









上周考完了统计信号处理,这几天过得属于是浑浑噩噩了,还是得逼自己一把。之前看过一部分惯导的相关知识,也从网上搜刮到不少仿真代码,不过还是得等我把理论整明白了再解读一下吧。本篇博客作为一个前导,主要梳理一下惯导的相关知识概念。
INS(Inertial Navigation System) 惯性导航系统是一种利用安装在运载体上的陀螺仪和加速度计来测定运载体位置的一个系统。
-
功能
测量载体相对于惯性坐标系的加速度、角速度,通过二次积分可以得到载体的位移信息 -
系统组成
加速度计

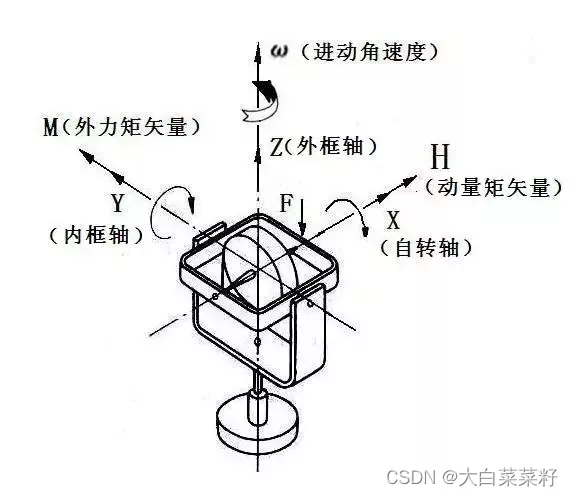
陀螺仪
计算机
-
系统分类
平台式惯导系统:一个三轴空间平台,2、3个高精度陀螺仪以及三个高精度加速度计,一部数字计算机等
捷联式惯导系统:三个高精度陀螺仪以及三个高精度加速度计且直接与机体链接
捷联型优点:陀螺仪动态范围大、导航计算量大、结构简单、体积小、重量轻、成本低等。 -
误差分析
三类误差:静态、动态、随机误差
误差会随着时间增加而累加 -
初始对准
由于测量的是加速度,所以需要进行二次积分操作,所以需要知道初始值,包括初始位置、初始速度,初始姿态。
对准一般分两步进行:粗对准、精对准(暂时不展开) -
惯导的优点
依靠自身测量信息进行连续定位;
不需要接收外部信息,不受外界干扰;
不向外辐射能量,具有隐蔽性;
可同时确定载体位置、速度和姿态信息。
同时也必须介绍一下掌握惯导原理(主要针对捷联型惯导)需要掌握的基础知识:
- 惯导系统中的常用坐标系(是不是研究星载的人大部分都被很多坐标系的恐惧支配过😄)
