









 本文介绍了工业相机中感光元件尺寸的两种标示方法——光学格式和尺寸类型,涉及CCD/CMOS尺寸计算。光学格式基于对角线长度比例,而尺寸类型常用于数码单反相机,如全画幅、APS-H和APS-C尺寸。随着技术发展,尽管像素数量增加,但保持或减小CCD尺寸可能导致画质问题。文章还提及了APS系统及其三种底片画幅,并列举了多种常见感光元件尺寸。
本文介绍了工业相机中感光元件尺寸的两种标示方法——光学格式和尺寸类型,涉及CCD/CMOS尺寸计算。光学格式基于对角线长度比例,而尺寸类型常用于数码单反相机,如全画幅、APS-H和APS-C尺寸。随着技术发展,尽管像素数量增加,但保持或减小CCD尺寸可能导致画质问题。文章还提及了APS系统及其三种底片画幅,并列举了多种常见感光元件尺寸。
工业相机——CCD/CMOS尺寸计算
最近有用到大恒的工业相机,学到很多相机方面的基础知识,借此机会开始码字记笔记,养成良好习惯。
感光元件尺寸
感光元件的尺寸有两种标示方法,即光学格式(OF,Optical Format)和尺寸类型。
(1)光学格式
光学格式一般用感光元件的对角线长度比例来表示,即OF=对角线长度/1英寸=对角线长度/16mm。需要注意的是,这里的1英寸并不等于通常的25.4mm,而是16mm,即感光元件为12.8mm×9.6mm时,它是1英寸感光元件。
业界通用的规范就是 1英吋 CCD尺寸= 长 12.8mm × 宽 9.6mm = 对角线为 16mm 之对应面积。透过“勾股定理”,可得出该三角之三边比例为 4:3:5;换句话说,我无须给你完整的面积参数,只要给你该三角形最长一边长度,你就可以透过简单的定理换算回来。而且面积对角线长度就是16除以那个分母。
这种标示方法多用于长宽比为4∶3的袖珍数码相机和消费级数码相机上,感光元件尺寸从1/5英寸到2/3英寸不等。这种标示方法与用来解释14、30吋电视屏幕大小之面积比例道理是完全一致,这里的尺寸并不是“单位”而是“比例 ”!
目前的趋势是在CCD尺寸不变甚至减小的前提下,尽量增加像素传感器的数量,以满足人们对像素无止境的要求。但是CCD尺寸不变,增加像素就意味着单个像素捕捉光线能力下降,从而会引发噪声增加、色彩还原不良、动态范围减小等问题。
(2)尺寸类型
数码单反相机的感光元件长宽比多为3∶2,其尺寸标示方法有所不同,一般用感光元件尺寸类型标示。主要分为全画幅Full Frame(接近或等于135画幅,如佳能1Ds系列、5D Mark II的36.0mm×24.0mm,尼康D3、D700的36.0mm×23.9mm,尼康D3x、索尼α900的35.9mm×24mm,佳能5D的35.8mm×23.9mm等)、APS-H尺寸(佳能1D 系列的28.1mm×18.7mm,镜头焦距转换系数为1.3)、APS-C尺寸(如23.6mm×15.8mm、22.2mm×14.8mm、20.7mm×13.8mm等,镜头焦距转换系数分别为1.5、1.6和1.7)。