









由参数l,r,b,t,n,f定义的透视投影矩阵的推导困惑了我差不多一个多礼拜,这几天几乎是天天都在思考这个问题,昨天晚上3点多钟我突然醒了,然后我又开始想这个问题,结果终于让我给想通了,于是我赶紧起床把这个思路记在了草稿纸上,还专门照了张照片作证。

为了解决这个问题,前几天我专门发了两篇帖子求答案,结果知网上的竟然沉掉了。而在csdn上也没有得到答案(质疑有关透视投影矩阵的推导)。幸亏我自己还是解决了这个问题。
下面推导的是OpenGL中的透视投影矩阵。
已经知道由参数fovy,aspect,n,f定义的透视投影矩阵为:(有关这块的推导可见《3d graphics for game programming》 2.4.3 derivation of projection matrix,讲得非常详细)
POpenGL=
⎛⎝⎜⎜⎜⎜⎜⎜⎜cot(fovy2)aspect0000cot(fovy2)0000−f+nf−n−100−2nff−n0⎞⎠⎟⎟⎟⎟⎟⎟⎟
那么再看另一种投影参数l,r,b,t,n,f,上面矩阵中:
cot(fovy2)=2nt−b.
因为参数l,r是对应视见空间中x轴的坐标,b,t对应视见空间中y轴的坐标,如果l=-r并且b=-t,那么由这种参数定义的透视投影矩阵就是:
P′OpenGL=
⎛⎝⎜⎜⎜⎜⎜2nr−l00002nt−b0000−f+nf−n−100−2nff−n0⎞⎠⎟⎟⎟⎟⎟
而官方的透视投影矩阵是:
实际上这个矩阵是由两步转换完成的,第一步是进行矩阵
那些说这个透视投影没有做平移这一步操作,我可以100%跟你说你是错的!
下面我来解释为什么进行了平移操作。
来张示意图:
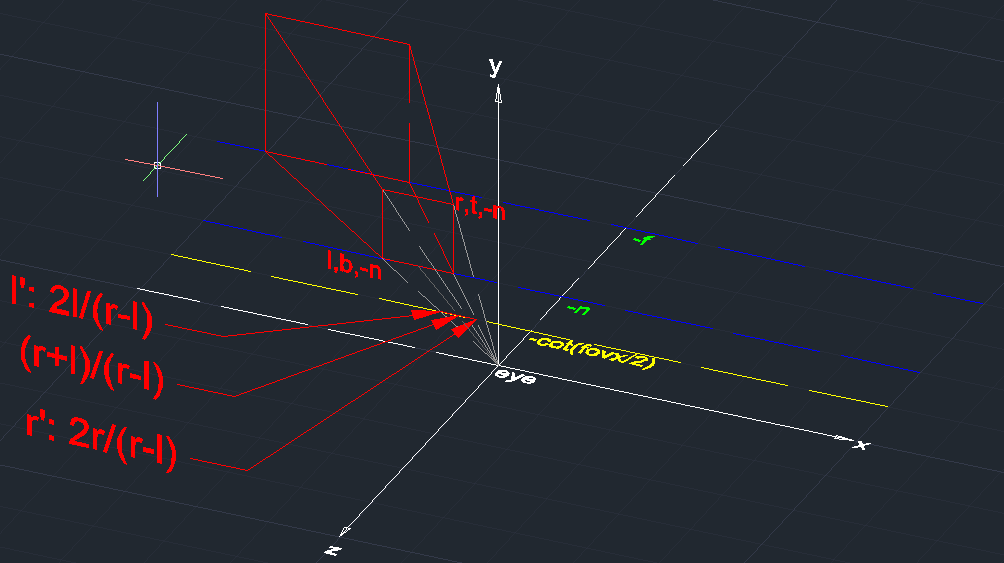
这个是视见空间中的示意图,因为存在l≠-r或b≠-t的情况,所以这里我故意没把近裁剪平面中心画在z轴上。 示意图上由红线绘制的立方体才是由l,r,b,t,n,f参数定义的视锥体,其中远裁剪平面上的四个点分别对应原点eye经过近裁剪平面上四个点的延长线与z=-f平面的交点,注意这个视锥体是不规则的!然后图中的标注l’, r’是近裁剪平面点(l,b,-n)和点(r,b,-n)x轴上的分量在 z=−cot(fovx2) 上的投影, l′=2lr−l , r′=2rr−l ,l’和r’的中心值是 r+lr−l ,同理近裁剪平面上点(r,b,-n)和点(r,t,-n)y轴上的分量在 z=−cot(fovy2) 上的投影, b′=2bt−b , t′=2tt−b ,b’和t’的中心值是 t+bt−b 。 图中的视锥体通过 P′OpenGL 透视变换之后得到的是规则的正方体(左下角顶点 (2lr−l,2bt−b,1) ,右上角顶点 (2rr−l,2tt−b,−1)) ,最终要把它转换成cvv(canonical view volume,正规可视化空间),则需要进行T平移转换,也就是平移 (−r+lr−l,−t+bt−b,0) 。得证。















 2092
2092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