- 惯性坐标系—i系:以太阳为中心的日心惯性系;以地球为中心的地心惯性系
- 地球坐标系—e系:坐标原点取地球中心,Z轴指向北极,X轴本初子午面与赤道交线,满足右手定则
- 载体坐标系—b系:坐标原点取载体质心,Z轴指向侧方,X轴指向前方,Y轴指向上方,满足右手定则
- 地理坐标系—t系:东北天坐标系,三轴没有明确的规定,满足右手定则,多用于飞机和远距离飞行的巡航导弹
- #目标方位坐标系—d系:主要用于短程、战术导弹的惯导系统,可以简化导航方程。“大圆坐标系”
导航坐标系:常用的是地理坐标系和大圆坐标系
平台坐标系——P系:用来模拟导航坐标系
不是星载的话,感觉主要研究东北天地理坐标系与载体坐标系之间的转换就可以了(一家之言)。
- 相关数学知识
- 反对称阵及其矩阵指数函数
- 方向余弦阵与等效旋转矢量
- 方向余弦阵与欧拉角的关系
- 方位余弦阵微分方程及其求解
- 状态矩阵的即时更新:
- 欧拉角法(三参数法)
- 方位余弦法(九参数法)
- 四元数法(四参数法)
- 等效旋转矢量微分方程及其泰勒级数解
- 相关物理知识
- 平台的表观运动
- 载体的运动加速度
- #地球形状与重力场相关知识
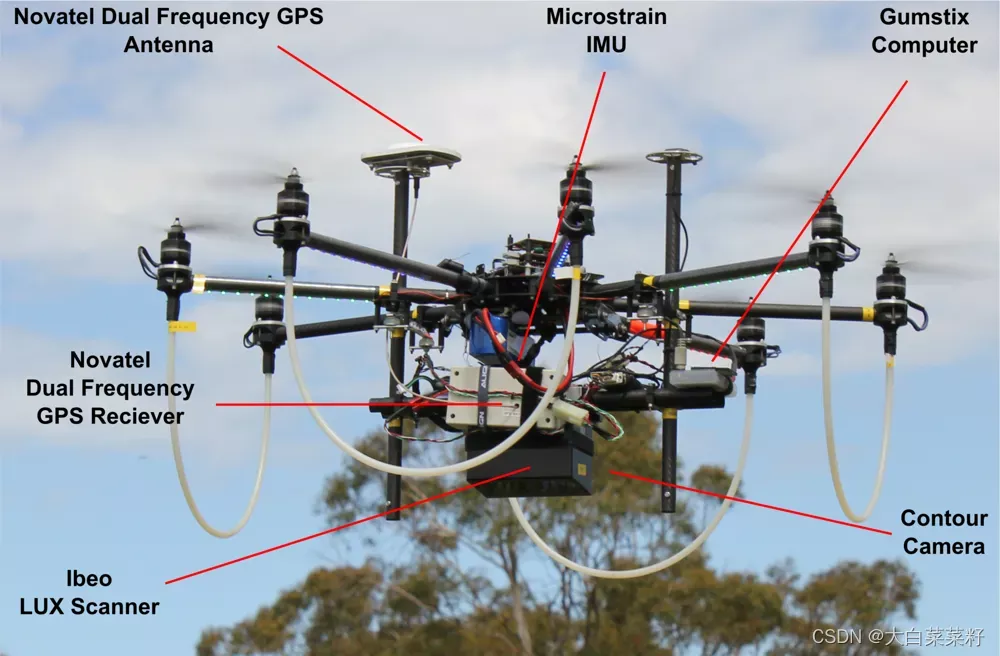
进一步的研究主要是利用多传感器进行数据融合进而实现组合导航
- 组合导航
- 惯性/卫星
- 惯性/激光雷达
- 大气/惯性系统的信息融合
- 多传感器组合导航:联邦滤波器
- 多尺度综合导航:以小波变换为桥梁,分析信号的不同尺度
- 线性系统估计
- 卡尔曼
- 平方根滤波
- UDU’分解滤波
- 非线性系统
