







很多资料上提供的两直线相交求点问题一般都是基于二维空间的,而且是直接使用坐标系进行求解。实际上知道二维空间中的求法(使用坐标系进行求解的),要想从中推导到三维空间中的求法是不容易的。在进行几何问题求解时,除了使用坐标系求解问题外,使用向量求解问题也许更容易。向量空间是隐藏坐标系的,使用向量空间求解几何问题比使用坐标系求解问题更好的是,它将问题的解法提升到了一个宏观的高度,并且有了基于向量空间的解法,那么可以把这个解法直接延伸到n维都很容易。
假设有两直线l1和l2,它们的参数方程如下所示:(向量v1,v2均为单位向量)
l1: P1 = R1 + t1v1;
l2: P2 = R2 + t2v2.平行:v1×v2 = 0;
异面:(R2-R1, v1, v2) ≠ 0;
相交:(R2-R1, v1, v2) = 0且v1×v2 ≠ 0。
若相交,那么需要求出两直线的交点。如下图所示:
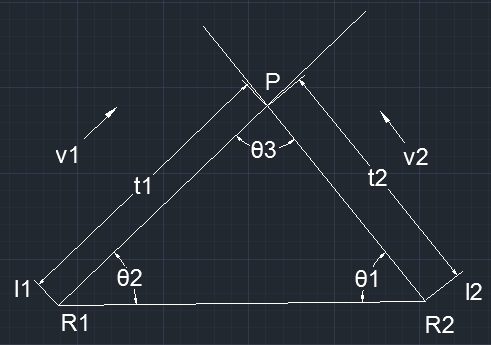
两直线交点为P,|R1P| = t1,|R2P| = t2。根据三角形正弦定理,△R1R2P中,t1/sinθ1 = t2/sinθ2 = |R1R2|/sinθ3,要求交点,可先求得t1或t2,t1,t2的值可通过正弦定理求得。两向量夹角的正弦值是隐藏在向量外积的长度上的,如上图所示,θ3是向量v1,v2的夹角,则|v1×v2| = sinθ3。
可立方程:(R1-R2)×v2 = t1(v2×v1),因为|(R1-R2)×v2| = |R1R2|sinθ1。可求得:t1 = (R1-R2)×v2/(v2×v1),同理,可求得t2 = (R2-R1)×v1/(v1×v2),将t1代入l1方程即可得到交点P,或将t2代入l2方程也可得到交点P,两者只需求其一。
但是在计算机中,由于同一直线,它的参数方程可有多种描述(起点可选不同的点,或者单位方向向量可不同),参数t可为正值也可为负值。所以需要将对两直线相交的情况分为四种,上述是第一种情况,第二种是只需对l1做反向延长线进行求交,第三种是只需对l2做反向延长线进行求交,第四种是需要对l1和l2均做反向延长线进行求交。
第二种情况和第三种情况可视为同一种情况,这里只对第三种情况进行分析。第三种情况如下图所示:
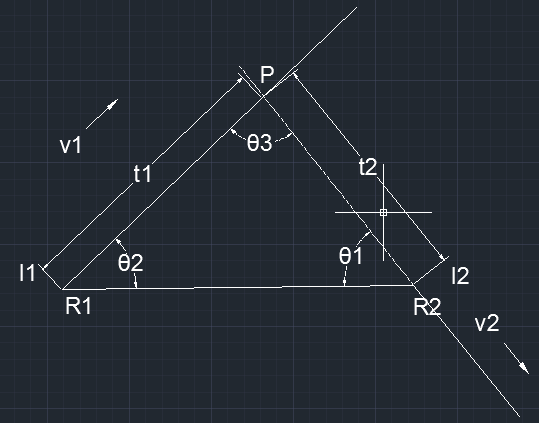
则相对第一种情况,在这种情况下,t1' = t1 = (R1-R2)×v2/(v2×v1), t2' = t2 = (R2-R1)×v1/(v1×v2),只不过t1‘的值为正值,t2’的值为负值。
第三种情况如下图所示:
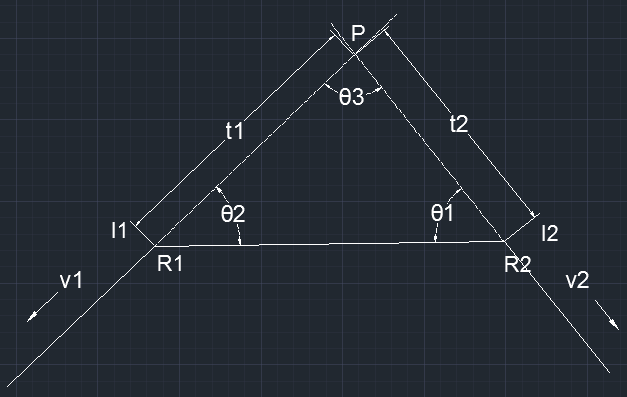
则相对第一种情况,在这种情况下,t1'‘ = t1 = (R1-R2)×v2/(v2×v1), t2'’ = t2 = (R2-R1)×v1/(v1×v2),只不过t1''和t2''的值均为负值。
综上四种情况,t1和t2的求解公式都是一样的,即t1 = (R1-R2)×v2/(v2×v1),t2 = (R2-R1)×v1/(v1×v2)。

















 2305
2305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









