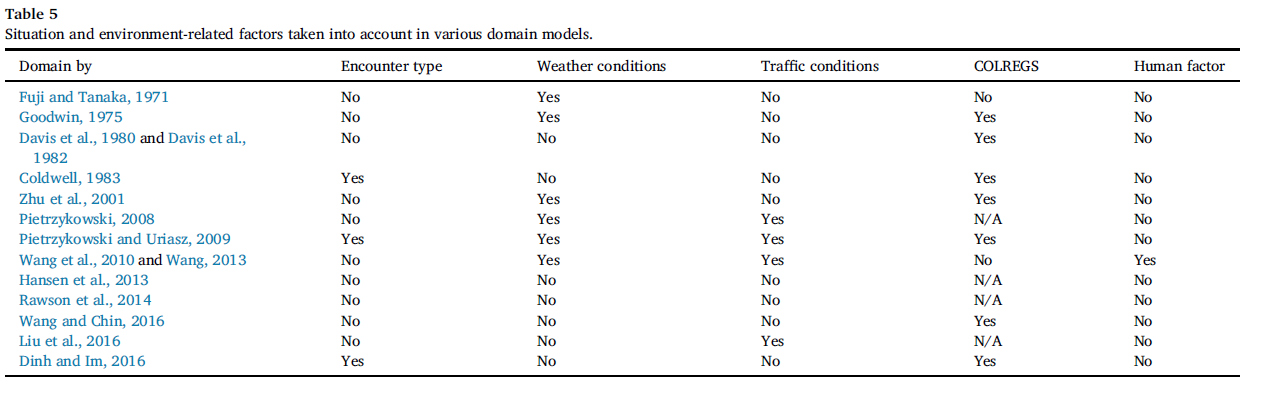
下列三个表格分别是当今的船舶领域与其确定方法以及采用的安全标准(Table 3)、当今的船舶领域以及其涉及到的船舶参数(Table 4)、当今的船舶领域与其涉及到的环境参数(Table 5)。
近来,AIS数据被用来确定船舶领域。
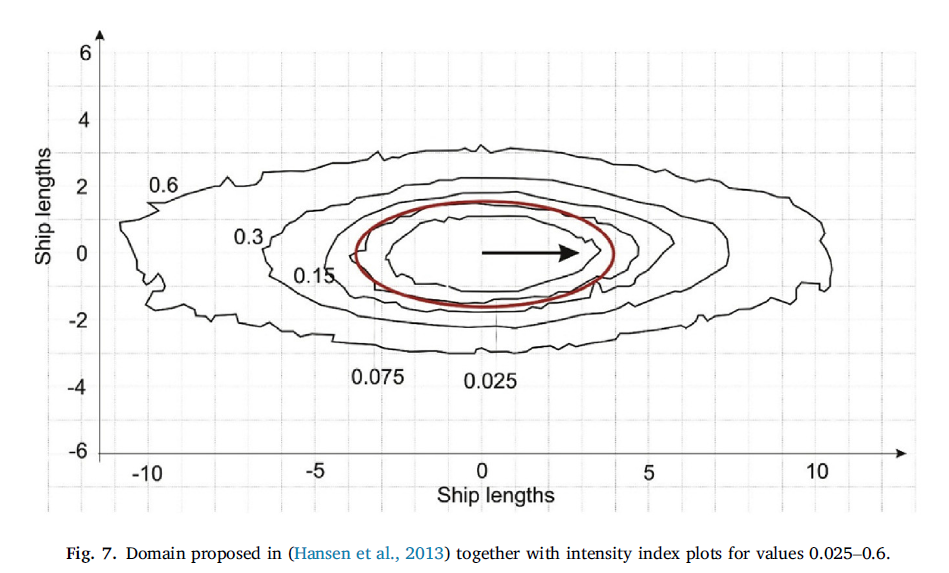
代表作1: Hansen et al. (2013)
数据来源于丹麦水域。作者假设领域与船舶长度成正比,并采用发光强度图来确定领域的形状。确定的椭圆形状与Fuji and Tanaka(1971)和Coldwell(1983)比较类似。最终在不同的水域进行了大量的实验确定了领域的尺寸。作者总结道这个领域可以很好的在研究水域中模拟安全交通。
这个领域之后也被应用在评价分道通航中交通效率中 (Jensen et al., 2013)。
代表作2: (Wang and Chin, 2016)
这个领域是针对特殊水域的—新加坡港和新加坡海峡作者假设领域的尺寸与船舶长度成线性关系,与船舶速度成二次关系,并且每个方向的安全距离与极角有关。通过这个假设,作者使用遗传算法(GA)找到了角关系以及长度和速度的系数。作者同时假设一个自由形状的有着很多顶点的多边形,以至于不把领域的形状局限为传统的偏心圆或椭圆。
这个领域是针对冰区航行的。在冰区航行时,舰队往往要跟在破冰船后面,那么保持船与船的间距就十分必要,而这些间距要通过冰况来确定。
3.2 基于专家知识的船舶领域模型
代表作1: (Zhu et al., 2001)
该模型的确定使用了BP神经网络(BPNN),首先进行包含了不同局面下的船员的评估数据的调查,然后利用BP神经网络把这些收集到的数据泛化为规则。由于采用了这个方法,在考虑本船和目标船长度的同时还可以把本船操纵性、避碰规则以及天气情况考虑进来。
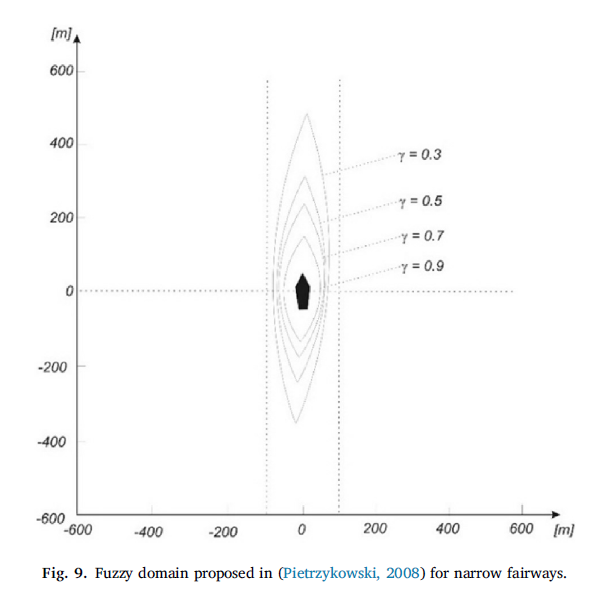
代表作2和3: (Pietrzykowski, 2008; Pietrzykowski and Uriasz, 2009)
这两篇文章都被视为对Zhao et al. (1993) and Zhu et al. (2001)的延伸工作,因为他们都是用了船员的知识以及神经网络来确定模糊船舶领域。在方法上的主要区别是,这两篇文章都是针对专门的水域(前者是狭水道,后者是开放水域)并且使用了模糊神经网络。
Pietrzykowski (2008) 对于船舶参数额外的考虑了本船的速度,并且第一个提出了目标船的相对速度的重要性。对于环境参数,他额外考虑了会遇类型和交通条件。他最主要的发现是船舶间距与船员感知的安全程度之间的关系。他发现船舶间距和领域边界与安全等级呈指数关系,这就意味着安全等级与船舶间距的对数成正比而不是单纯的与间距成正比。这暗示了在很小的间距时安全程度可能增长的十分迅速,但对于很大的间距就增长很缓慢并且永远达不到最大值。
尽管他们的研究是针对特定水域的,但在报告的最后他们还提出一个建议那就是建立一个通用的船舶领域是可能的。这个领域在尺寸和形状上很灵活并且包含所有重要的参数(船舶类型、尺寸、操纵参数、本船速度、目标船速度、水域类型、能见度、数据可信度)。 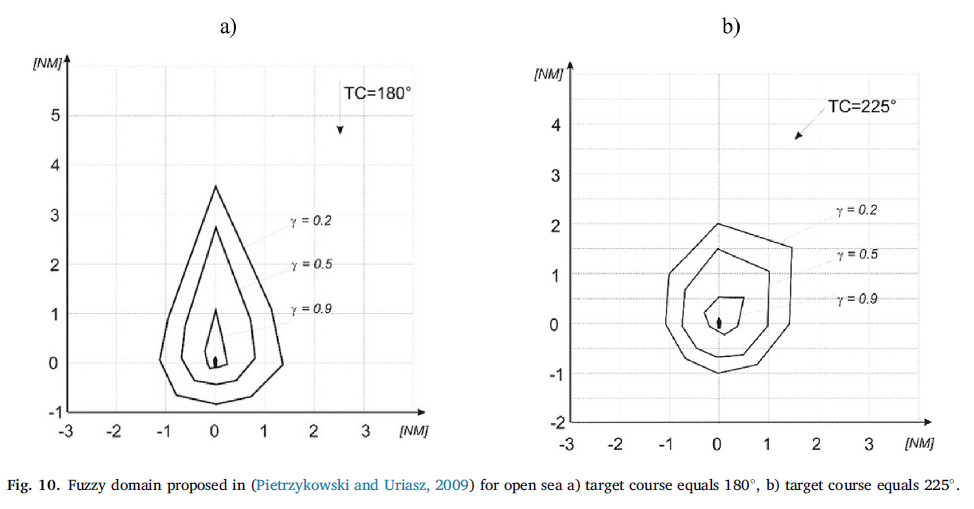
3.3 基于解析表达的船舶领域模型
代表作1: Zhao et al. (1993)
这是第一篇基于解析的文章,作者并没有拓展因素的参数,他对传统的领域进行了批判性分析,并引入了模糊船舶领域。与清晰领域不同,模糊领域会根据不同的安全程度进行改变。
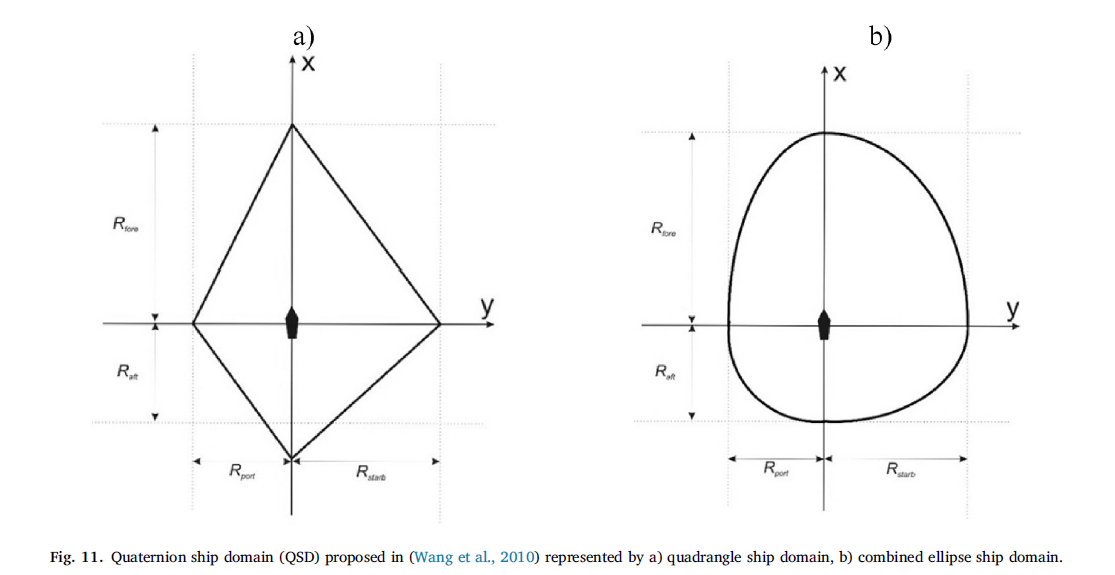
代表作2: (Wang et al., 2010) (Wang, 2013)
这是一个完全基于解析的领域模型。作者提出了四元船舶领域(Quaternion Ship Domain)。领域尺寸由前后左右四个方向的半径决定,而形状则由另一个指数决定。这五个参数都是速度、船长和操纵性的函数。操纵性则被定义为船舶进距和战术直径。基于四元船舶领域,作者提出了模糊四元船舶领域(FQSD),与