- 拓展卡尔曼
- 无迹卡尔曼
- 粒子滤波
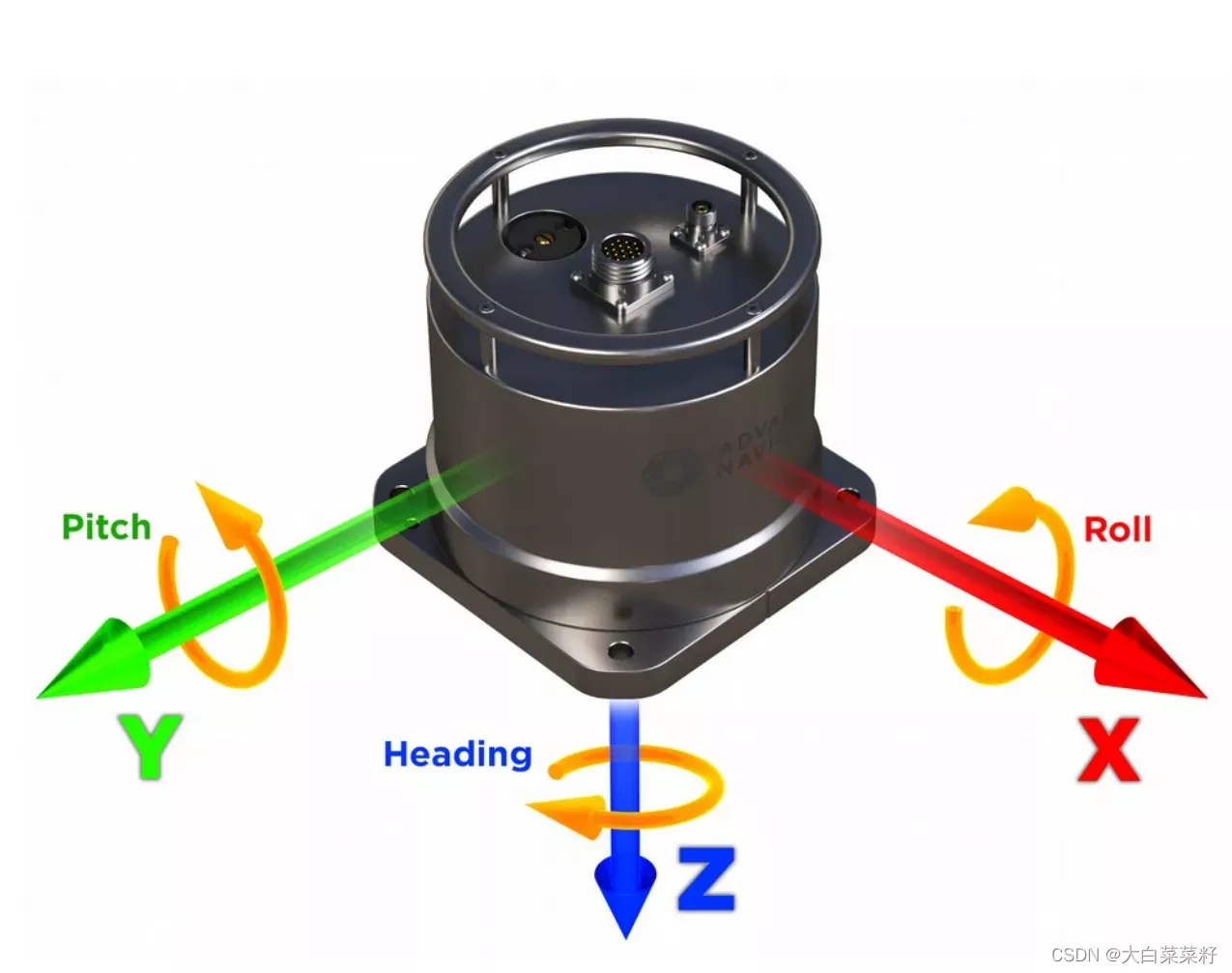
IMU(Inertial measurement unit) 可以获得载体的姿态、速度和位移信息,被广泛用于汽车、机器人领域,也被用于需要用姿态进行精密位移推算的场合,如潜艇、飞机等惯性导航设备中。美国IEEE协会将惯性测量单元定义为“无需外部参考的可测量三维线运动及角运动的装置”。在INS的下游民用市场,惯性传感器的应用涵盖了大地测量、石油钻井、电子交通、汽车安全、消费电子等领域,其中MEMS惯性测量传感器应用较为广泛。
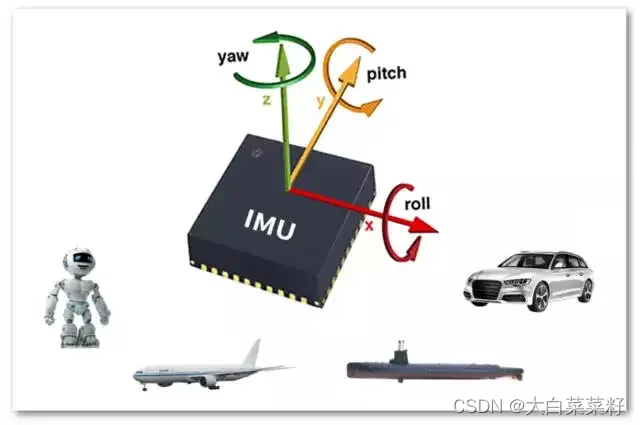
市面上存在的IMU主要以6轴和9轴为主。6轴包括一个三轴加速度计,一个三轴陀螺仪;9轴IMU则多了一个三轴的磁力计。加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。一般而言,IMU要安装在被测物体的重心上。 至于INS与IMU的区别,可以认为是IMU是INS的简化版,或者是INS系统的一部分,总之测量原理是一样的,后续数据解算过程应该是一致的。
参考文献
《捷联惯导算法与组合导航原理讲义》 严恭敏 西工大
《组合导航及其信息融合方法》 林雪原
《惯导导航基本原理》 刘保中
##列了下相关知识点,应该不会有人认为我在水博客吧🙊🙊🙊
















 7252
7252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