奥林巴斯、松下数码单反相机所用的感光元件尺寸为17.3mm×13.0mm,长宽比为4∶3,镜头焦距转换系数为2.0。从相机的结构上分类,有两种系统,分别称为4/3系统和微型4/3系统。
1996年由尼康、佳能、美能达、富士、柯达五大公司联合开发的APS系统(Advanced Photo System,即先进照片系统)问世。APS系统在原135胶片系统的基础上进行了较大改进,包括相机、感光材料、冲印设备、配套产品等全面创新,大幅度缩小胶片尺寸,使用新的智能暗盒设计,融入数字技术,成为能记录拍摄数据、辅助信息的智能型胶片系统。APS系统是对传统摄影体系的一次重大变革,本应有较好的发展前景。遗憾的是它生不逢时,由于数码相机的问世与迅猛发展,APS系统很快被淘汰。 APS系统共有三种底片画幅可供选择,即:APS-H、APS-C和APS-P。APS-H为30.2mm×16.7mm,是APS胶卷可摄取的最大画幅;APS-C是左右各挡去一部分,为25.5mm×16.7mm,长宽比接近135画幅的3:2;APS-P是上下各挡去一部分,为30.2mm×9.5mm,属于超宽银幕画幅。 数码单反相机的感光元件尺寸标示方法借用了APS标准,把感光元件尺寸接近APS-C尺寸的20.7mm×13.8mm(适马用)、22.2mm×14.8mm、22.3mm×14.9mm(上两种尺寸佳能用)、23.0mm×15.5mm(富士用)、23.4mm×15.6mm(宾得K20D)、23.5mm×15.6mm(索尼α700)、23.5mm×15.7mm(索尼α350、宾得K200D、K10D、K-m)、23.6mm×15.8mm(尼康用,称为DX格式,以及索尼α300、α200)等都称为APS-C画幅,而佳能EOS-1D系列所用的28.1mm×18.7mm称为APS-H画幅。
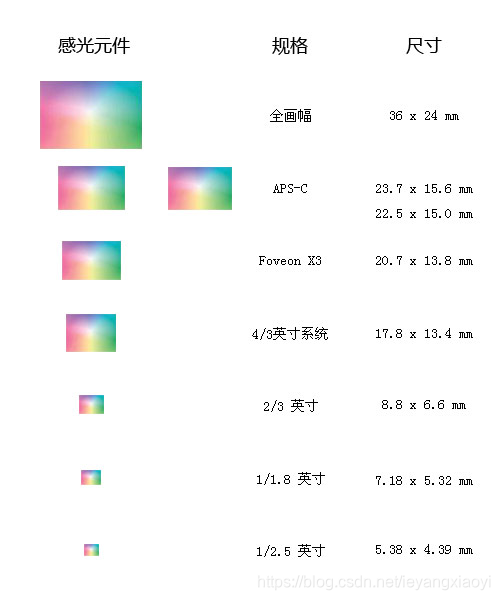
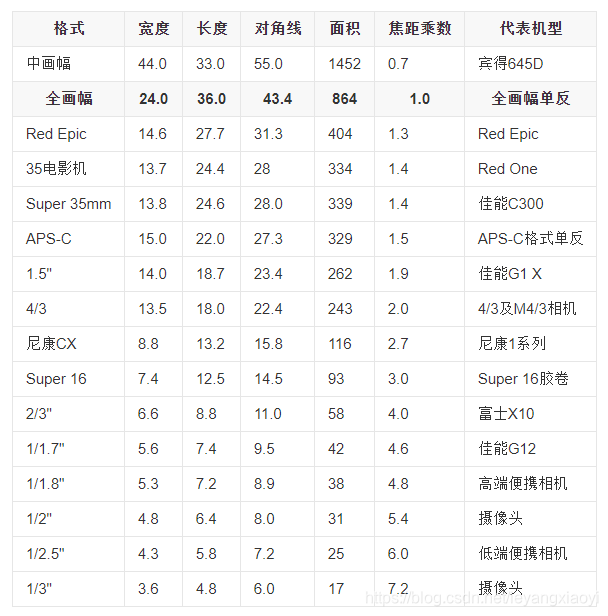
常见感光元件尺寸
相机的感光元件尺寸的宽高比例其实不是固定的,下面列举了一些不同规格的感光元件,其标示方法有的是光学格式,有的是尺寸类型,如何区分我还未特别清晰明了,希望有专业人士能回答我,如下图:

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