(Pietrzykowski and Uriasz, 2009)
类似。作者于
(Wang, 2013)
中进一步提出了动态四元船舶领域(DQSD),在四元船舶领域的基础上考虑了时变环境(包括交通情形)、人为因素(船员状态)同时在船舶操纵性上应用操纵模型组模型(MMG)。伴随着计算机模拟阐述了动态领域如何不断改变尺寸和形状以至于调整到适合典型会遇局面的情形。
这是一个四边形船舶领域,该领域被视为Wang et al. (2010)的一个特定案例。作者称该领域为“blocking area”,是目标船周围的一片不能被本船侵入的区域。领域的尺寸主要依据本船的进距,在对遇情况下还依据目标船的进距。作者还提出了“action area”,是指一个船舶必须进行避碰行为的圆形区域。类似的概念还在(Krata and Montewka, 2015)中被提出,该作者考虑船舶操纵性通过电脑模拟确定了一个临界区域,这个区域的侵犯意味着无法避免碰撞。
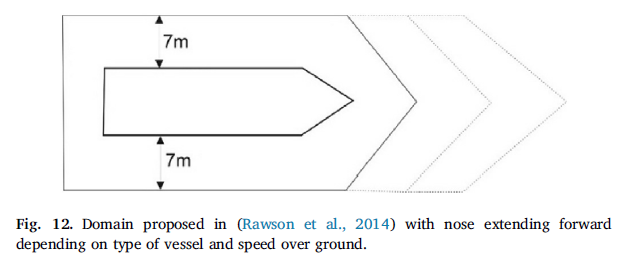
代表作4: (Rawson et al., 2014)
该领域是针对特定水域的(泰晤士河的一部分)。通过咨询各种利益关系人得出了船舶两侧的7m缓冲区,而船首部分领域由反应距离决定。反应距离等于船舶10s前进距离乘以操纵性参数。因此该领域只与船速和船型两个因素有关,后者则包含了船长和操纵性。作者基于该模型使用当地VTS提供的AIS数据对交通安全进行了大量的分析。
代表作5: (Liu et al., 2016)
该领域用来进行限制水域航道的容量分析,针对的是天津港水域。这个领域与Wang (2013)的动态四元船舶领域类似,是一个动态的椭圆形领域,然而与(Hansen et al., 2013)不同的是,该领域的椭圆形状是任意选择的,而不是基于实验数据。同样半轴的长度也不是根据实验得到的,而是分别对待不同的典型问题通过解析得到的。
3.4 有关船舶领域模型的一些讨论
下面会讨论三种确定船舶领域的方法各自的局限性。
基于实验数据统计的方法
基于实验的方法受水域类型的影响很大。水域不仅仅因交通密度而不同,同时在会遇的种类的数量上也有很大不同。狭水道中以对遇为主,分道通航中以追越和交叉为主。而一些研究者并未提供这些会遇种类的百分比甚至是分道通航中会遇种类的百分比。另一个问题是操纵中的情况下并不能代表实际船舶领域尺寸。因为操纵以前进为主(尤其是在宽度受限的情况下),这种情况下的间距会明显大于船舶没有进行操纵的情形。而对遇情况下,这个距离大约会变为实际的二倍,因为两艘船舶都在前进。
基于专家知识的方法
基于知识的方法很大程度依赖被调查船员的选择,哪怕是专家的选择也是存在一定主观性的,同时也受调查问卷的问题和设定的情形所影响。
基于解析表达的方法
基于解析的方法同样存在主观性的问题,因为基于解析得到的结果依赖很多的假设(有些假设甚至是有争议的),而且被考虑的因素往往是出于研究者自己的意愿。
通过比较可以发现,当今的船舶领域模型的形状与传统领域模型是相似的,特别是基于实验类的船舶领域。比如(Hansen et al., 2013)。
而(Wang and Chin, 2016)虽然也是基于实验的方法,但对比前者增加了更多的参数并且与传统的模型联系在了一起。他们考虑了本船的速度和长度,但同时他们假设领域不能重叠,所以要同时考虑两船的速度和长度。作者声称他们的领域的优越性在于自由形状的多边形的领域形状,但是这是有争议的。首先,这个领域形状与传统的椭圆形太过于类似。其次,使用第四种安全标准的情况下,很难对有效间距与使用其他领域模型时的间距进行对比。同时,结果上的差异一定程度上是由于水域的区别。
(Pietrzykowski and Uriasz, 2009)与Davis et al.(1980) 提出的偏心圆领域模型是相似的,同样的使用了计算机模拟而不是实验。然而在交叉相遇的情况下,他们的领域尺寸与Coldwell (1983)太过于相似。总而言之,他们考虑了更多的因素进去,并且假定加入更多的因素以至于确定一个通用的船舶领域模型。
