







1.引言

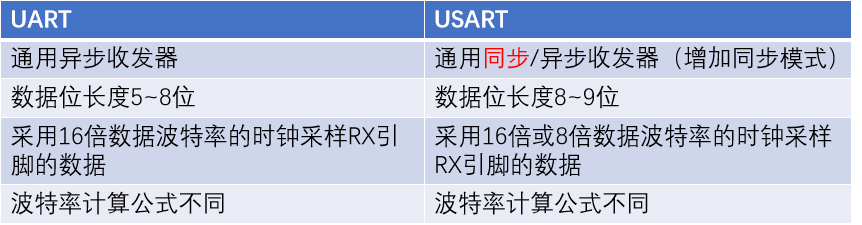
USART(Universal Synchronous/Asynchronous Receiver/Transmitter),是通用同步/异步串行接收/发送器。与UART相同点:均存在异步模式、多处理通信、智能卡功能、IrDA红外功能。
USART与UART的区别在于:
- USART多支持一个同步模式;
- 在异步模式下,等同于UART;
- 在同步模式下,可当做SPI来用,比如用USART来驱动SPI设备;
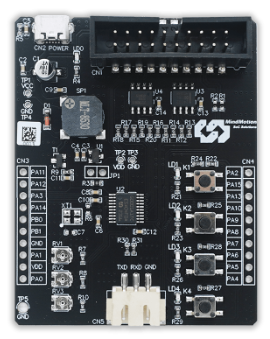
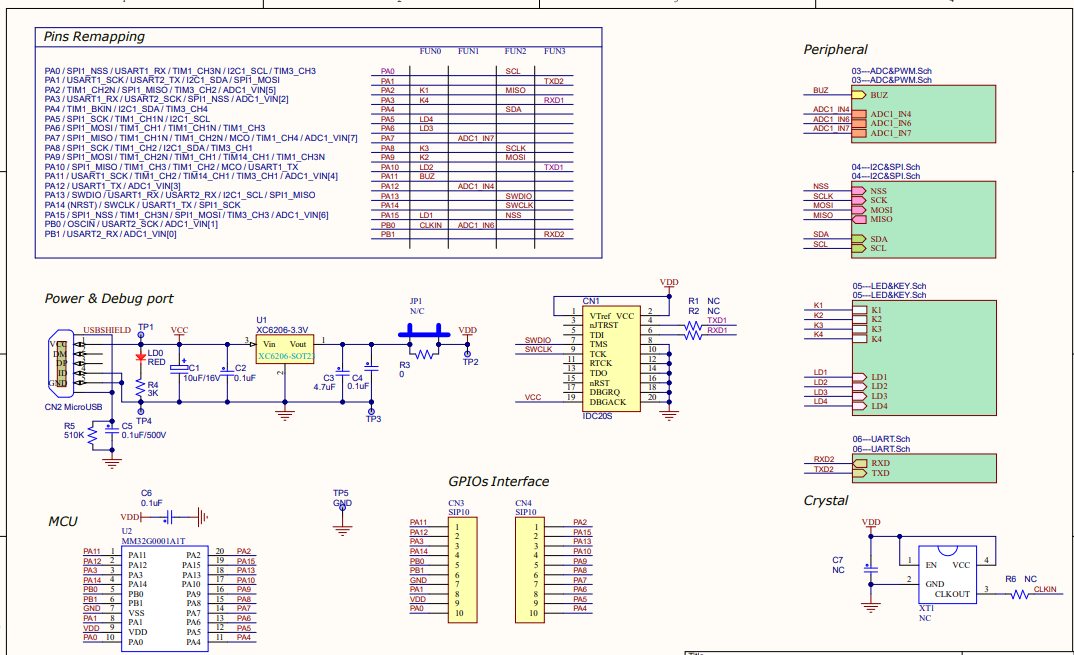
MM32G0001使用高性能的 Arm® Cortex-M0 为内核的 32 位微控制器,最高工作频率可达 48MHz,内置高速存储器,丰富的增强型 I/O 端口和多种外设。含16KB Flash,2KB SRAM。
其电路图如下图所示:
本实验基于MINI-G0001开发板,实现usart三个样例。
2.实验原理

