







文章目录
前情回顾
1海里=1.8KM
1海里对应经纬度变化为1角分
加速度计应用的现状
惯性导航未来发展主要取决于器件,器件决定系统
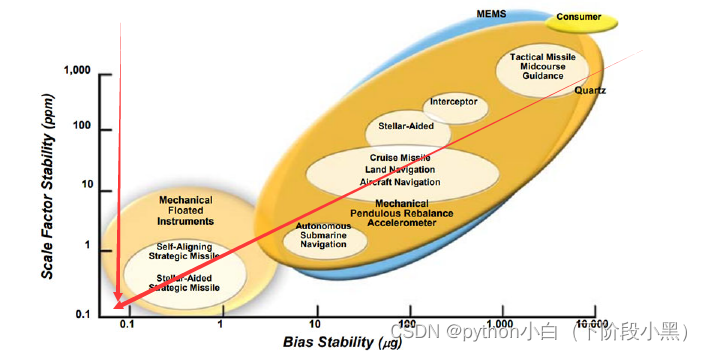
横轴表示零偏稳定性/加速度计零偏误差,越往左边精度越高,其表示静态误差,静止不动的时候就能观测出来;纵轴为比例因子=输出/输入,比例因子为动态误差,在静止不动的时候看不出来。图中红线部分指向,为精度变高的方向。
加速度计的明天—近期应用
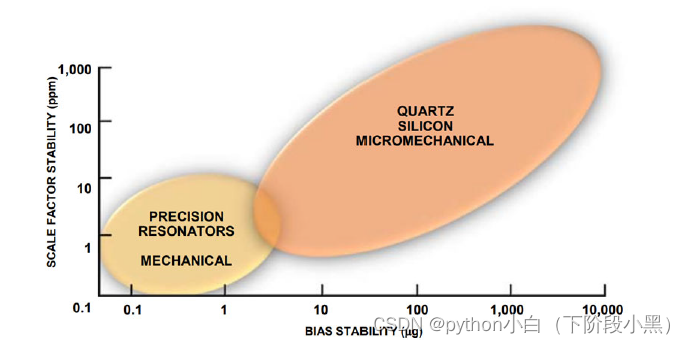
对于不远的将来,可以看到MEMS有非常广阔的舞台
加速度计的未来
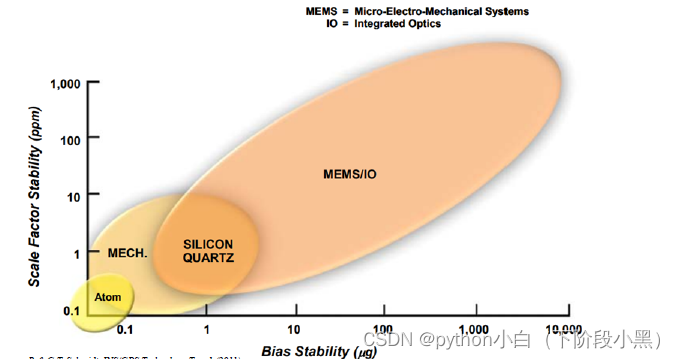
可以看到,未来的MEMS加速度计甚至可以达到战略级的1微g水平
陀螺仪的现状
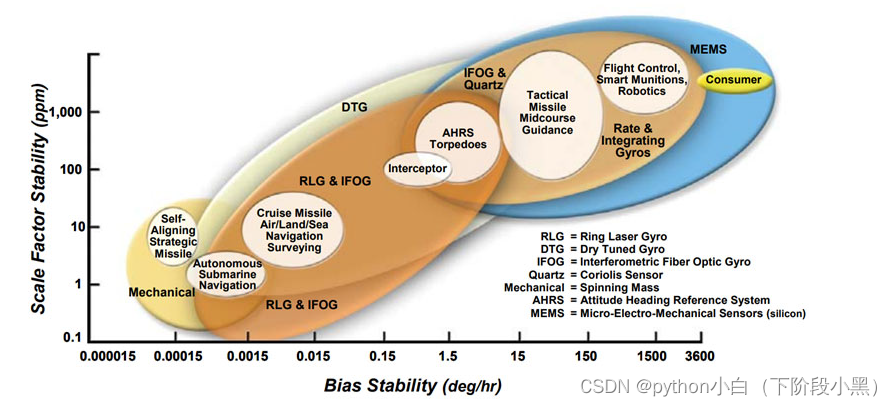
陀螺仪的明天
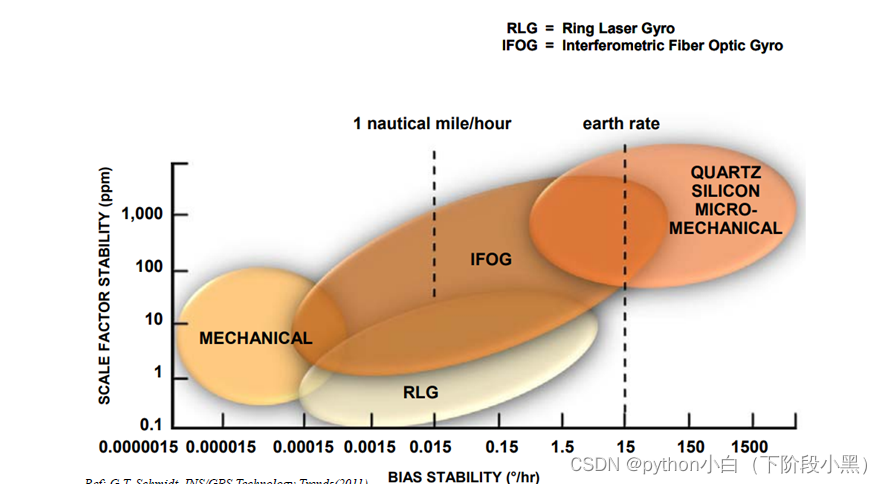