(Wang et al., 2010; Wang, 2013)受到前者的关于通用领域的假定的启发,设计了一个比较符合通用领域的模型,它是至今最复杂的船舶领域模型并且包含了最多的参数。但是,这个领域也有一定的局限和问题。首先,这个领域完全是通过解析确定的以至于被质疑成为一个太过于理想的领域,而在实际情况中不一定有足够的水域去使用它。其次,这个领域包含了大量的参数使得领域很不方便,因为很多参数值要经常更新。最后,这个领域模型考虑了目标船的速度和长度,但在最终的方程中却没有体现。
(Rawson et al., 2014)觉得前面两位的模型太过复杂华而不实,于是就像Hansen一样减少了参数。它只根据泰晤士河的特点确定了船舶两侧的7m缓冲区,然而需要注意的是,这个7m缓冲区由于第四种安全标准的引入,会变成14m或更多。作者提出的领域要比其他研究中的都要小,有点Pietrzykowski (2008)里的对数关系的意思。小的领域在这里对于船员来说是很有效的。不过有人质疑它的领域不过是Pietrzykowski (2008)的领域在低安全水平时的特殊情况,并且使用了不同的安全标准。
(Liu et al., 2016)的针对特定海域的模型与前者是相似的,但其在参数关系上更加完善,以至于能得到精确的领域尺寸数值,特别是在交叉的情况下。不幸的是,作者并没有明确给出领域的尺寸以至于不能进行直接的比较。
对于非典型领域模型,(Dinh and Im, 2016)提出的“action area”和(Krata and Montewka, 2015)提出的区域并不符合Goodwin (1975)的定义,更像是(Davis et al., 1982)提出的动界(arena)。动界是指一个区域被侵入会触发避碰行为以至于避免侵入他船领域。
总的来说,尽管有着很多相似性,以上列出的各种船舶领域还是有很大的不同的,特别是当他们针对不同的水域和特定目的时。然而,一些领域模型能被轻易的辨识出来,他们与传统的偏心圆与椭圆模型有很大的相似性,尽管研究方法和工具产生了很大的进步。
此外,以上所有的领域模型都可以通过增加船舶吃水和净空高度这两个参数来变成3D船舶领域模型。
最后,
船舶领域的相关问题中仍然在被研究的是船舶轨迹预测的问题
。尽管很多的领域模型考虑了船舶操纵性
(Zhu et al., 2001; Pietrzykowski, 2008; Pietrzykowski and Uriasz, 2009; Wang et al., 2010; Wang, 2013)
,但它对于领域尺寸和形状的精确影响却没有被充分的研究出来。
(Krata and Montewka, 2015)
通过船舶操纵性确定了一个船舶周围的临界区域,但它并不是严格意义上的船舶领域。同样的,运动船舶在接近时并不是纯走直线这一点也没有被充分考虑。
(Perera and Soares, 2010; Perera et al., 2012)
研究了船舶轨迹预测,把这个研究引入船舶领域是很有益处的,因为船舶领域的概念与强调船舶间确切距离的近距离会遇是相关的。
第四章 船舶领域的应用
船舶领域主要应用在避碰、危险接近检测、水道风险分析、水道容量分析这几方面。
4.1 避碰
尽管参考船舶领域的避碰研究很多,但实际使用船舶领域而不是仅仅提及的却很少。安全距离(safe distance)在这类研究中占主导地位(Tam et al., 2009; Tam and Bucknall, 2013; Zhang et al., 2015a; Perera and Soares, 2015; Lee et al., 2015; Pietrzykowski et al., 2016),并且被视为船载系统的产业标准(Chin and Debnath, 2009)。而真正使用船舶领域的避碰研究往往使用的都是老模型或者极度简化的当今模型。
(Chang et al., 2003)使用了Fuji and Tanaka (1971)模型,在他们的研究中,通过领域的网格化表示来在光栅海图上确定最优安全路径。
(Kao et al., 2007)建立了一个基于模糊推理的VTS专用的避碰系统,在这个研究中,他们使用了简单的圆形领域,领域半径等于安全距离。领域半径由本船长度、速度以及海况的语义值通过模糊推理系统得出。