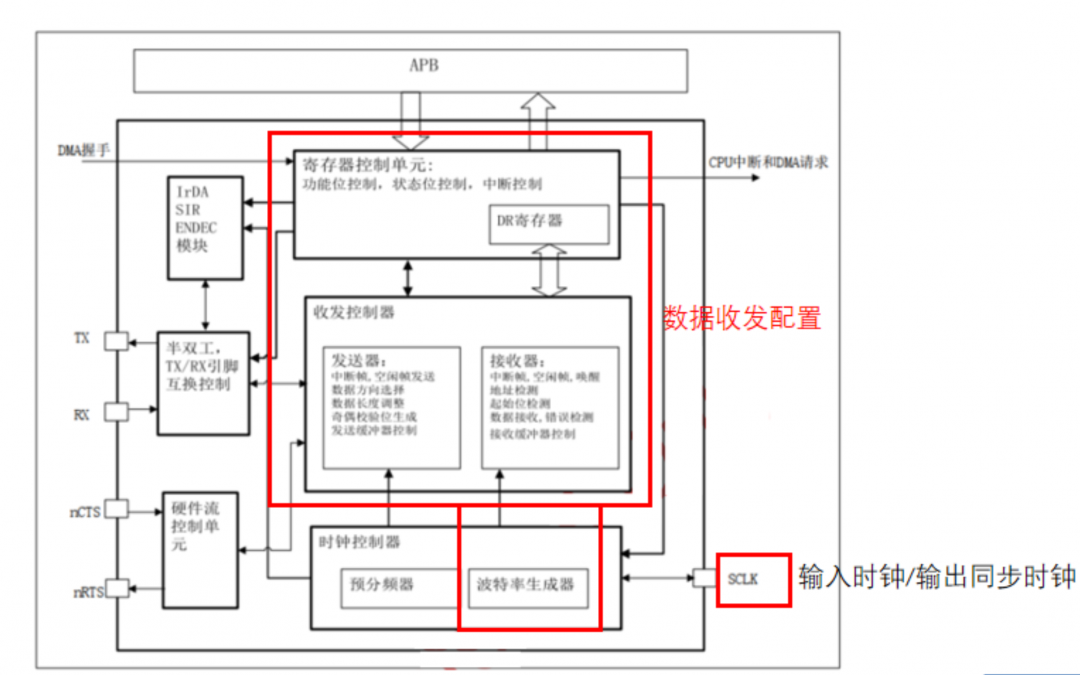
USART结构框图:
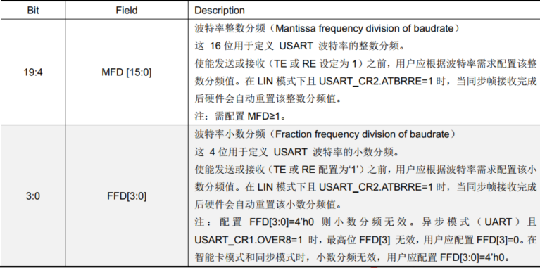
波特率配置公式不同:
- 异步通信模式:


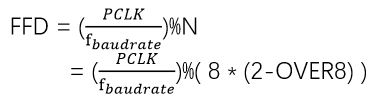
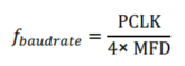
- 同步通信模式:

/* Set usart synchronous baudrate. */
void USART_SetBaudrateSync(USART_Type * USARTx, USART_SyncBaudrate_Type * sync)
{
USARTx->BRR &= ~(USART_BRR_FFD_MASK | USART_BRR_MFD_MASK);
USARTx->BRR |= USART_BRR_MFD( (sync->ClockFreqHz / sync->BaudRate) / 4u);
}
/* set usart asynchronous baudrate. */
void USART_SetBaudrateAsync(USART_Type * USARTx, USART_AsyncBaudrate_Type * async)
{
USARTx->BRR &= ~(USART_BRR_FFD_MASK | USART_BRR_MFD_MASK);
uint8_t N = 8u * (2u - async->OverSampling);
USARTx->CR1 |= USART_CR1_OVER8(async->OverSampling);
uint32_t temp = async->ClockFreqHz / async->BaudRate;
USARTx->BRR |= USART_BRR_MFD( temp / N ) | USART_BRR_FFD( temp % N );
}
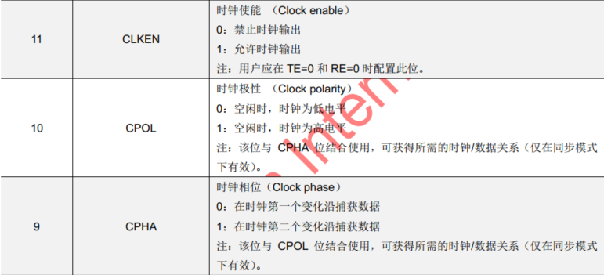
同步时钟:
在USART使用同步模式时,数据传输需要一条时钟线CLK及一条数据线
同步模式支持主模式和从模式:主模式时使用内部波特率生成器生成的时钟,同时输出时钟;从模式时由SCLK引脚输入时钟。
USART数据帧:
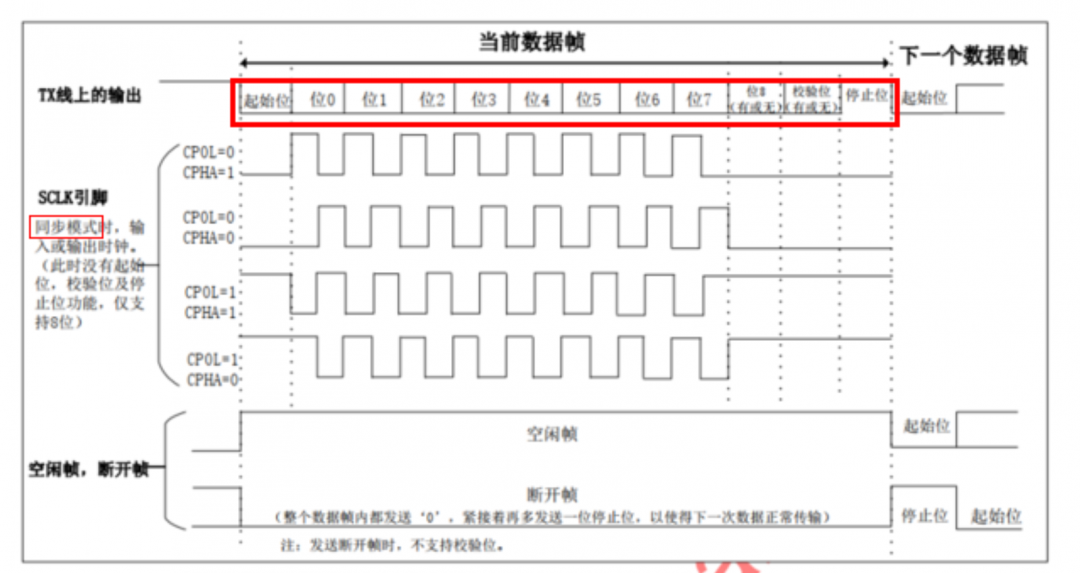
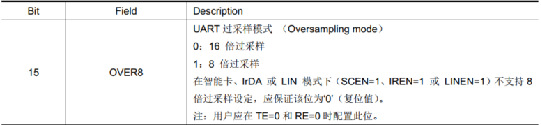
USART 内置检测电路检测一帧数据的开始,并对 RX 引脚进行采样, USART 采用 8 或 16 倍数据波特率的时钟采样 RX 引脚的数据。
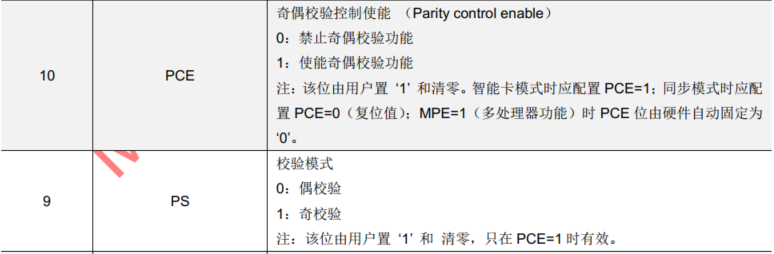
奇偶校验:
偶校验: 校验位加上数据中’1’的总数为偶数
奇校验: 校验位加上数据中’1’的总数为奇数
- 配置 USART_CR1 寄存器中的 PCE 位为’1’来使能奇偶校验控制,PS 位用来选择奇校验或偶校验
3.软件设计