可以看到,中间的光纤陀螺在逐渐替代激光陀螺
陀螺仪的未来
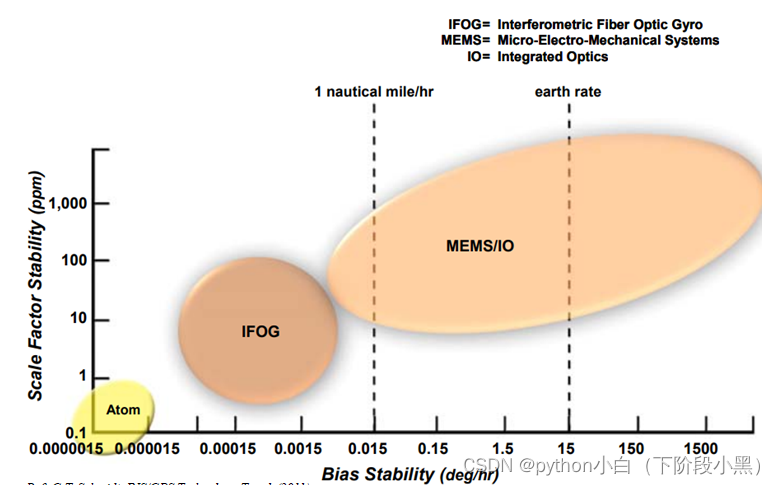
未来,光纤陀螺完全取代了激光陀螺,且MEMS在中高端都有优势
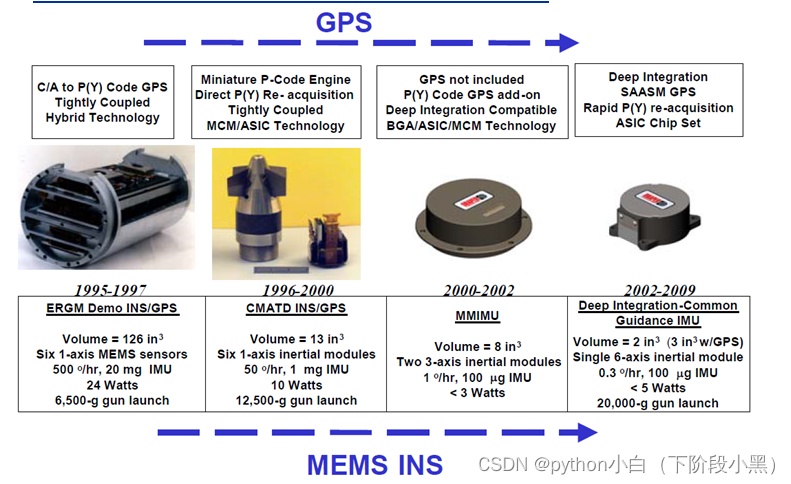
INS/GPS制导系统的发展
惯性导航技术的应用
军用和航空航天
潜艇(惯导+重力/地磁匹配)
弹道导弹(惯导+末端制导)
巡航导弹(惯导+地形匹配)
智能弹药(JDAM)
专业应用
航天
- 卫星姿态控制(陀螺定姿+ 星敏感器)
航空 - 飞机导航
- 飞机姿态控制
移动测图(MMS) - 定位定姿系统(
POS)
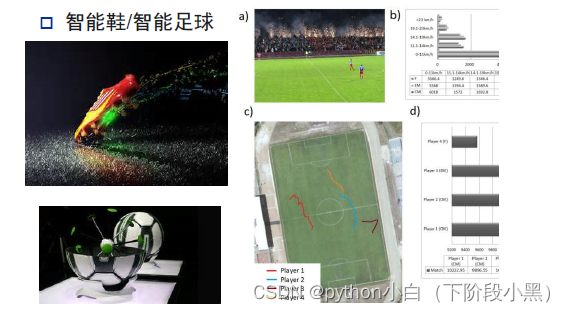
日常应用
惯性导航的发展趋势
高端:原子陀螺和加速度计
低端:MEMS惯导
组合导航:GPS,WiFi,匹配定位


















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