(Tsou et al., 2010)的通过遗传算法(GA)建立了一个避碰方法,同时考虑了避碰规则。然而这项研究中使用的也是圆形领域,而且避碰规则是被分开处理的。(Tsou, 2016)把避碰方法与电子海图结合在了一起,但是领域模型仍旧是半径任意设定为1.5海里的圆形。
(Zhang et al., 2015a)提出了一个符合避碰规则的分布式的防碰撞系统。在这项研究中,领域是一个安全环(safety ring),更接近(Davis et al., 1982)的动界,文中称之为“action range”,它是一个6海里的距离,并且会根据期待的领域大小改变。这个区域的半径被称作与很多要素相关,比如船舶尺寸、水域类型、天气条件、交通密度和值班员经验。但实际上仅仅被任意的设定成1.5海里并可以根据值班员的意愿进行调整。
在(Szlapczynski, 2013)的对于基于进化算法的安全船舶轨迹规划的研究中,使用了改进的Coldwell (1983)领域模型。(Szlapczynski, 2015)则是该研究在能见度受限的情况下。
(Szlapczynski and Szlapczynska, 2015, 2017)的对于避碰操纵可视化决策工具的研究中也使用了相同的领域模型,并且是分析领域相关的碰撞危险参数的基础,该种参数包含了领域侵入时间(TDV)(Szlapczynski and Szlapczynska, 2016)。
Lazarowska (2015)基于蚁群算法提出了船舶安全轨迹规划的方法,这个方法使用了(Smierzchalski and Michalewicz, 2000)提出的六边形船舶领域。(Lazarowska, 2016)对于同样的问题提出了确定性的方法,并且再次使用了六边形领域模型,领域半径与能见度和天气条件有关。
4.2 危险接近检测
(van Iperen, 2015)根据相对船舶领域的入侵对北海的交叉相遇、追越和对遇的近距离会遇情况进行了研究。该研究应用了船舶领域的概念,并且建立了类似(Hansen et al., 2013; Wang and Chin, 2016)的基于实验的领域,形状类似,但尺寸要大一些。
(van Westrenen and Ellerbroek, 2017)对同片水域进行了研究,这项研究中使用了与(Fuji and Tanaka, 1971)尺寸相同的船首中心船舶领域来研究近距离会遇时复杂多船冲突的影响。
(Wu et al., 2016)和(Zhang et al., 2016a)也使用了相同的船舶领域(仅以船舶为中心)。前者是对东南德克萨斯水道的冲突检测。后者的领域被补充了很多情形特点来提高近距离船舶碰撞检测的精度。
(Zhang et al., 2016b)提出了一个简化基于AIS数据的船舶轨迹的方法以至于能够减少数据库中的储存。简化的可接受阈值则是根据船舶领域的尺寸以确保简化的轨迹和原始轨迹的差别在安全范围之内。一个类似于Hansen et al. (2013)的快速确定与船长相关的船舶领域的方法在此研究中也被提及。
4.3 水道风险分析
至今为止,安全距离的基本标准经常被应用在水道风险和水道容量。(Chin and Debnath, 2009; Wen et al., 2015; Zhang et al., 2015b; Li and Pang, 2013; Sang et al., 2015; Xiao et al., 2015; Goerlandt et al., 2012) 然而,也有一些改变和更好的方法在被尝试。前文提到的危险接近检测方法就可以被使用在水道风险分析中。
(Qu et al., 2011) 的研究中便基于AIS数据使用了该种方法并使用了(Wang et al., 2010)的模糊四元船舶领域,结合第四种安全标准对新加坡海峡进行碰撞风险评估。
(Weng et al., 2012)对同片水域进行了碰撞危险研究,它使用的是(Mou et al., 2010)的圆形船舶领域。
