







一、 激光雷达的配置
说明:设置ip以192.168.2.*为例,可自己随意更改,但是激光雷达和电脑的ip必须在同一局域网下
1、设置windows电脑的ip为192.168.2.5
2、在Windows下用SpoaET软件设置设备的ip为192.168.2.10
具体设置步骤请自行看sick给的文档。
3、设置ip之后,设置输出数据RSSI,这个勾选上。

具体原因请看:http://wiki.ros.org/sick_tim
4、在SpoaET软件上用终端试试用指令来获取数据
5、在Ubuntu上配置ip。
步骤:点击Ubuntu桌面右上角的数据标志-->编辑连接-->添加-->以太网-->新建-->输入连接名称-->点击以太网-->设备mac地址就选择默认的那一个-->IPv4设置-->方法:手动-->添加(地址:192.168.2.3 子网掩码:255.255.255.0网关:192.168.2.1)-->保存
6、在网络那里连接上新建的连接。
7、用网络调试助手,输入命令测试能否获取激光雷达的数据。
https://pan.baidu.com/s/1hsCyEyC linux下的网络调试助手软件
使用调试助手时,注意输入正确的ip(192.168.2.10),端口号(2112)。
选择tcp client
、 用sick提供的包,用ros读取信息
1、 启动ros
$roscore
2、 安装sick_tim的包
首先先cd到你的工作空间里如 ~/catkin_ws/src
命令:$sudo git clone http://github.com/uos/sick_tim.git
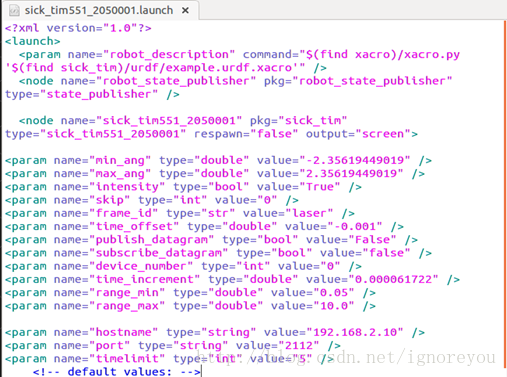
3、 修改launch文件,因为用的是tim561,而官方的库里只有551,571,所以更改tim551的launch。Launch文件路径:~/catkin_ws/src/sick_tim/launch/sick_tim551_2050001
注意修改你的设备ip和端口
4、 编译
在工作空间catkin_ws下用catkin_make编译一下
5、 Source一下
$source ~/catkin_ws/devel/setup.bash
6、 roslaunch一下
$roslaunch sick_timsick_tim551_2050001.launch
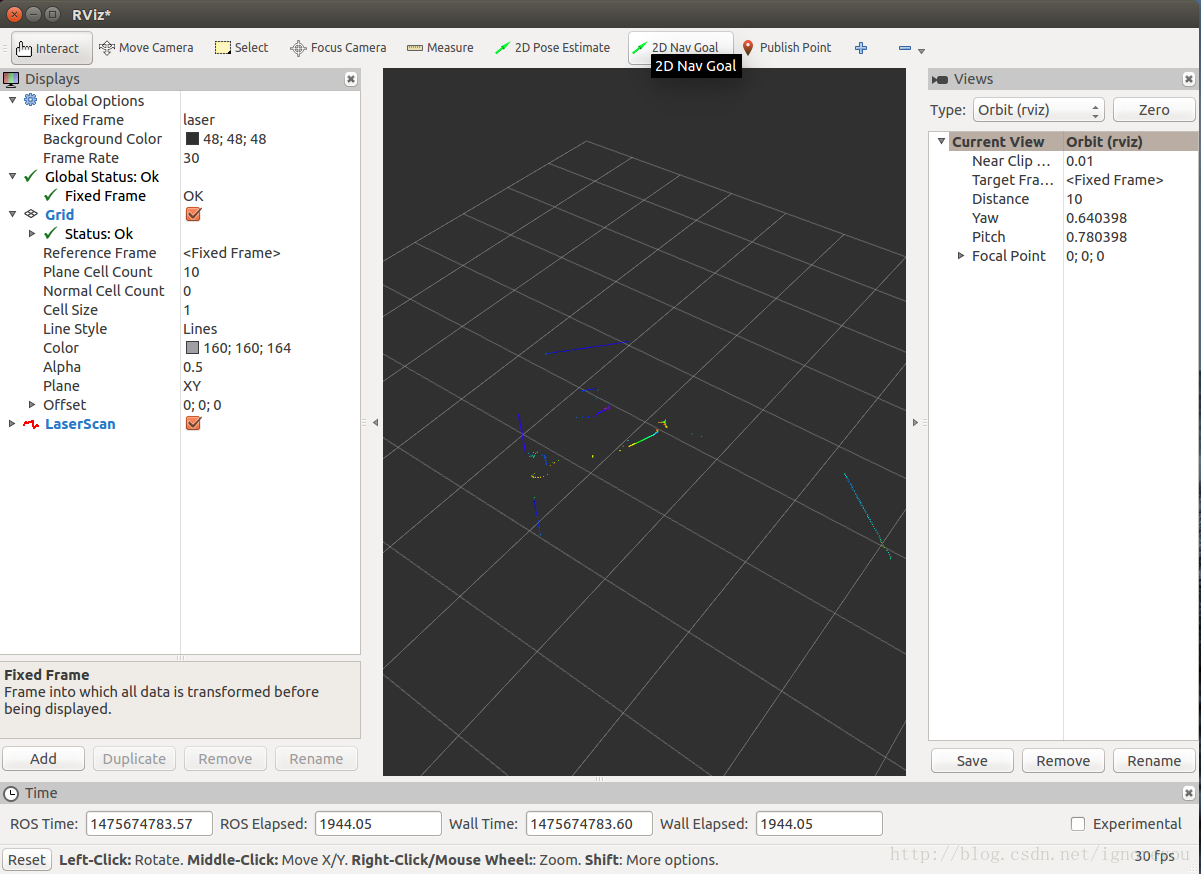
7、 启动rviz
$rosrun rviz rviz
8、 设置rviz
Fixed Frame 设置为launch里的laser
点击左下角的Add按钮-->display
type:Laserscan-->topic:/scan Laserscan-->ok















 2543
2543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