配置引脚
void BOARD_InitPins(void)
{
/* PA12 - USART_TX. */
GPIO_Init_Type gpio_init;
gpio_init.Pins = GPIO_PIN_12;
gpio_init.PinMode = GPIO_PinMode_AF_PushPull;
gpio_init.Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio_init);
GPIO_PinAFConf(GPIOA, gpio_init.Pins, GPIO_AF_1);
/* PA3 - USART_RX. */
gpio_init.Pins = GPIO_PIN_3;
gpio_init.PinMode = GPIO_PinMode_In_PullUp;
gpio_init.Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio_init);
GPIO_PinAFConf(GPIOA, gpio_init.Pins, GPIO_AF_1);
}
开启时钟
/* USART. */
RCC_EnableAPB1Periphs(RCC_APB1_PERIPH_USART1, true);
RCC_ResetAPB1Periphs(RCC_APB1_PERIPH_USART1);配置USART
/* DEBUG UART. */
#define BOARD_DEBUG_USART_PORT USART1
#define BOARD_DEBUG_USART_BAUDRATE 9600u
#define BOARD_DEBUG_USART_FREQ CLOCK_APB1_FREQ
4.实验样例

usart_basic
使用异步模式,与串口通信工具进行数据收发,主函数如下:
int main(void){
uint8_t c;
BOARD_Init();
app_usart_init();
app_usart_putstr((uint8_t *)"\r\nusart_basic example.\r\n");
while (1){
c = app_usart_getchar();
app_usart_putchar(c);}}usart_rx_interrupt
每当键入,LED会闪灯
int main(void)
{
BOARD_Init();
app_usart_init();
while (1){}
}
/* Initialization USART asynchtonous mode. */
void app_usart_init(void){
/* Initialization USART asynchronous mode. */
USART_InitAsync_Type usart_init;
usart_init.EnableSwapTxRxXferSignal = false;
usart_init.Parity = USART_Parity_None;
usart_init.StopBits = USART_StopBits_1;
usart_init.WordLength = USART_WordLength_8b;
usart_init.XferMode = USART_XferMode_RxTx;
usart_init.XferSignal = USART_XferSignal_Normal;
/* Set USART asynchronous baudrate. */
USART_AsyncBaudrate_Type usart_baudrate;
usart_baudrate.BaudRate = BOARD_DEBUG_USART_BAUDRATE;
usart_baudrate.ClockFreqHz = BOARD_DEBUG_USART_FREQ;
usart_baudrate.OverSampling = USART_OverSampling_16;
USART_InitAsync(BOARD_DEBUG_USART_PORT, &usart_init);
USART_SetBaudrateAsync(BOARD_DEBUG_USART_PORT, &usart_baudrate);
USART_EnableInterrupts(BOARD_DEBUG_USART_PORT, USART_STATUS_RX_NOTEMPTY, true);
NVIC_EnableIRQ(BOARD_DEBUG_USART_IRQn);
USART_Enable(BOARD_DEBUG_USART_PORT, true); /* Enable USART. */}usart_tx_interrupt
观察到串口输出多遍键入的字符
void app_usart_putstr_init(uint8_t c)
{
/* prepare the buffer. */
for (uint32_t i = 0u; i < APP_USART_TX_BUFF_LEN; i++)
{
app_usart_tx_buff[i] = c;
}
app_usart_tx_buff_idx = 0u;
/* enable the tx interrupt to transmit the buffer. */
USART_EnableInterrupts(BOARD_DEBUG_USART_PORT, USART_STATUS_TX_EMPTY, true);
}/* USART get data. */
uint8_t app_usart_getchar(void)
{
while ( 0u == (USART_STATUS_RX_NOTEMPTY & USART_GetStatus(BOARD_DEBUG_USART_PORT) ) )
{
}
return USART_GetData(BOARD_DEBUG_USART_PORT);
}---------------------
作者:春娇霹雳娃
链接:https://bbs.21ic.com/icview-3318424-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。















 2515
2515











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