(Goerlandt and Kujala, 2014)的研究中,对多种碰撞风险分析进行了比较和评估,其中就包括上面的两个研究和其各自使用的船舶领域。(Goerlandt and Montewka, 2015)继续对该问题进行比较和分析。
第五章 其他与船舶领域相关的研究:碰撞危险度和危险等级
碰撞危险度和危险等级的概念是船舶领域的主要竞争对手,特别是在避碰研究中。碰撞危险度是一个简单的清晰或模糊的反应与其他船舶碰撞危险的数值。
通常情况下,碰撞危险度是一个类似代价的值(数值越大危险越大)。
(Xu et al., 2016)
对碰撞危险度的历史进行了总结,并提出了碰撞危险度依据的是DCPA、TCPA和本船船速。
(Gang et al., 2016)
提出了一个更复杂的确定碰撞危险度的方法,它是DCPA、TCPA、船舶间相对距离、相对方位和船速比的函数。
(Qu et al., 2011)
针对新加坡海峡提出了宏观碰撞危险度和微观碰撞危险度,宏观碰撞危险度以船舶速度离散程度为主要参数,微观碰撞危险度以加速和减速程度为依据。
(Perera and Soares, 2015)
提出了一个清晰碰撞危险度,相对航向航速与方位向量的单位向量矢积被分类定义为船舶间碰撞危险度。
危险等级的概念在碰撞预警系统(CAS)中很常见。碰撞预警系统是一个决策支持工具,可以为船员和VTS操作员设计,目的是通过视觉、声觉或提示性信号警示用户船舶碰撞危险的可能性。与避碰系统(缩写也是CAS)不同的是,避碰预警系统更注重碰撞危险的评估和警示,而不是提出避碰操纵方案。
(Baldauf et al., 2011)
提出了一个普遍的碰撞预警框架,提供四个危险等级。一个普遍的对于态势评估的危险模型通常根据安全距离参数、避碰规则、能见度、水域类型和风流情况。
(Baldauf et al., 2015)
继续了上面的研究,并且研究了能否和怎么把空中避碰系统(ACAS)引入到海上避碰中。空中避碰系统包含三个危险等级,作者证实了确实可以将其引入海上。这个转移需要通过对船舶操纵区域的预测。通过重叠的操纵区域来确定碰撞危险的量化数值,从而进行危险评估。
(Bukhari et al., 2013)
建立了一个与碰撞预警系统相关的危险评价方法,通过VTS的雷达数据来计算碰撞危险度。这个碰撞危险度考虑了DCPA、TCPA、罗经度数差(VCD)。这些因素的语义值通过模糊推理系统产生最终的碰撞危险度。
(Simsir et al., 2014)
提出了一个基于人工神经网络的类碰撞预警系统的框架,并意图为狭水道中相互通过的船舶进行设计。它只有一个输出危险等级,对船舶3分钟后位置是否存在碰撞危险进行报告。
(Goerlandt et al., 2015)
提出了一个先进的风险通告碰撞预警系统(RICAS),这个系统中对于会遇的分析与避碰规则、事故发生紧迫程度、偏航程度、含糊情况有关。风险等级的数值与多个参数有关,包括DCPA、TCPA、BCR、BCT、相对方位、范围、时间和能见度。每一个参数都被定义了隶属函数,然后通过模糊推理系统形成最终的风险等级。
(Lopez-Santander and Lawry, 2017)
提出了一个非线性船舶碰撞危险模型,通过调查问卷得到的数据使用序次Probit模型进行统计。得出的结果是一个提供初步风险成本函数的模型,它可以被用在航路规划以及会遇局面下避免碰撞危险的路径优化算法上。
考虑到关于确定碰撞危险度和碰撞预警系统中危险等级的方法的快速发展,船舶领域和这些方法可以进行一些比较。碰撞危险度的优势是可以把多个参数统合成一个参数。碰撞预警系统中的方法通常使用很多的工具(例如模糊推理系统)来确定危险等级。他们都十分灵活并且都不受几何图形的限制。然而这个优点反过来说也是船舶领域的优势,一个几何图形对于船员来说更加直观,船员们通过系统得知船舶附近的空间领域时会十分舒适。此外,船舶领域使得船员能够通过调整领域尺寸并且直接在屏幕上观察领域的改变来配置系统。然而,以上所提到的领域的优势,仅在领域模型足够简单以至于广泛被海事行业理解的前提下。
第六章 总结
文章中提到了很多的船舶领域模型,特别是当今的模型。船舶领域不仅仅在尺寸和形状上不同,而在用途和安全标准上也存在不同。不同的领域考虑的因素往往比一个确切的领域模型更加有意义(后者经常在文献中被过分强调)。
