







一、四个坐标系统
1. 四个坐标系简介:
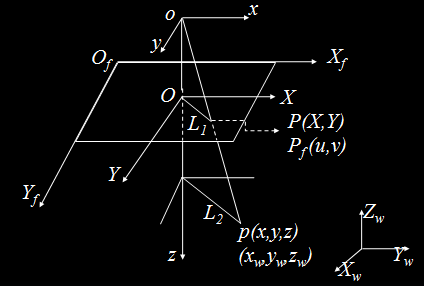
- 世界坐标系(Xw,Yw,Zw):也称真实或现实世界坐标系,或全局坐标系。它是客观世界的绝对坐标,由用户任意定义的三维空间坐标系。一般的3D场景都用这个坐标系来表示。
- 摄像机坐标系(xoy):以小孔摄像机模型的聚焦中心为原点,以摄像机光轴为oz 轴建立的三维直角坐标系。x,y 一般与图像物理坐标系的X,Y平行。
- 图像物理坐标系:其原点为透镜光轴与成像平面的交点,X 与Y 轴分别平行于摄像机坐标系的x与y 轴,是平面直角坐标系,单位为毫米。
图像像素坐标系[计算机图像(帧存)坐标系]:固定在图像上的以像素为单位的平面直角坐标系,其原点位于图像左上角, Xf,Yf
平行于图像物理坐标系的X 和Y轴。对于数字图像,分别为行列方向。四个坐标系系统图如下:
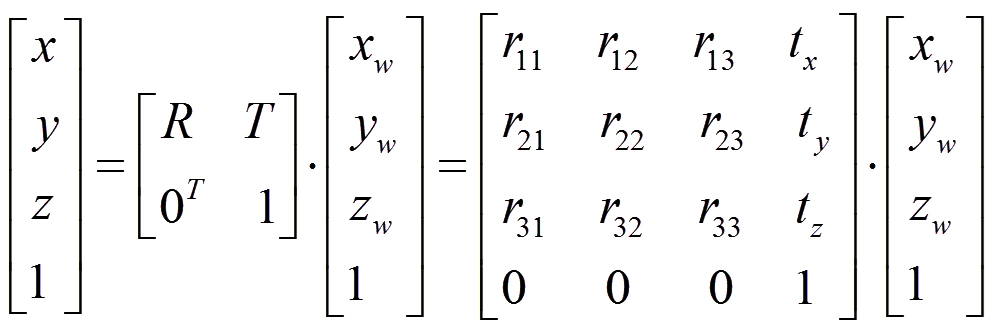
2. 各个坐标系关系:
- 世界坐标系与摄像机坐标之间的转换关系
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2168
2168

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









