






今天介绍一下惯性导航传感器加速度计,加速度计是测量物体加速度的传感器,通过对加速度a的测量,积分后可以得到物体运动的速度v,二次积分后可以得到物体的位移s,故可以为飞行器进行导航。
常用加速度计可以分为两类:一类是线性加速度计,一类是摆式加速度计。线性加速度计的测量原理和高中物理实验测量加速度相似,通过打点的方式,测量两点之间的距离计算出加速度。摆式加速度计是通过测量物体所受惯性力ma,而后得到加速度,示意图如下:
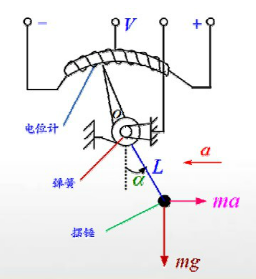
由力矩平衡方程可知:
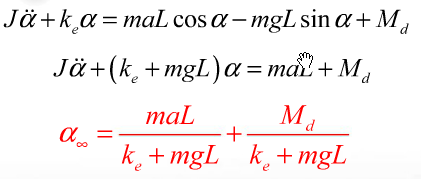
式中Ke表示弹簧的弹性系数,α 表示摆偏角,L表示摆长,Md表示干扰力矩。这里假定在测量角变化非常小,几乎可以忽略不计,即α =0,sinα =0,cosα =1,系统稳定后,滑轮的角速度为0,所以Jα=0。
为了方便计算,我们希望摆偏角α与测量的加速度a成线性,线性条件为Md《maL,这样就可以忽略干扰力矩的影响。
下面来进行这种摆式加速度计的可行性分析:
飞机导航加速度计的测量精度一般在10^(-5)以上,假设干扰力矩为0.1g/cm,则ML>10^(4),这在工程上很难实现。
惯性导航对加速度计的要求:
(1)灵敏限小:10^(-5)g以下或10^(-7)~10^(-8)
(2)摩擦干扰小
(3)量程大:10^(-6)g~12g或20g















 700
700

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