根据最新的文献可以看到领域模型的发展和应用,最新的文献也证明了船舶领域在航海科学中持续发展。
船舶领域的三类确定方法:基于实验统计的方法对特定水域或新水域很有意义,基于解析表达的方法试图更精确的强调一些问题(如船舶动态操纵性和在分道通航中行驶),基于专家知识的方法使用人工智能工具来处理专家知识以更加精准的确定人类直觉的船舶领域。
船舶领域的研究已经覆盖了所有类型的水域,包括开放水域、限制水域、狭水道、冰区等。
此外,一些研究者假定了一个通用的船舶领域,但其实现饱受争议,尤其是在避碰中由于各种参数的动态变化需要经常重新配置而显得很难实现,所以就这种通用模型而言,选择简化的并可以由用户自由配置的模型不失为一个好选择。
尽管船舶领域以前是被用来进行避碰研究和容量分析,其应用的范围也在不断进化。对于避碰而言,自从船舶领域的概念被提出后将近40年,把其引入避碰中只有很小一部分的成功。而基于DCPA和TCPA的安全距离则在实时海事系统中广泛应用,可能是因为其施行和解释的简便性。船舶领域在容量分析中使用的更多,更多样化,不过在这些分析中使用的模型往往是作者为了分析而设计的专用领域而不是已经存在的船舶领域模型。然而,这些已经存在的船舶领域模型被成功应用在基于AIS数据的船舶冲突检测和危险接近检测、处理基于AIS的船舶轨迹以及水道风险分析中。一些先进的船舶领域,例如四元船舶领域被应用在这些方面是十分有意义的。
总而言之,船舶领域在一些比起计算时间和快速决策更看重模型和评估精度的研究中慢慢变得更加流行。
参考文献
Baldauf, M., Benedict, K., Fischer, S., Motz, F., Schr?oder-Hinrichs, J.-U., 2011. Collisionavoidance systems in air and maritime traffic. Proc. Inst. Mech. Eng. Part O J. RiskReliab 3/225, 333–343.
Baldauf, M., Mehdi, R., Deeb, H., Schr?oder-Hinrichs, J.U., Benedict, K., Krüger, C.,Fischer, S., Gluch, M., 2015. Manoeuvring areas to adapt ACAS for the maritimedomain. Sci. J. Marit. Univ. Szczecin 43 (115), 39–47.
Bukhari, A.C., Tusseyeva, I., Lee, B.-G., Kim, Y.-G., 2013. An intelligent real-time multivesselcollision risk assessment system from VTS view point based on fuzzy inferencesystem. Expert Syst. Appl. 40, 1220–1230.
Chang, K.Y., Jan, G.E., Parberry, I., 2003. A method for searching optimal routes withcollision avoidance on raster charts. J. Navig. 56, 371–384.
Chin, H.C., Debnath, A.K., 2009. Modeling perceived collision risk in port waternavigation. Saf. Sci. 10/47, 1410–1416.
Cockcroft, A.N., Lameijer, J.N.F., 2011. A Guide to Collision Avoidance Rules.Butterworth-Heinemann, Oxford, UK.
Coldwell, T.G., 1983. Marine traffic behaviour in restricted waters. J. Navig. 36, 431–444.
