







1、为什么需要用到观测器
控制原理中的系统框图,往往都是假设反馈状态为理想值。但在工程实践中,这个是做不到的。
一般我们采用传感器测量控制的反馈状态,而传感器的测量值,存在几个问题:
-
- 噪声;
- 滤波器或系统带来的衰减;
- 相位滞后(滤波或采样);
为了让反馈的状态尽可能接近理想值,引入观测器技术。
2、观测器的优缺点
观测器可以解决哪些问题:
-
- 提高传感器的数据精度,减小相位滞后,从而提升控制系统性能;
- 可观测出扰动信号(常见的如ADRC中的扩张状态观测器);
- 能够间接测量信号,如利用位置传感器数据,观测出加速度数据,不需要安装一个加速度传感器;
- 减小采样延迟,如电机控制中,一般速度环的采样率低于电流环,在速度控制中引入了相位滞后到速度反馈中,如果采用观测器,让速度环以电流环更新率运行,则可以消除部分滞后;
观测器的缺点:
-
- 增加了控制系统的复杂性,需要更多的计算资源(在如今的处理器能力下,这个缺点可以忽略不计);
- 与传感器的数据比,观测器数据结果鲁棒性差,如被控对象的参数变化过大,就会导致观测器数据不稳定;
3、如何得到观测器?
为了得到理想的反馈状态,即控制系统中的。
直觉上有两种方法:
方法一,在传感器模型后面加个传感器模型的逆函数,一般传感器可以认为是一个低通模型,
逆函数就是:

实际是不可行的,其逆函数是一个微分项,会放大噪声的影响;
方法二,采用一个完美模型,控制输入输入给完美的模型,得到理想的反馈。实际也不可行,因为一般模型中至少包含了一个积分项,这样模型有一点点误差就会使反馈产生漂移。
仔细分析两种方法,第一种方法,低频特性好,其高频特性差,第二种方法恰恰相反,其低频性能差,高频特性好,所以我们可以进行互补。
本质上来说,从滤波器的角度去理解,观测器就是一个低通滤波乘以传感器输出,加上模型输出乘以一个高通滤波。不过常用的还是回路结构设计。
4、luenberger观测器
包含了:
-
- 传感器输出;
- 控制输入;
- 估计的被控对象模型;
- 估计的传感器模型;
- 观测补偿器;
结构如下:

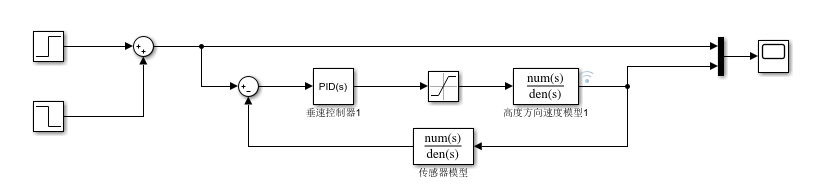
5、仿真实验
验证观测器是否能减小相位滞后的影响,提升系统性能。
以多旋翼的高度方向的速度模型为例,输入为油门PWM值,输出为垂直方向的速度。
理想状态下:


在上面的仿真中,我们用系统的实际状态作为反馈变量,实际并不可能做到。所以接下来,我们将反馈变量加入一个单极点的低通滤波器,截止频率为3Hz。

图中可以看出,超调变大了,约1.7,系统输出有超调和一点振铃,说明系统处于临界稳定,同样的增益,对于回路的相位滞后来说,太大了。而这个相位滞后,是由于测量带来的。
以上,说明如果传感器测量得到的反馈数据有大的相位滞后,就会使得系统性能降低,这个时候只能靠减小PID的增益来保持系统稳定,被迫接受低水平的性能。
观测器可以有效解决该问题。


可以看出,此时系统的响应曲线与理想反馈的响应曲线基本一致。能够有效解决传感器相位滞后问题。
以后再讲讲观测器的干扰估计和间接测量功能。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