Davis, P.V., Dove, M.J., Stockel, C.T., 1980. A computer simulation of marine traffic usingdomains and arenas. J. Navig. 33, 215–222.
Davis, P.V., Dove, M.J., Stockel, C.T., 1982. A computer simulation of multi-shipencounters. J. Navig. 35, 347–352.
Dinh, G.H., Im, N., 2016. The combination of analytical and statistical method to definepolygonal ship domain and reflect human experiences in estimating dangerous area.Int. J. e-Navig. Mar. Econ. 4, 97–108.
Fuji, J., Tanaka, K., 1971. Traffic capacity. J. Navig. 24, 543–552.
Gang, L., Wang, Y., Sun, Y., Zhou, L., Zhang, M., 2016. Estimation of vessel collision riskindex based on support vector machine. Adv. Mech. Eng. 8 (11), 1–10.
Goerlandt, F., Kujala, P., 2014. On the reliability and validity of ship–ship collision riskanalysis in light of different perspectives on risk. Saf. Sci. 62, 348–365.
Goerlandt, F., Montewka, J., 2015. Maritime transportation risk analysis: review andanalysis in light of some foundational issues. Rel. Eng. Syst. Saf. 138, 115–134.
Goerlandt, F., Montewka, J., Kuzmin, V., Kujala, P., 2015. A risk-informed ship collisionalert system: framework and application. Saf. Sci. 77, 182–204.
Goerlandt, F., Montewka, J., Zhang, W., Kujala, P., 2016. An analysis of ship escort andconvoy operations in ice conditions. Saf. Sci. http://dx.doi.org/10.1016/j.ssci.2016.01.004.
Goerlandt, F., St?hlberg, K., Kujala, P., 2012. Influence of impact scenario models oncollision risk analysis. Ocean. Eng. 47, 74–87.
Goodwin, E.M., 1975. A statistical study of ship domains. J. Navig. 28, 328–344.
Hansen, M.G., Jensen, T.K., Lehn-Schi?ler, T., Melchild, K., Rasmussen, F.M.,
Ennemark, F., 2013. Empirical ship domain based on AIS data. J. Navig. 66, 931–940.
IMO, 1972. Convention on the International Regulations for Preventing Collisions at Sea.International Maritime Organization [with amendments adopted from December2009].
IMO, 2007. Adoption of the Revised Performance Standards for Integrated NavigationSystems (INS). Resolution MSC 83/23/Add.3-ANNEX 30.
van Iperen, W.H., 2015. Classifying ship encounters to monitor traffic safety on the Northsea from AIS data. TransNav, Int. J. Mar. Navig. Saf. Sea Transp. 9 (1), 51–58.
Jensen, T.K., Hansen, M.G., Lehn-Schi?ler, T., Melchild, K., Rasmussen, F.M.,Ennemark, F., 2013. Free flow–efficiency of a one-way traffic lane between twopylons. J. Navig. 66, 941–951.
Kao, S.L., Lee, K.-T., Chang, K.-Y., Ko, M.-D., 2007. A fuzzy logic method for collisionavoidance in vessel traffic Service. J. Navig. 60, 17–31.
Krata, P., Montewka, J., 2015. Assessment of a critical area for a give-way ship in acollision encounter. Arch. Transp. 34 (2), 51–60.
Lazarowska, A., 2015. Ship's trajectory planning for collision avoidance at sea based onAnt Colony optimisation. J. Navig. 68, 298–307.
Lazarowska, A., 2016. A new deterministic approach in a decision support system forship's trajectory planning. Expert Syst. Appl. http://dx.doi.org/10.1016/j.eswa.2016.11.005.
Lee, T., Kim, H., Chung, H., Bang, Y., Myung, H., 2015. Energy efficient path planning fora marine surface vehicle considering heading angle. Ocean. Eng. 107, 118–131.
Li, B., Pang, F.-W., 2013. An approach of vessel collision risk assessment based on the D–Sevidence theory. Ocean. Eng. 74, 16–21.
Liu, J., Zhou, F., Li, Z., Wang, M., Liu, R.W., 2016. Dynamic ship domain models forcapacity analysis of restricted water channels. J. Navig. 69, 481–503.
Lopez-Santander, A., Lawry, J., 2017. An ordinal model of risk based on Mariner'sjudgement. J. Navig. 70 (2), 309–324.
Mou, J.M., van der Tak, C., Ligteringen, H., 2010. Study on collision avoidance in busywaterways by using AIS data. Ocean. Eng. 37, 483–490.
Perera, L.P., Oliveira, P., Guedes Soares, C., 2012. Maritime traffic monitoring based onvessel detection, tracking, state estimation, and trajectory prediction. IEEE Trans.Intell. Transp. Syst. 13, 1188–1200. http://dx.doi.org/10.1109/TITS.2012.2187282.
Perera, L.P., Soares, C.G., 2010. Ocean vessel trajectory estimation and prediction basedon extended kalman filter. Second Int. Conf. Adapt. Self Adapt. Syst. Appl. 14–20.
Perera, L.P., Soares, C.G., 2015. Collision risk detection and quantification in shipnavigation with integrated bridge systems. Ocean. Eng. 109, 344–354.
Pietrzykowski, Z., 2008. Ship's fuzzy domain – a criterion for navigational safety innarrow fairways. J. Navig. 61, 499–514.
Pietrzykowski, Z., Uriasz, J., 2009. The ship domain – a criterion of navigational safetyassessment in an open sea area. J. Navig. 62, 93–108.
Pietrzykowski, Z., Wolejsza, P., Borkowski, P., 2016. Decision support in collisionsituations at sea. J. Navig.
http://dx.doi.org/10.1017/S0373463316000746
.
Qu, X., Meng, Q., Suyi, L., 2011. Ship collision risk assessment for the Singapore Strait.Accid. Anal. Prev. 43 (6), 2030–2036.
Rawson, A., Rogers, E., Foster, D., Phillips, D., 2014. Practical application of domainanalysis: port of London case study. J. Navig. 67, 193–209.
Sang, L.-Z., Wall, A., Yan, X.-P., Wang, J., 2015. A novel method for restoring thetrajectory of the inland waterway ship by using AIS data. Ocean. Eng. 110 (Part A),183–194.
Simsir, U., Amasyali, M.F., Bal, M., ?elebi, U.B., Ertugrul, S., 2014. Decision supportsystem for collision avoidance of vessels. Appl. Soft Comp. 25, 369–378.
Smierzchalski, R., Michalewicz, Z., 2000. Modelling of ship trajectory in collisionsituations by an evolutionary algorithm. IEEE Trans. Evol. Comput. 4, 227–241.
Szlapczynski, R., 2013. Evolutionary sets of safe ship trajectories within traffic separationschemes. J. Navig. 66, 65–81.
Szlapczynski, R., 2015. Evolutionary planning of safe ship tracks in restricted visibility.J. Navig. 68, 39–51.
Szlapczynski, R., Szlapczynska, J., 2015. A target information display for visualisingcollision avoidance manoeuvres in various visibility conditions. J. Navig. 68,1041–1055.
Szlapczynski, R., Szlapczynska, J., 2016. An analysis of domain-based ship collision riskparameters. Ocean. Eng. 126, 47–56.
Szlapczynski, R., Szlapczynska, J., 2017. A method of determining and visualizing safemotion parameters of a ship navigating in restricted waters. Ocean. Eng. 129,363–373.
Tam, C.K., Bucknall, R., 2013. Cooperative path planning algorithm for marine surfacevessels. Ocean. Eng. 57, 25–33.
Tam, C.K., Bucknall, R., Greig, A., 2009. Review of collision avoidance and path planningmethods for ships in close range encounters. J. Navig. 62, 455–476.
Tsou, M.-C., Kao, S.-L., Su, C.-M., 2010. Decision support from genetic algorithms for shipcollision avoidance route planning and alerts. J. Navig. 63, 167–182.
Tsou, M.-C., 2016. Multi-target collision avoidance route planning under an ECDISframework. Ocean. Eng. 121, 268–278.
Wang, N., Meng, X., Xu, Q., Wang, Z., 2010. An intelligent spatial collision risk based onthe quaternion ship domain. J. Navig. 63, 733–749.
Wang, N., 2013. A novel analytical framework for dynamic quaternion ship domains.J. Navig. 66, 265–281.
Wang, Y., Chin, H.C., 2016. An empirically-calibrated ship domain as a safety criterion fornavigation in confined waters. J. Navig. 69, 257–276.
Wen, Y., Huang, Y., Zhou, C., Yang, J., Xiao, C., Wu, X., 2015. Modelling of marine trafficflow complexity. Ocean. Eng. 104, 500–510.
Weng, J., Meng, Q., Qu, X., 2012. Vessel collision frequency estimation in the Singaporestrait. J. Navig. 65, 207–221.
van Westrenen, F., Ellerbroek, J., 2017. The effect of traffic complexity on thedevelopment of near misses on the North sea. IEEE Trans. Syst. Man, Cybern. Syst.http://dx.doi.org/10.1109/TSMC.2015.2503605.
Wu, X., Mehta, A.L., Zaloom, V.A., Craig, B.N., 2016. Analysis of waterway transportationin Southeast Texas waterway based on AIS data. Ocean. Eng. 121, 196–209.
Xiao, F., Ligteringen, H., van Gulijk, C., Ale, B., 2015. Comparison study on AIS data ofship traffic behaviour. Ocean. Eng. 95, 84–93.
Xu, X., Geng, X., Wen, Y.Q., 2016. Modelling of ship collision risk index based on complexplane and its realization. TransNav, Int. J. Mar. Navig. Saf. Sea Transp. 10 (2),251–256.
Zhang, J., Zhang, D., Yan, X., Haugen, S., Guedes Soares, C., 2015a. A distributed anticollisiondecision support formulation in multi-ship encounter situations underCOLREGs. Ocean. Eng. 105, 336–348.
Zhang, W., Goerlandt, F., Kujala, P., Wang, Y., 2016a. An advanced method for detectingpossible near miss ship collisions from AIS data. Ocean. Eng. 124, 141–156.
Zhang, W., Goerlandt, F., Montewka, J., Kujala, P., 2015b. A method for detectingpossible near miss ship collisions from AIS. Ocean. Eng. 107, 60–69.
Zhang, S.-K., Liu, Z.-J., Wu, Z.-L., Shi, G.-Y., 2016b. AIS trajectories simplification andthreshold determination. J. Navig. 69, 729–744.
Zhao, J., Wu, Z., Wang, F., 1993. Comments on ship domains. J. Navig. 46, 422–436.
Zhu, X., Xu, H., Liu, J., 2001. Domain and its model based on neural networks. J. Navig.54, 97–103.

















 894
894

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









